“As more battery-powered drones take to the skies, drone manufacturers face intense competitive pressure to expand the functionality and performance of their designs while minimizing power consumption for longer flight times. To meet market demands, designers continue to add more sophisticated and accurate accelerometers and gyroscopes, and upgrade associated firmware to take advantage of the improved sensors. The physical capabilities of drones are also gradually expanding to include onboard bags and onboard equipment, which requires improved stability and airbraking procedures to deal with the increased weight.
“
Author: Bill Giovino
As more battery-powered drones take to the skies, drone manufacturers face intense competitive pressure to expand the functionality and performance of their designs while minimizing power consumption for longer flight times. To meet market demands, designers continue to add more sophisticated and accurate accelerometers and gyroscopes, and upgrade associated firmware to take advantage of the improved sensors. The physical capabilities of drones are also gradually expanding to include onboard bags and onboard equipment, which requires improved stability and airbraking procedures to deal with the increased weight.
The problem for designers is that the increased weight and computing demands of drones increase power consumption, which in turn reduces flight time for a given battery size. In addition, other features, functions, and associated electronics add to development time and test costs.
Improving integration is the solution. This article will introduce Octavo Systems’ System-in-Package (SiP) solution, which is almost a tiny drone computer. This article will show how to take advantage of the features of this self-contained solution to save significant space and weight to extend flight time, while reducing bill of materials (BOM) and development time, inventory and testing costs.
drone technology
The range of applications for drones continues to expand, from small consumer-facing drones with cameras for family photos or friendly matches, to more challenging roles such as delivering packages for couriers, tracking for ranchers Livestock, monitoring crops for farmers, monitoring shoreline changes for environmental workers, and assisting first responders in search and rescue operations, to name a few. Regardless of the application, battery life in relation to flight time is one of the most critical factors in choosing a drone.
Battery life is obviously related to the weight of the drone, so the drone needs to use the lightest possible materials and be able to hold the frame of the aircraft under the stresses and strains of powered flight. This focus on lightweighting extends from structural integrity all the way to the electronics that control the drone.
For proper flight dynamics, the drone must be properly balanced by evenly distributing the weight of the frame and onboard electronics. The smaller the electronics, the easier it is to balance the weight of the drone. Ideally, the center of gravity should be at the physical center of the drone. Any weight imbalance, no matter how small, must be compensated by adjusting the RPM of the propellers, which over time consumes extra power and wastes the user’s valuable flight time.
Consumer drones and most commercial drones use Wi-Fi technology for control and data transmission. The farther the drone flies, the more power the Wi-Fi radio has to put out to keep in touch with the controller, another big drain on the battery.
UAV Sensors and Processing
While drone makers seek to reduce system weight and cost, users crave more functionality and performance, making drones and their firmware even more complex. This would increase the amount and weight of onboard electronics, and would also affect the balance of the drone.
For example, drones typically use a variety of microelectromechanical systems (MEMS) and other sensors to maintain steady flight while monitoring heading and speed (Figure 1). The Global Positioning System (GPS) module can be used to determine the bearing and orientation of the aircraft; the gyroscope can be used to measure pitch and yaw; the accelerometer can be used to measure the acceleration and impact of the drone; and the barometer can be used to measure the air pressure to help determine the current Optimal propeller speed in atmospheric conditions – increase rotor speed when air pressure is low, and decrease speed when air pressure is high; cameras and proximity sensors enable obstacle detection and avoidance. Also, for safety reasons, multiple redundant sensors may be used.
