По мере того, как все больше дронов с батарейным питанием поднимается в небо, производители дронов сталкиваются с сильным конкурентным давлением, требующим расширения функциональности и производительности своих конструкций при минимизации энергопотребления для увеличения времени полета. Чтобы соответствовать требованиям рынка, разработчики продолжают добавлять более сложные и точные акселерометры и гироскопы, а также обновлять встроенное ПО, чтобы использовать преимущества улучшенных датчиков. Физические возможности дронов также постепенно расширяются за счет бортовых сумок и бортового оборудования, что требует улучшенной устойчивости и процедур торможения в воздухе, чтобы справиться с возросшим весом.
Автор: Билл Джовино
По мере того, как все больше дронов с батарейным питанием поднимается в небо, производители дронов сталкиваются с сильным конкурентным давлением, требующим расширения функциональности и производительности своих конструкций при минимизации энергопотребления для увеличения времени полета. Чтобы соответствовать требованиям рынка, разработчики продолжают добавлять более сложные и точные акселерометры и гироскопы, а также обновлять встроенное ПО, чтобы использовать преимущества улучшенных датчиков. Физические возможности дронов также постепенно расширяются за счет бортовых сумок и бортового оборудования, что требует улучшенной устойчивости и процедур торможения в воздухе, чтобы справиться с возросшим весом.
Проблема для разработчиков заключается в том, что увеличившийся вес и вычислительные требования дронов увеличивают энергопотребление, что, в свою очередь, сокращает время полета для данного размера батареи. Кроме того, другие характеристики, функции и связанная с ними электроника увеличивают время разработки и затраты на тестирование.
Улучшение интеграции является решением. В этой статье будет представлено решение System-in-Package (SiP) от Octavo Systems, которое представляет собой почти крошечный дрон-компьютер. В этой статье будет показано, как воспользоваться преимуществами этого автономного решения, чтобы сэкономить значительное пространство и вес для увеличения времени полета, одновременно сокращая спецификацию материалов (BOM) и время разработки, запасы и затраты на тестирование.
трутень technology
Спектр приложений для дронов продолжает расширяться: от небольших дронов с камерами для семейных фотографий или дружеских матчей до более сложных задач, таких как доставка посылок для курьеров, отслеживание скота для владельцев ранчо, мониторинг посевов для фермеров, мониторинг изменений береговой линии для экологических работников и помощь службам быстрого реагирования в поисково-спасательных операциях, и это лишь некоторые из них. Независимо от приложения, время работы от батареи по отношению ко времени полета является одним из наиболее важных факторов при выборе дрона.
Срок службы батареи, очевидно, связан с весом дрона, поэтому дрон должен использовать как можно более легкие материалы и быть в состоянии удерживать раму дрона в условиях нагрузок и нагрузок при полете с двигателем. Этот акцент на облегчении распространяется от структурной целостности до электроники, которая управляет дроном.
Для правильной динамики полета дрон необходимо правильно сбалансировать, равномерно распределив вес рамы и бортовой электроники. Чем меньше электроника, тем легче сбалансировать вес дрона. В идеале центр тяжести должен находиться в физическом центре дрона. Любой дисбаланс веса, каким бы малым он ни был, должен быть компенсирован регулировкой числа оборотов пропеллеров, что со временем потребляет дополнительную мощность и тратит впустую ценное время полета пользователя.
Потребительские дроны и большинство коммерческих дронов используют Wi-Fi технологии управления и передачи данных. Чем дальше летит дрон, тем больше энергии должен выдавать радиомодуль Wi-Fi, чтобы поддерживать связь с контроллером, а это еще один большой расход заряда батареи.
Датчики БПЛА и обработка
В то время как производители дронов стремятся уменьшить вес и стоимость систем, пользователи жаждут большей функциональности и производительности, что делает дроны и их прошивку еще более сложными. Это увеличит количество и вес бортовой электроники, а также повлияет на баланс дрона.
Например, дроны обычно используют различные микроэлектромеханические системы (МЭМС) и другие датчики для поддержания устойчивого полета, одновременно отслеживая курс и скорость (рис. 1). Глобальная система позиционирования (GPS) модуль может использоваться для определения пеленга и ориентации самолета; гироскоп можно использовать для измерения тангажа и рыскания; акселерометр можно использовать для измерения ускорения и удара дрона; а барометр можно использовать для измерения давления воздуха, чтобы определить текущую оптимальную скорость винта в атмосферных условиях: увеличивайте скорость ротора, когда давление воздуха низкое, и уменьшайте скорость, когда давление воздуха высокое; камеры и датчики приближения позволяют обнаруживать препятствия и избегать их. Кроме того, по соображениям безопасности можно использовать несколько резервных датчиков.
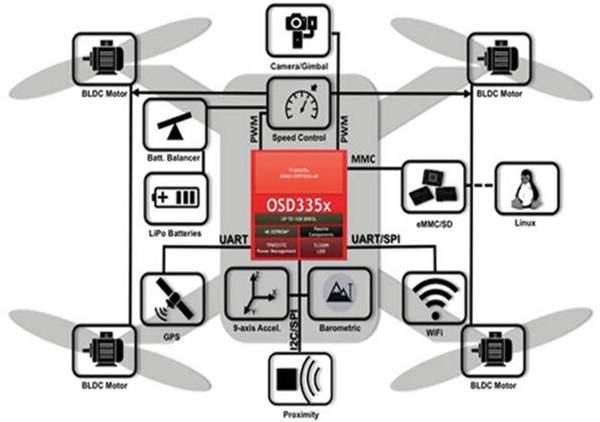
Рисунок 1: Современные квадрокоптеры имеют множество датчиков MEMS, как минимум одну камеру, внешнюю карту памяти для прошивки микроконтроллера или для хранения фотографий, а также драйверы двигателей для привода пропеллеров. (Изображение предоставлено Octavo Systems)

