Преимущества бесщеточных двигателей постоянного тока (BLDC) в робототехнике и автоматизации
Бесщеточные двигатели постоянного тока (BLDC) обладают многочисленными преимуществами по сравнению с щеточными двигателями, что делает их предпочтительным выбором в приложениях робототехники и автоматизации. Хотя для двигателей BLDC требуется система управления для точного регулирования скорости и крутящего момента, их преимущества перевешивают дополнительную сложность. К основным преимуществам двигателей BLDC относятся:
- Повышенная эффективность: двигатели BLDC обеспечивают более высокую энергоэффективность, что является решающим фактором, учитывая значительное глобальное потребление электроэнергии, связанное с электродвигателями.
- Точное управление: двигатели BLDC обеспечивают точное управление скоростью и крутящим моментом, что обеспечивает оптимальную производительность при различных условиях нагрузки. Этот уровень контроля необходим в робототехнике и автоматизации, где требуются точные движения и реакции.
- Повышенная долговечность: в отличие от щеточных двигателей, производительность которых снижается из-за износа щеток и искрения, двигатели BLDC сохраняют свою производительность с течением времени. Такая долговечность способствует общей надежности и сроку службы роботизированных систем.
- Низкий уровень шума: двигатели BLDC работают тихо, сводя к минимуму шум в роботизированных приложениях. Эта характеристика особенно важна в средах, где требуется снижение уровня шума для улучшения работы пользователей или соответствия нормативным стандартам.
- Снижение электромагнитных помех (EMI): двигатели BLDC создают более низкий уровень электромагнитных помех, обеспечивая минимальное нарушение работы других электронных компонентов или систем связи в робототехнических системах.
- Компактная и легкая конструкция: Двигатели BLDC спроектированы так, чтобы быть компактными и легкими, что делает их подходящими для приложений с ограниченным пространством или ограничениями по весу. Это преимущество облегчает интеграцию двигателей BLDC в различные роботизированные системы, от небольших устройств до крупных установок промышленной автоматизации.
Благодаря превосходной эффективности, точному управлению, долговечности, малошумной работе, уменьшенным электромагнитным помехам и компактной конструкции двигатели BLDC стали незаменимыми в широком диапазоне применений. От жестких дисков компьютеров до электромобилей и от небольших роботов до крупной промышленной автоматизации двигатели BLDC продолжают способствовать повышению эффективности и производительности в отрасли робототехники и автоматизации.


Одним из недостатков двигателей BLDC является сложное управление. схема и последующий рост расходов. Точно синхронизированные электрические сигналы необходимы для электронной техники переключения, что требует схем драйверов, которые могут их генерировать.
Тем не менее, современные разработчики теперь имеют преимущество в широкой коммерческой доступности силовых устройств, специально разработанных для приводов двигателей постоянного тока BLDC. Эти устройства бывают автономными или интегрированными с микроконтроллером (контроллером), что упрощает процесс проектирования и снижает общую стоимость решения.
Контроллеры
Помимо регулирования скорости и крутящего момента, он играет решающую роль в запуске, остановке и реверсировании вращения двигателя. Он может получать информацию о положении ротора двумя способами: датчик-управление, когда контроллер получает эти данные напрямую, или бездатчиковое управление, когда контроллер выводит положение с помощью соответствующих алгоритмов, реализованных на программно-аппаратном уровне. Электрические сигналы, подаваемые на силовые полевые МОП-транзисторы, по амплитуде и продолжительности определяются в зависимости от положения ротора.
Двигатели BLDC с датчиками обычно используются в приложениях, где требуется запуск двигателя под нагрузкой, поскольку точное положение двигателя сразу известно. Существует несколько методов определения положения:
- Магнитные датчики на эффекте Холла: эти датчики обладают высокой устойчивостью и могут эффективно работать даже в суровых условиях, например, в автомобильных приложениях.