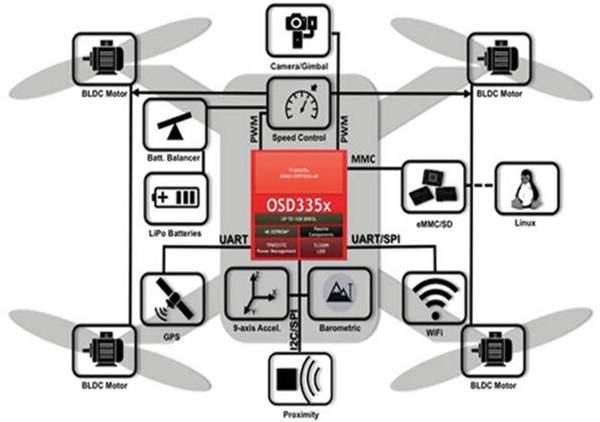
Figure 1: Modern quadcopters have a variety of MEMS sensors, at least one camera, an external memory card for microcontroller firmware or to store photos, and motor drivers to drive the propellers. (Image credit: Octavo Systems)

All outputs from these sensors are fed to the microcontroller that operates the drone. The microcontroller must process all these sensor inputs and use them to determine the most efficient way to power the power-hungry brushless DC (BLDC) motors that drive the propellers. However, as sensor technology advances year by year, drone manufacturers continue to fit the newest, most accurate, and most sophisticated sensors onto the latest drones. This requires more complex firmware to take full advantage of the enhanced capabilities of these sensors. Also, flight control firmware is improving all the time, especially for autonomous drones. All of these improvements not only increase the amount of firmware, but also require increased processing power and a substantial increase in memory to process data accurately.
The expansion of Electronic devices and functions presents engineers with a challenge to design small form factor solutions that consume less power to meet growing demands while minimizing development and test costs.
SiP Drone Devices
To cope with more functions, the solution is to increase the integration of electronic equipment. To this end, Octavo Systems has developed the OSD32MP15x family of self-contained computer systems for drones, all in a single package. For example, the OSD32MP157C-512M-BAA is a powerful device that combines more than 100 discrete individual chip components in a single 18 mm x 18 mm ball grid array (BGA) package (Figure 2).

Figure 2: Octavo Systems’ OSD32MP157C-512M-BAA is a complete drone system in a single package that combines more than 100 discrete chip components in an 18 mm x 18 mm package. (Image credit: Octavo Systems)

The OSD32MP157C-512M-BAA features two Arm® Cortex®-A7 cores running at 800 megahertz (MHz) (Figure 3). This provides enough processing power for extremely high-performance drones, and the ability to seamlessly process sensor data while simultaneously sending precise and constantly varying Pulse Width Modulation (PWM) signals to power the BLDC propeller motors Powered by four drives. Each Cortex-A7 core contains 33 KB of L1 instruction cache and 32 KB of L2 data cache. These cores share 256 KB of L2 cache. Flight control firmware can be recursive, and this amount of cache speeds up navigation and sensor fusion processing considerably.
The additional third processor is a 209 MHz Arm Cortex-M4 with a floating point unit (FPU), which is also in the package and can be used for auxiliary processing such as managing the camera, monitoring the battery and controlling Wi-Fi communications. Three eMMC / SD card connectors can be used to connect external flash memory cards such as microSD storage. This is suitable for loading firmware into SiPs, as well as storing camera photos and videos, flight data records, event logs, and MEMS sensor logs.
Additional memory for the processor core includes 256 KB of system RAM and 384 KB of microcontroller RAM. In addition, there is 4 KB of battery-backed RAM and 3 KB of one-time programmable (OTP) memory for device customization, such as drone serial numbers or option packages.
