ข้อดีของมอเตอร์กระแสตรงไร้แปรงถ่าน (BLDC) ในวิทยาการหุ่นยนต์และระบบอัตโนมัติ
มอเตอร์ DC แบบไร้แปรงถ่าน (BLDC) มีข้อดีหลายประการเหนือมอเตอร์แบบมีแปรงถ่าน ทำให้มอเตอร์เหล่านี้เป็นตัวเลือกที่ต้องการในการใช้งานด้านวิทยาการหุ่นยนต์และระบบอัตโนมัติ แม้ว่ามอเตอร์ BLDC ต้องการระบบควบคุมเพื่อการควบคุมความเร็วและแรงบิดที่แม่นยำ ประโยชน์ของมอเตอร์เหล่านี้มีมากกว่าความซับซ้อนเพิ่มเติม ข้อได้เปรียบที่สำคัญของมอเตอร์ BLDC ได้แก่:
- ประสิทธิภาพที่เพิ่มขึ้น: มอเตอร์ BLDC มอบประสิทธิภาพการใช้พลังงานที่สูงขึ้น ซึ่งเป็นปัจจัยสำคัญเมื่อพิจารณาถึงปริมาณการใช้ไฟฟ้าทั่วโลกที่มีนัยสำคัญจากมอเตอร์ไฟฟ้า
- การควบคุมที่แม่นยำ: มอเตอร์ BLDC ช่วยให้สามารถควบคุมความเร็วและแรงบิดได้อย่างแม่นยำ ทำให้ได้ประสิทธิภาพสูงสุดภายใต้สภาวะการโหลดที่แตกต่างกัน การควบคุมระดับนี้มีความสำคัญในระบบหุ่นยนต์และระบบอัตโนมัติ ซึ่งจำเป็นต้องมีการเคลื่อนไหวและการตอบสนองที่แม่นยำ
- ความทนทานที่ได้รับการปรับปรุง: ไม่เหมือนกับมอเตอร์แบบแปรงถ่านที่ประสิทธิภาพการทำงานลดลงเนื่องจากการสึกหรอของแปรงถ่านและการเกิดประกายไฟ มอเตอร์ BLDC จะรักษาประสิทธิภาพไว้เมื่อเวลาผ่านไป อายุการใช้งานที่ยาวนานนี้ช่วยเพิ่มความน่าเชื่อถือและอายุการใช้งานโดยรวมของระบบหุ่นยนต์
- การทำงานที่มีเสียงรบกวนต่ำ: มอเตอร์ BLDC ทำงานเงียบ ลดการสร้างเสียงรบกวนในการใช้งานหุ่นยนต์ คุณลักษณะนี้มีความสำคัญอย่างยิ่งในสภาพแวดล้อมที่ต้องการระดับเสียงรบกวนที่ลดลงเพื่อประสบการณ์ของผู้ใช้ที่ดีขึ้นหรือเพื่อให้เป็นไปตามมาตรฐานข้อบังคับ
- การรบกวนทางแม่เหล็กไฟฟ้าที่ลดลง (EMI): มอเตอร์ BLDC สร้างการรบกวนทางแม่เหล็กไฟฟ้าในระดับที่ต่ำกว่า ทำให้มั่นใจได้ว่าชิ้นส่วนอิเล็กทรอนิกส์หรือระบบสื่อสารภายในระบบหุ่นยนต์จะหยุดชะงักน้อยที่สุด
- การออกแบบที่กะทัดรัดและน้ำหนักเบา: มอเตอร์ BLDC ได้รับการออกแบบให้มีขนาดกะทัดรัดและน้ำหนักเบา จึงเหมาะสำหรับการใช้งานที่มีข้อจำกัดด้านพื้นที่หรือน้ำหนักที่จำกัด ข้อดีนี้ช่วยอำนวยความสะดวกในการรวมมอเตอร์ BLDC เข้ากับระบบหุ่นยนต์ต่างๆ ตั้งแต่อุปกรณ์ขนาดเล็กไปจนถึงการตั้งค่าระบบอัตโนมัติทางอุตสาหกรรมขนาดใหญ่