- Поворотные энкодеры: эти устройства преобразуют механическое движение в электрические импульсы и предоставляют важные данные, такие как положение, скорость и направление. В зависимости от technology При использовании энкодеры могут быть оптическими, емкостными или магнитными.
- Датчики с переменным магнитным сопротивлением: эти датчики генерируют электрический сигнал, который соответствует смещению магнитопроводящего или проницаемого объекта относительно катушки.

В бездатчиковом контроллере используется метод оценки противоэлектродвижущей силы (ЭДС), создаваемой в обмотках статора вращающимся якорем, для определения текущего положения ротора. Измеряя противо-ЭДС, контроллер может определить положение ротора, причем более высокая противо-ЭДС указывает на более близкий магнит.
Проектирование или выбор контроллера является важной задачей, требующей тщательной точности. Основные функции, выполняемые контроллером двигателя, следующие:
- Регулировка скорости и направления: Контроллер регулирует скорость двигателя и контролирует направление его вращения.
- Регулирование крутящего момента: контролируя приложенную нагрузку, контроллер определяет соответствующее значение крутящего момента для достижения оптимальной производительности двигателя.
- Управление фазами пуска и останова: контроллер постепенно запускает и останавливает двигатель, следуя точным профилям ускорения и замедления.
- Защита от перенапряжения или перегрузки по току: Контроллер защищает двигатель, обнаруживая и реагируя на чрезмерные нагрузки. напряжение или текущий уровень.
- Оптимизация эффективности двигателя: контроллер управляет различными параметрами двигателя, чтобы максимизировать общую эффективность.
В прошлом контроллеры были построены с использованием дискретных компонентов вместе с микроконтроллером, который выполнял прошивку с алгоритмами управления. Однако современная тенденция отдает предпочтение решениям с высокой степенью интеграции, которые объединяют функции питания и управления в одном чипе.
Двигатели BLDC (бесщеточные двигатели постоянного тока) находят широкое применение
Двигатели BLDC (бесщеточные двигатели постоянного тока) находят широкое применение в различных отраслях промышленности и системах благодаря своим выгодным конструктивным характеристикам. Преимущества, получаемые от электронной коммутации, такие как улучшенное управление током, увеличенный крутящий момент, точное управление скоростью и общее улучшение характеристик двигателя, способствуют их широкому использованию. Некоторые из известных применений двигателей BLDC включают:
- Промышленное применение: двигатели BLDC используются в промышленных машинах и оборудовании, таком как насосы, компрессоры, конвейеры и станки, для обеспечения эффективной и надежной работы.
- Электромобили (EV) и электромобильность: двигатели BLDC являются неотъемлемой частью электромобилей, включая автомобили, мотоциклы, скутеры и велосипеды, благодаря их высокой эффективности, удельной мощности и увеличенному запасу хода.
- Беспилотные летательные аппараты (БПЛА) и дроны: двигатели BLDC обычно используются в БПЛА и дронах из-за их легкой конструкции, высокой эффективности и точного управления, обеспечивающих стабильный полет и маневренность.
- Жесткие диски: двигатели BLDC используются в жестких дисках для обеспечения точного и надежного управления двигателем шпинделя, обеспечивая точные операции чтения/записи данных.
- Бытовая электроника: двигатели BLDC используются в различных бытовых электронных устройствах, таких как вентиляторы, кондиционеры, холодильники и стиральные машины, обеспечивая энергоэффективность, тихую работу и увеличенный срок службы.
- Робототехника и промышленная автоматизация: двигатели BLDC широко используются в роботизированных системах и оборудовании автоматизации благодаря точному управлению движением, высокому крутящему моменту и долговечности. Они обеспечивают более безопасные и эффективные процессы, повышая производительность в промышленности.