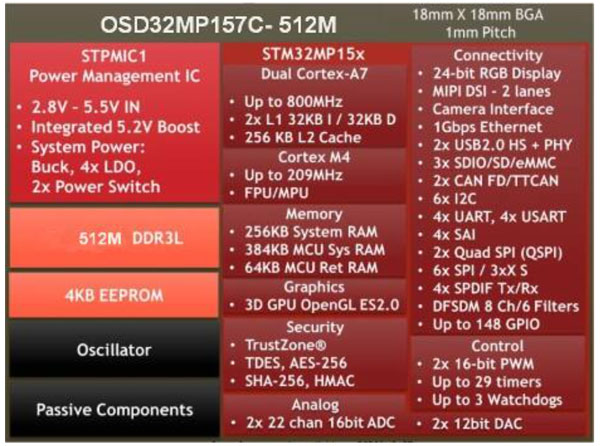
Figure 3: The OSD32MP157C-512M from Octavo Systems is a highly integrated single-device computer for high-performance unmanned aerial systems. (Image credit: Octavo Systems)

The external Flash program memory interface consists of two QSPI interfaces and a 16-bit external NAND Flash interface that supports 8-bit Error Correcting Code (ECC). This allows easy access to external flash memory while protecting against memory corruption or tampering.
Two USB 2.0 high-speed interfaces are available for device configuration and debugging, and for external USB flash memory if additional data storage is required.
512 MB of high-speed DDR3L DRAM is available as program memory for the onboard Cortex core. This DRAM can be loaded from any external flash interface at boot time. This provides sufficient program memory for high performance flight data firmware. It is possible for any external memory interface to run out of program memory, but firmware always executes much faster than DRAM runs out.
4 KB of EEPROM can be used to store sensor calibration data, flight control constants and flight log data. A memory protection feature prevents accidental writes to protected EEPROM.
Several safety functions ensure the safety of the system. The Arm TrustZone module and support for AES-256 and SHA-256 encryption can be used to ensure firmware integrity during updates and to encrypt data on external flash cards. The OSD32MP157C-512M supports Secure Boot for firmware security and a secure Real Time Clock (RTC) to prevent tampering with the drone’s time base.
A variety of serial ports include six SPI, six I2C, four UARTs, and four USART interfaces for connecting MEMS sensors and GPS modules. Two independent 22-channel 16-bit analog-to-digital converters (ADCs) can interface with analog sensors such as thermistors and wind speed sensors, which can also perform current sensing and closed-loop motor control. Three I2S interfaces can connect audio devices such as speakers or buzzers. The camera interface easily connects to most RGB camera modules.
In addition, the OSD32MP157C-512M integrates all discrete components required by the system, including resistors, capacitors, inductors, and ferrite beads. This minimizes the use of external discrete components when building UAV systems.
For PWM motor control, the OSD32MP157C-512M includes two 16-bit advanced motor control timers, fifteen 16-bit timers and two 32-bit timers. This provides enough PWM signal to control the BLDC propeller motors with high accuracy, as well as control any actuators such as camera positioning motors or robotic arms.
Powering the OSD32MP15x
The OSD32MP157C-512M requires only a single 2.8V to 5.5V power supply, making it suitable for use with a standard 3.7V Li-Ion battery. An internal power management chip provides the necessary voltages for all independent internal components. The OSD32MP157C-512M can draw up to 2 amps (A) when both the Cortex-A7 core and the Cortex-M4 are running at maximum clock speed and all peripherals are working. Due to the high level of integration and numerous operating options, it is not possible to estimate typical current consumption scenarios, it is up to the developer to determine the current consumption for a specific application.
The OSD32MP157C-512M consumes less current than using discrete components to achieve the same function on a circuit board. This is mainly due to the fact that using a single die rather than packaged components in a compact packaged SiP can greatly reduce leakage currents, while also reducing power loss due to printed circuit board trace resistance.
The OSD32MP15x family has Electrostatic Discharge (ESD) ratings of ±1000 Volts Human Body Model (HBM) and ±500 Volts Charged Device Model (CDM). Therefore, extreme care must be taken when handling this device. It is strongly recommended to never touch the ball grid contacts with your fingers, and to grip the edge of the device only when necessary. In addition, the OSD32MP15x family of SiP devices are also sensitive to moisture. Sealing the drone electronics is recommended, and is generally a good idea for drone electronics as they may come into contact with high levels of moisture, water vapor, clouds or rain.