ด้วยประสิทธิภาพที่เหนือกว่า การควบคุมที่แม่นยำ ความทนทาน การทำงานที่มีเสียงรบกวนต่ำ ลด EMI และการออกแบบที่กะทัดรัด มอเตอร์ BLDC จึงกลายเป็นสิ่งที่ขาดไม่ได้ในการใช้งานที่หลากหลาย ตั้งแต่ฮาร์ดไดรฟ์คอมพิวเตอร์ไปจนถึงยานพาหนะไฟฟ้า และจากหุ่นยนต์ขนาดเล็กไปจนถึงระบบอัตโนมัติทางอุตสาหกรรมขนาดใหญ่ มอเตอร์ BLDC ยังคงขับเคลื่อนความก้าวหน้าในด้านประสิทธิภาพและสมรรถนะในอุตสาหกรรมหุ่นยนต์และระบบอัตโนมัติ


ข้อเสียอย่างหนึ่งของมอเตอร์ BLDC คือการควบคุมที่ซับซ้อน วงจรไฟฟ้า และมีค่าใช้จ่ายเพิ่มขึ้นตามมา สัญญาณไฟฟ้าที่ตั้งเวลาได้อย่างแม่นยำเป็นสิ่งจำเป็นสำหรับเทคนิคการสวิตชิ่งอิเล็กทรอนิกส์ โดยจำเป็นต้องมีวงจรขับที่สามารถสร้างสัญญาณดังกล่าวได้
อย่างไรก็ตาม ขณะนี้นักออกแบบสมัยใหม่มีข้อได้เปรียบจากอุปกรณ์จ่ายไฟที่มีวางจำหน่ายทั่วไปซึ่งออกแบบมาสำหรับไดรเวอร์มอเตอร์ BLDC โดยเฉพาะ อุปกรณ์เหล่านี้มาในรูปแบบสแตนด์อโลนหรือรวมเข้ากับไมโครคอนโทรลเลอร์ (คอนโทรลเลอร์) ทำให้กระบวนการออกแบบง่ายขึ้นและลดต้นทุนโดยรวมของโซลูชัน
ผู้ควบคุม
นอกเหนือจากการควบคุมความเร็วและแรงบิดแล้ว ยังมีบทบาทสำคัญในการเริ่มต้น หยุด และย้อนกลับการหมุนของมอเตอร์ สามารถรับข้อมูลตำแหน่งโรเตอร์ได้สองวิธี: เซ็นเซอร์- ประเภทการควบคุม ซึ่งตัวควบคุมจะได้รับข้อมูลนี้โดยตรง หรือการควบคุมแบบไร้เซ็นเซอร์ ซึ่งตัวควบคุมจะอนุมานตำแหน่งโดยใช้อัลกอริธึมที่เหมาะสมที่นำมาใช้ในระดับเฟิร์มแวร์หรือฮาร์ดแวร์ สัญญาณไฟฟ้าที่ใช้กับ Power MOSFET ในแง่ของแอมพลิจูดและระยะเวลา จะพิจารณาจากตำแหน่งของโรเตอร์
โดยทั่วไปแล้วมอเตอร์ BLDC แบบเซนเซอร์จะถูกนำไปใช้งานที่ต้องการสตาร์ทมอเตอร์ภายใต้ภาระ เนื่องจากทราบตำแหน่งที่แน่นอนของมอเตอร์ในทันที มีหลายวิธีในการกำหนดตำแหน่ง:
- เซ็นเซอร์แม่เหล็ก Hall-effect: เซ็นเซอร์เหล่านี้มีความยืดหยุ่นสูงและสามารถทำงานได้อย่างมีประสิทธิภาพแม้ในสภาวะที่รุนแรง เช่น การใช้งานในรถยนต์
- ตัวเข้ารหัสแบบโรตารี: อุปกรณ์เหล่านี้จะแปลงการเคลื่อนที่ทางกลเป็นแรงกระตุ้นทางไฟฟ้า และให้ข้อมูลที่สำคัญ เช่น ตำแหน่ง ความเร็ว และทิศทาง ขึ้นอยู่กับ เทคโนโลยี ใช้งาน ตัวเข้ารหัสอาจเป็นแบบออปติคอล คาปาซิทีฟ หรือแม่เหล็ก