В частности, промышленные роботы-манипуляторы революционизируют производственные процессы, повышая безопасность работников, ускоряя производство и повышая производительность. Эти универсальные и программируемые роботы-манипуляторы используются на фабриках, складах и даже в сельском хозяйстве. Двигатели BLDC играют жизненно важную роль в манипуляторах роботов, обеспечивая точное регулирование скорости и крутящего момента, наряду с надежностью, долговечностью и невосприимчивостью к электромагнитному излучению.
Таким образом, способность двигателей BLDC обеспечивать точное регулирование скорости, высокий крутящий момент, долговечность и устойчивость к электромагнитным помехам делает их хорошо подходящими для различных применений, от промышленного оборудования до электромобилей и робототехники.
Проектирование
Разработка контроллера BLDC требует опыта как в аппаратных, так и в программных аспектах. Хотя имеющиеся в продаже интегрированные решения могут удовлетворить требования большинства приложений, в некоторых случаях может потребоваться индивидуальное решение.
Драйвер: Для облегчения электронной коммутации обычно используются силовые транзисторы, способные выдерживать высокие напряжения и токи. Примеры таких транзисторов включают кремниевые (Si) МОП-транзисторы, IGBTs, карбид кремния (SiC) MOSFETsи нитрида галлия (GaN) HEMT.
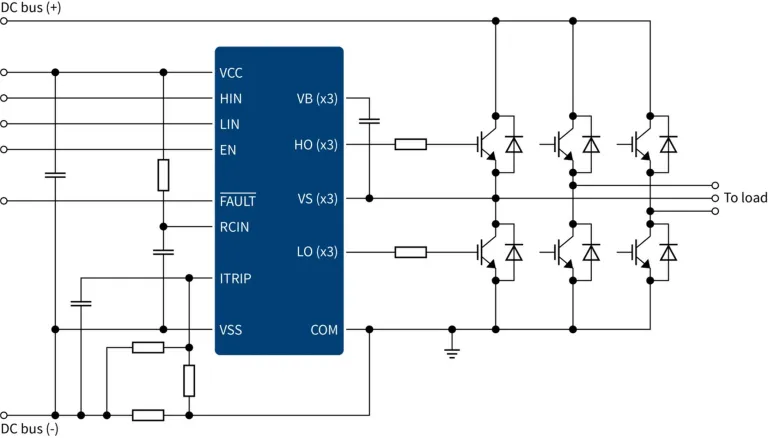
Обычный подход к контроллеру BLDC включает полумостовую топологию. В этой топологии используются два коммутатора, один Транзистор на высокой стороне и один на низкой стороне, в отличие от полного решения H-моста. С Трехфазный Двигатели BLDC обычно используются в робототехнике и промышленной автоматизации из-за их превосходных характеристик и эффективности по сравнению с однофазными или двухфазными вариантами. Типичная схема контроллера состоит из трех полумостов. На рис. 3 показана схема Трехфазный Драйвер с высокоинтегрированным драйвером затвора.

Контроль над трехфазный Двигатель BLDC включает шесть шагов, которые составляют полный цикл коммутации, чтобы подать питание на все три обмотки статора. Это достигается за счет последовательного включения и выключения транзисторов верхнего и нижнего плеча.
Переключатели верхнего плеча обычно управляются с помощью широтно-импульсной модуляции (ШИМ) техника. ШИМ преобразует вход постоянного тока напряжение в модулированное напряжение привода, что обеспечивает более эффективное управление, особенно во время запуска двигателя, и позволяет точно контролировать скорость и крутящий момент.
Выбор частоты ШИМ является важным фактором. Разработчики часто стремятся найти баланс между потерями на переключение, которые более выражены на высоких частотах, и пульсирующими токами, которые в основном генерируются на низких частотах. Использование устройств GaN (нитрид галлия) позволяет значительно снизить коммутационные потери даже на высоких частотах.
Тщательно оптимизируя частоту ШИМ и используя преимущества технологии GaN, разработчики могут повысить эффективность и производительность управления трехфазным двигателем постоянного тока.