To enhance the performance of the drone, Octavo Systems offers the OSD3358-1G-ISM SiP device. The device is functionally similar to the OSD32MP157, but includes a more powerful dual-gigahertz (GHz) Cortex-A8 with 1 GB of DRAM in a 21 mm x 21 mm BGA package. The additional Cortex-M4 processor is not included due to the high performance of the two Cortex-A8 cores.
Octavo SiP Development
For code development, Octavo provides the flexible OSD32MP1-BRK prototyping platform board (Figure 4). The evaluation board contains the OSD32MP157C-512M SiP and expansion headers for connecting 106 digital I/Os and external peripheral signals.
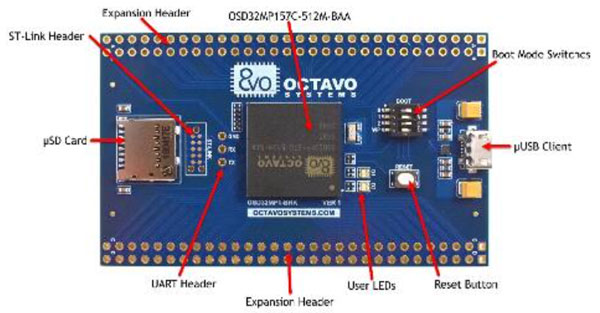
Figure 4: Octavo’s OSD32MP1-BRK is a flexible prototyping platform for the OSD32MP15x family of SiP drone devices. It has a slot for a microSD card and a micro USB port for development and debugging. (Image credit: Octavo Systems)

The development board can use the microSD card slot to load external flash program memory into the DRAM of the OSD32MP517-512M. The micro USB port can be used for development and firmware debugging, and can also power the development board. The boot mode switch determines whether the device will boot from a microSD card or from any external memory interface available on the expansion header.
Summarize
As drone manufacturers continue to improve system capabilities, developers are increasingly challenged to deliver these capabilities while minimizing power consumption and cost for the best end-user experience.
As shown above, a single-device high-performance SiP drone computer has a very high level of integration. This simplifies the design process, while also making the drone lighter and easier to balance, resulting in lower current consumption and longer flight time, a requirement that is highly valued by end users.
Author: Bill Giovino
As more battery-powered drones take to the skies, drone manufacturers face intense competitive pressure to expand the functionality and performance of their designs while minimizing power consumption for longer flight times. To meet market demands, designers continue to add more sophisticated and accurate accelerometers and gyroscopes, and upgrade associated firmware to take advantage of the improved sensors. The physical capabilities of drones are also gradually expanding to include onboard bags and onboard equipment, which requires improved stability and airbraking procedures to deal with the increased weight.
The problem for designers is that the increased weight and computing demands of drones increase power consumption, which in turn reduces flight time for a given battery size. In addition, other features, functions, and associated electronics add to development time and test costs.
Improving integration is the solution. This article will introduce Octavo Systems’ System-in-Package (SiP) solution, which is almost a tiny drone computer. This article will show how to take advantage of the features of this self-contained solution to save significant space and weight to extend flight time, while reducing bill of materials (BOM) and development time, inventory and testing costs.
drone technology
The range of applications for drones continues to expand, from small consumer-facing drones with cameras for family photos or friendly matches, to more challenging roles such as delivering packages for couriers, tracking for ranchers Livestock, monitoring crops for farmers, monitoring shoreline changes for environmental workers, and assisting first responders in search and rescue operations, to name a few. Regardless of the application, battery life in relation to flight time is one of the most critical factors in choosing a drone.
Battery life is obviously related to the weight of the drone, so the drone needs to use the lightest possible materials and be able to hold the frame of the aircraft under the stresses and strains of powered flight. This focus on lightweighting extends from structural integrity all the way to the electronics that control the drone.