- เซ็นเซอร์ฝืนตัวแปร: เซ็นเซอร์เหล่านี้สร้างสัญญาณไฟฟ้าที่สอดคล้องกับการกระจัดของวัตถุที่เป็นสื่อกระแสไฟฟ้าหรือวัตถุที่ซึมผ่านได้ซึ่งสัมพันธ์กับขดลวด

ตัวควบคุมไร้เซ็นเซอร์ใช้เทคนิคการประเมินแรงเคลื่อนไฟฟ้าย้อนกลับ (EMF) ที่สร้างขึ้นในขดลวดสเตเตอร์โดยกระดองที่หมุนเพื่อตรวจจับตำแหน่งปัจจุบันของโรเตอร์ โดยการวัด EMF ด้านหลัง ตัวควบคุมสามารถกำหนดตำแหน่งของโรเตอร์ โดย EMF ด้านหลังที่สูงขึ้นแสดงว่าแม่เหล็กอยู่ใกล้มากขึ้น
การออกแบบหรือการเลือกคอนโทรลเลอร์เป็นงานที่สำคัญซึ่งต้องการความแม่นยำอย่างพิถีพิถัน หน้าที่หลักที่ดำเนินการโดยตัวควบคุมมอเตอร์มีดังนี้:
- การควบคุมความเร็วและทิศทาง: ตัวควบคุมจะควบคุมความเร็วของมอเตอร์และควบคุมทิศทางการหมุน
- การควบคุมแรงบิด: โดยการตรวจสอบโหลดที่ใช้ ตัวควบคุมจะกำหนดค่าแรงบิดที่เหมาะสมเพื่อให้ได้สมรรถนะของมอเตอร์ที่เหมาะสมที่สุด
- การจัดการระยะเริ่มต้นและหยุด: ตัวควบคุมจะค่อยๆ เริ่มต้นและหยุดมอเตอร์ ตามโปรไฟล์การเร่งความเร็วและการลดความเร็วที่แม่นยำ
- การป้องกันแรงดันไฟเกินหรือกระแสไฟเกิน: ตัวควบคุมจะปกป้องมอเตอร์โดยการตรวจจับและตอบสนองต่อกระแสไฟฟ้าที่มากเกินไป แรงดันไฟฟ้า หรือระดับปัจจุบัน
- การเพิ่มประสิทธิภาพของมอเตอร์: ตัวควบคุมจะจัดการพารามิเตอร์ต่างๆ ของเครื่องยนต์เพื่อเพิ่มประสิทธิภาพโดยรวมสูงสุด
ในอดีต คอนโทรลเลอร์ถูกสร้างขึ้นโดยใช้ส่วนประกอบแยกพร้อมกับไมโครคอนโทรลเลอร์ที่สั่งงานเฟิร์มแวร์ด้วยอัลกอริธึมการควบคุม อย่างไรก็ตาม เทรนด์ปัจจุบันนิยมโซลูชันแบบบูรณาการสูงที่รวมพลังและฟังก์ชันการควบคุมไว้ในชิปตัวเดียว
มอเตอร์ BLDC (Brushless DC) ใช้งานได้หลากหลาย
มอเตอร์ BLDC (Brushless DC) มีการใช้งานอย่างกว้างขวางในอุตสาหกรรมและระบบต่างๆ เนื่องจากลักษณะโครงสร้างที่ได้เปรียบ ประโยชน์ที่ได้รับจากการแลกเปลี่ยนทางอิเล็กทรอนิกส์ เช่น การจัดการกระแสไฟฟ้าที่เพิ่มขึ้น แรงบิดที่เพิ่มขึ้น การควบคุมความเร็วที่แม่นยำ และการปรับปรุงประสิทธิภาพมอเตอร์โดยรวม มีส่วนช่วยในการใช้งานอย่างกว้างขวาง การใช้งานที่โดดเด่นของมอเตอร์ BLDC ได้แก่:
- การใช้งานในอุตสาหกรรม: มอเตอร์ BLDC ใช้ในเครื่องจักรและอุปกรณ์อุตสาหกรรม เช่น ปั๊ม คอมเพรสเซอร์ สายพานลำเลียง และเครื่องมือเครื่องจักร เพื่อให้การทำงานมีประสิทธิภาพและเชื่อถือได้
- รถยนต์ไฟฟ้า (EV) และ e-mobility: มอเตอร์ BLDC เป็นส่วนสำคัญของรถยนต์ไฟฟ้า รวมถึงรถยนต์ รถจักรยานยนต์ สกูตเตอร์ และจักรยาน เนื่องจากมีประสิทธิภาพสูง ความหนาแน่นของพลังงาน และช่วงที่ดีขึ้น
- ยานพาหนะทางอากาศไร้คนขับ (UAV) และโดรน: มอเตอร์ BLDC มักใช้ใน UAV และโดรนเนื่องจากการออกแบบให้มีน้ำหนักเบา ประสิทธิภาพสูง และการควบคุมที่แม่นยำ ช่วยให้บินได้อย่างมั่นคงและคล่องแคล่ว
- ฮาร์ดไดรฟ์: มอเตอร์ BLDC ใช้ในฮาร์ดดิสก์ไดรฟ์เพื่อให้ได้การควบคุมมอเตอร์สปินเดิลที่แม่นยำและเชื่อถือได้ จึงมั่นใจได้ถึงการดำเนินการอ่าน/เขียนข้อมูลที่แม่นยำ
- อุปกรณ์อิเล็กทรอนิกส์สำหรับผู้บริโภค: มอเตอร์ BLDC พบได้ในอุปกรณ์อิเล็กทรอนิกส์สำหรับผู้บริโภคต่างๆ เช่น พัดลม เครื่องปรับอากาศ ตู้เย็น และเครื่องซักผ้า โดยมอบประสิทธิภาพการใช้พลังงาน การทำงานที่เงียบ และอายุการใช้งานที่ยาวนานขึ้น
- วิทยาการหุ่นยนต์และระบบอัตโนมัติทางอุตสาหกรรม: มอเตอร์ BLDC ถูกนำมาใช้อย่างกว้างขวางในระบบหุ่นยนต์และอุปกรณ์อัตโนมัติเพื่อการควบคุมการเคลื่อนไหวที่แม่นยำ แรงบิดสูง และความทนทาน ช่วยให้กระบวนการปลอดภัยและมีประสิทธิภาพมากขึ้น ช่วยเพิ่มผลผลิตในอุตสาหกรรม
โดยเฉพาะอย่างยิ่งแขนหุ่นยนต์อุตสาหกรรมกำลังปฏิวัติกระบวนการผลิตโดยการปรับปรุงความปลอดภัยของพนักงาน เร่งการผลิต และเพิ่มผลิตภาพ แขนหุ่นยนต์อเนกประสงค์และตั้งโปรแกรมได้เหล่านี้ถูกนำมาใช้ในโรงงาน โกดัง และแม้แต่สถานที่เกษตรกรรม มอเตอร์ BLDC มีบทบาทสำคัญในแขนหุ่นยนต์โดยให้การควบคุมความเร็วและแรงบิดที่แม่นยำ ควบคู่ไปกับความน่าเชื่อถือ ความทนทาน และภูมิคุ้มกันต่อรังสีแม่เหล็กไฟฟ้า
โดยสรุป ความสามารถของมอเตอร์ BLDC ในการควบคุมความเร็วที่แม่นยำ แรงบิดสูง ความทนทาน และการป้องกันการรบกวนทางแม่เหล็กไฟฟ้าทำให้มอเตอร์เหล่านี้เหมาะสำหรับการใช้งานที่หลากหลาย ตั้งแต่เครื่องจักรอุตสาหกรรมไปจนถึงยานยนต์ไฟฟ้าและหุ่นยนต์
การออกแบบ
