
“Today’s rigid regulation systems considerably limit the adaptability and mobility of fluid-driven soft robots,” said Professor Robert Wood of Harvard’s school of engineering and applied sciences (SEAS). “We have developed soft and lightweight valves to control soft hydraulic actuators that open up possibilities for soft on-board controls for future fluidic soft robots.”
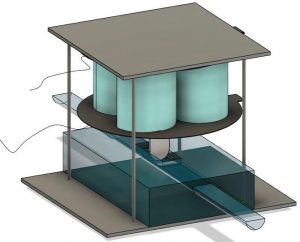
The valves combine an electrically-powered dielectric elastomer actuator (‘DEA’) with a soft fluid channel (see diagram) to produce an actuator that can run for hundreds of thousands of cycles.
“These soft valves have a fast response time and are able to control fluidic pressure and flow rates that match the needs of hydraulic actuators,” fellow researcher Siyi Xu. “These valves give us control of hydraulic actuators with internal volume ranging from hundreds of microliters to tens of milliliters.”
A 7mm tall version of the actuator weighs 350mg and work at at least 500Hz, controlling fluids at up to 51kPa and 40ml/minute within 100ms – compared to earlier soft valves that worked at <3.5kPa and <6 mL/minute, according to the team. Drive voltages above 1kV are required.
The work is described in ‘A dynamic electrically driven soft valve for control of soft hydraulic actuators‘, published by the US National Academy of Science – payment required fo rfull access.