For proper flight dynamics, the drone must be properly balanced by evenly distributing the weight of the frame and onboard electronics. The smaller the electronics, the easier it is to balance the weight of the drone. Ideally, the center of gravity should be at the physical center of the drone. Any weight imbalance, no matter how small, must be compensated by adjusting the RPM of the propellers, which over time consumes extra power and wastes the user’s valuable flight time.
Consumer drones and most commercial drones use Wi-Fi technology for control and data transmission. The farther the drone flies, the more power the Wi-Fi radio has to put out to keep in touch with the controller, another big drain on the battery.
UAV Sensors and Processing
While drone makers seek to reduce system weight and cost, users crave more functionality and performance, making drones and their firmware even more complex. This would increase the amount and weight of onboard electronics, and would also affect the balance of the drone.
For example, drones typically use a variety of microelectromechanical systems (MEMS) and other sensors to maintain steady flight while monitoring heading and speed (Figure 1). The Global Positioning System (GPS) module can be used to determine the bearing and orientation of the aircraft; the gyroscope can be used to measure pitch and yaw; the accelerometer can be used to measure the acceleration and impact of the drone; and the barometer can be used to measure the air pressure to help determine the current Optimal propeller speed in atmospheric conditions – increase rotor speed when air pressure is low, and decrease speed when air pressure is high; cameras and proximity sensors enable obstacle detection and avoidance. Also, for safety reasons, multiple redundant sensors may be used.
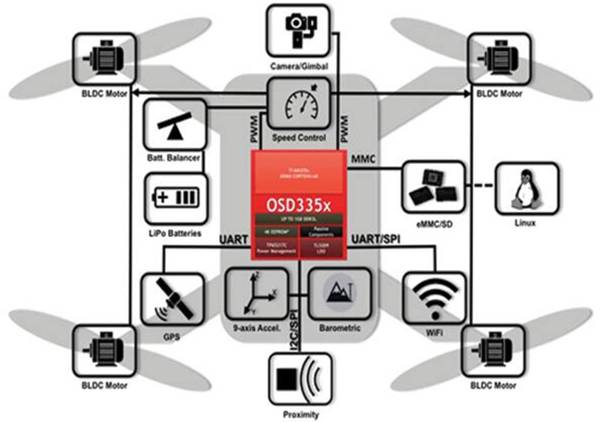
Figure 1: Modern quadcopters have a variety of MEMS sensors, at least one camera, an external memory card for microcontroller firmware or to store photos, and motor drivers to drive the propellers. (Image credit: Octavo Systems)
All outputs from these sensors are fed to the microcontroller that operates the drone. The microcontroller must process all these sensor inputs and use them to determine the most efficient way to power the power-hungry brushless DC (BLDC) motors that drive the propellers. However, as sensor technology advances year by year, drone manufacturers continue to fit the newest, most accurate, and most sophisticated sensors onto the latest drones. This requires more complex firmware to take full advantage of the enhanced capabilities of these sensors. Also, flight control firmware is improving all the time, especially for autonomous drones. All of these improvements not only increase the amount of firmware, but also require increased processing power and a substantial increase in memory to process data accurately.
The expansion of electronic devices and functions presents engineers with a challenge to design small form factor solutions that consume less power to meet growing demands while minimizing development and test costs.
SiP Drone Devices
To cope with more functions, the solution is to increase the integration of electronic equipment. To this end, Octavo Systems has developed the OSD32MP15x family of self-contained computer systems for drones, all in a single package. For example, the OSD32MP157C-512M-BAA is a powerful device that combines more than 100 discrete individual chip components in a single 18 mm x 18 mm ball grid array (BGA) package (Figure 2).