การออกแบบคอนโทรลเลอร์ BLDC ต้องใช้ความเชี่ยวชาญทั้งด้านฮาร์ดแวร์และซอฟต์แวร์ แม้ว่าโซลูชันแบบรวมที่มีจำหน่ายในท้องตลาดจะสามารถตอบสนองความต้องการของแอปพลิเคชันส่วนใหญ่ได้ แต่ก็มีบางกรณีที่อาจจำเป็นต้องใช้โซลูชันแบบกำหนดเอง
คนขับรถ: เพื่ออำนวยความสะดวกในการแลกเปลี่ยนทางอิเล็กทรอนิกส์ โดยทั่วไปจะใช้ทรานซิสเตอร์กำลังที่สามารถทนต่อแรงดันไฟฟ้าและกระแสสูงได้ ตัวอย่างของทรานซิสเตอร์ดังกล่าว ได้แก่ ซิลิคอน (Si) MOSFET IGBTs, ซิลิคอนคาร์ไบด์ (SiC) MOSFETsและแกลเลียมไนไตรด์ (GaN) HEMTs
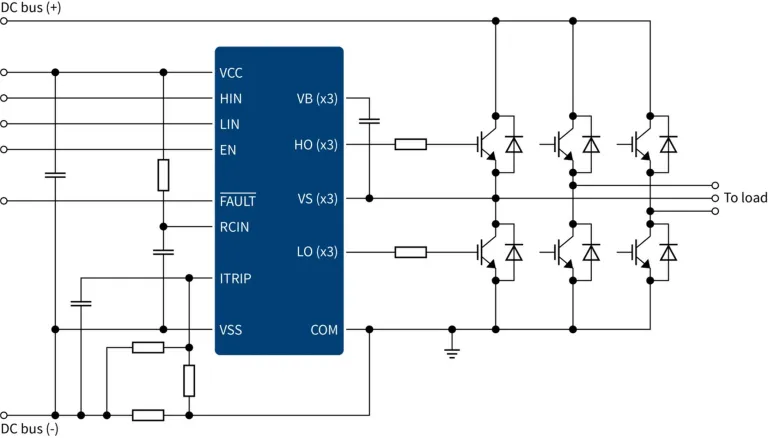
วิธีการทั่วไปสำหรับตัวควบคุม BLDC เกี่ยวข้องกับโทโพโลยีแบบครึ่งสะพาน โทโพโลยีนี้ใช้สวิตช์สองตัว โดยหนึ่งตัว ทรานซิสเตอร์ ที่ด้านสูงและอีกด้านที่ด้านต่ำ ซึ่งตรงข้ามกับโซลูชัน H-bridge แบบเต็ม เนื่องจาก สามเฟส มอเตอร์ BLDC มักใช้ในหุ่นยนต์และระบบอัตโนมัติทางอุตสาหกรรม เนื่องจากประสิทธิภาพและประสิทธิภาพที่เหนือกว่าเมื่อเทียบกับรุ่นเฟสเดียวหรือสองเฟส รูปแบบตัวควบคุมทั่วไปประกอบด้วยฮาล์ฟบริดจ์สามตัว รูปที่ 3 แสดงไดอะแกรมของ สามเฟส คนขับใช้ไดรเวอร์เกทแบบบูรณาการสูง

การควบคุมของก สามเฟส มอเตอร์ BLDC เกี่ยวข้องกับหกขั้นตอน ซึ่งประกอบกันเป็นวงจรการเปลี่ยนที่สมบูรณ์ เพื่อจ่ายพลังงานให้กับขดลวดสเตเตอร์ทั้งสาม สิ่งนี้ทำได้โดยการเปิดและปิดทรานซิสเตอร์ด้านสูงและด้านต่ำตามลำดับ
สวิตช์ด้านสูงมักถูกควบคุมโดยใช้การมอดูเลตความกว้างพัลส์ (PWM) เทคนิค PWM แปลงอินพุต DC แรงดันไฟฟ้า เป็นแรงดันไฟฟ้ามอดูเลตไดรฟ์ ช่วยให้การจัดการมีประสิทธิภาพมากขึ้น โดยเฉพาะระหว่างสตาร์ทมอเตอร์ และทำให้สามารถควบคุมความเร็วและแรงบิดได้อย่างแม่นยำ
การเลือกความถี่ PWM ถือเป็นการพิจารณาที่สำคัญ นักออกแบบมักมุ่งหาความสมดุลระหว่างการสูญเสียการสลับ ซึ่งเด่นชัดกว่าที่ความถี่สูง และกระแสกระเพื่อม ซึ่งส่วนใหญ่สร้างขึ้นที่ความถี่ต่ำ การใช้อุปกรณ์ GaN (แกลเลียมไนไตรด์) สามารถลดการสูญเสียการสลับได้อย่างมาก แม้ในความถี่สูง
การปรับความถี่ PWM ให้เหมาะสมและใช้ประโยชน์จากเทคโนโลยี GaN อย่างระมัดระวัง นักออกแบบสามารถบรรลุประสิทธิภาพและประสิทธิภาพในการควบคุมมอเตอร์ BLDC สามเฟสที่ดีขึ้น