Figure 2: Octavo Systems’ OSD32MP157C-512M-BAA is a complete drone system in a single package that combines more than 100 discrete chip components in an 18 mm x 18 mm package. (Image credit: Octavo Systems)
The OSD32MP157C-512M-BAA features two Arm® Cortex®-A7 cores running at 800 megahertz (MHz) (Figure 3). This provides enough processing power for extremely high-performance drones, and the ability to seamlessly process sensor data while simultaneously sending precise and constantly varying Pulse Width Modulation (PWM) signals to power the BLDC propeller motors Powered by four drives. Each Cortex-A7 core contains 33 KB of L1 instruction cache and 32 KB of L2 data cache. These cores share 256 KB of L2 cache. Flight control firmware can be recursive, and this amount of cache speeds up navigation and sensor fusion processing considerably.
The additional third processor is a 209 MHz Arm Cortex-M4 with a floating point unit (FPU), which is also in the package and can be used for auxiliary processing such as managing the camera, monitoring the battery and controlling Wi-Fi communications. Three eMMC / SD card connectors can be used to connect external flash memory cards such as microSD storage. This is suitable for loading firmware into SiPs, as well as storing camera photos and videos, flight data records, event logs, and MEMS sensor logs.
Additional memory for the processor core includes 256 KB of system RAM and 384 KB of microcontroller RAM. In addition, there is 4 KB of battery-backed RAM and 3 KB of one-time programmable (OTP) memory for device customization, such as drone serial numbers or option packages.
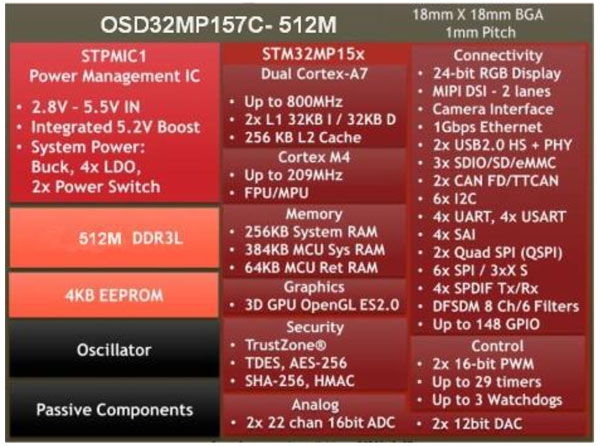
Figure 3: The OSD32MP157C-512M from Octavo Systems is a highly integrated single-device computer for high-performance unmanned aerial systems. (Image credit: Octavo Systems)
The external Flash program memory interface consists of two QSPI interfaces and a 16-bit external NAND Flash interface that supports 8-bit Error Correcting Code (ECC). This allows easy access to external flash memory while protecting against memory corruption or tampering.
Two USB 2.0 high-speed interfaces are available for device configuration and debugging, and for external USB flash memory if additional data storage is required.
512 MB of high-speed DDR3L DRAM is available as program memory for the onboard Cortex core. This DRAM can be loaded from any external flash interface at boot time. This provides sufficient program memory for high performance flight data firmware. It is possible for any external memory interface to run out of program memory, but firmware always executes much faster than DRAM runs out.
4 KB of EEPROM can be used to store sensor calibration data, flight control constants and flight log data. A memory protection feature prevents accidental writes to protected EEPROM.
Several safety functions ensure the safety of the system. The Arm TrustZone module and support for AES-256 and SHA-256 encryption can be used to ensure firmware integrity during updates and to encrypt data on external flash cards. The OSD32MP157C-512M supports Secure Boot for firmware security and a secure Real Time Clock (RTC) to prevent tampering with the drone’s time base.
A variety of serial ports include six SPI, six I2C, four UARTs, and four USART interfaces for connecting MEMS sensors and GPS modules. Two independent 22-channel 16-bit analog-to-digital converters (ADCs) can interface with analog sensors such as thermistors and wind speed sensors, which can also perform current sensing and closed-loop motor control. Three I2S interfaces can connect audio devices such as speakers or buzzers. The camera interface easily connects to most RGB camera modules.
In addition, the OSD32MP157C-512M integrates all discrete components required by the system, including resistors, capacitors, inductors, and ferrite beads. This minimizes the use of external discrete components when building UAV systems.
For PWM motor control, the OSD32MP157C-512M includes two 16-bit advanced motor control timers, fifteen 16-bit timers and two 32-bit timers. This provides enough PWM signal to control the BLDC propeller motors with high accuracy, as well as control any actuators such as camera positioning motors or robotic arms.
Powering the OSD32MP15x
The OSD32MP157C-512M requires only a single 2.8V to 5.5V power supply, making it suitable for use with a standard 3.7V Li-Ion battery. An internal power management chip provides the necessary voltages for all independent internal components. The OSD32MP157C-512M can draw up to 2 amps (A) when both the Cortex-A7 core and the Cortex-M4 are running at maximum clock speed and all peripherals are working. Due to the high level of integration and numerous operating options, it is not possible to estimate typical current consumption scenarios, it is up to the developer to determine the current consumption for a specific application.
The OSD32MP157C-512M consumes less current than using discrete components to achieve the same function on a circuit board. This is mainly due to the fact that using a single die rather than packaged components in a compact packaged SiP can greatly reduce leakage currents, while also reducing power loss due to printed circuit board trace resistance.
The OSD32MP15x family has Electrostatic Discharge (ESD) ratings of ±1000 Volts Human Body Model (HBM) and ±500 Volts Charged Device Model (CDM). Therefore, extreme care must be taken when handling this device. It is strongly recommended to never touch the ball grid contacts with your fingers, and to grip the edge of the device only when necessary. In addition, the OSD32MP15x family of SiP devices are also sensitive to moisture. Sealing the drone electronics is recommended, and is generally a good idea for drone electronics as they may come into contact with high levels of moisture, water vapor, clouds or rain.
To enhance the performance of the drone, Octavo Systems offers the OSD3358-1G-ISM SiP device. The device is functionally similar to the OSD32MP157, but includes a more powerful dual-gigahertz (GHz) Cortex-A8 with 1 GB of DRAM in a 21 mm x 21 mm BGA package. The additional Cortex-M4 processor is not included due to the high performance of the two Cortex-A8 cores.
Octavo SiP Development
For code development, Octavo provides the flexible OSD32MP1-BRK prototyping platform board (Figure 4). The evaluation board contains the OSD32MP157C-512M SiP and expansion headers for connecting 106 digital I/Os and external peripheral signals.
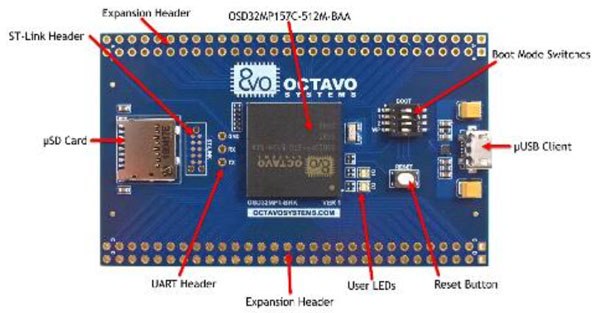
Figure 4: Octavo’s OSD32MP1-BRK is a flexible prototyping platform for the OSD32MP15x family of SiP drone devices. It has a slot for a microSD card and a micro USB port for development and debugging. (Image credit: Octavo Systems)
The development board can use the microSD card slot to load external flash program memory into the DRAM of the OSD32MP517-512M. The micro USB port can be used for development and firmware debugging, and can also power the development board. The boot mode switch determines whether the device will boot from a microSD card or from any external memory interface available on the expansion header.
Summarize
As drone manufacturers continue to improve system capabilities, developers are increasingly challenged to deliver these capabilities while minimizing power consumption and cost for the best end-user experience.
As shown above, a single-device high-performance SiP drone computer has a very high level of integration. This simplifies the design process, while also making the drone lighter and easier to balance, resulting in lower current consumption and longer flight time, a requirement that is highly valued by end users.
View more : IGBT modules | LCD displays | Electronic Components