Все выходные данные этих датчиков поступают на микроконтроллер, управляющий дроном. Микроконтроллер должен обрабатывать все эти входные данные датчиков и использовать их для определения наиболее эффективного способа питания энергоемких бесколлекторных двигателей постоянного тока (BLDC), которые приводят в движение пропеллеры. Однако по мере того, как технологии датчиков развиваются год за годом, производители дронов продолжают устанавливать новейшие, самые точные и самые сложные датчики на новейшие дроны. Это требует более сложной прошивки, чтобы в полной мере использовать расширенные возможности этих датчиков. Кроме того, прошивка управления полетом постоянно совершенствуется, особенно для автономных дронов. Все эти улучшения не только увеличивают количество микропрограмм, но также требуют увеличения вычислительной мощности и значительного увеличения объема памяти для точной обработки данных.
Расширение Электронный устройства и функции ставит перед инженерами задачу разработки решений малого форм-фактора, которые потребляют меньше энергии для удовлетворения растущих потребностей при минимальных затратах на разработку и тестирование.
SiP-дроны
Чтобы справиться с большим количеством функций, решение состоит в том, чтобы увеличить интеграцию электронного оборудования. С этой целью Octavo Systems разработала семейство автономных компьютерных систем OSD32MP15x для дронов в одном корпусе. Например, OSD32MP157C-512M-BAA представляет собой мощное устройство, объединяющее более 100 дискретных отдельных микросхем. компоненты в одном корпусе с шариковой решеткой (BGA) размером 18 мм x 18 мм (рис. 2).

Рисунок 2: OSD32MP157C-512M-BAA от Octavo Systems — это полноценная система для дронов в едином корпусе, объединяющая более 100 дискретных микросхем в корпусе размером 18 мм x 18 мм. (Изображение предоставлено Octavo Systems)

OSD32MP157C-512M-BAA имеет два ядра Arm® Cortex®-A7, работающих на частоте 800 мегагерц (МГц) (рис. 3). Это обеспечивает достаточную вычислительную мощность для чрезвычайно высокопроизводительных дронов и возможность беспрепятственно обрабатывать данные датчиков, одновременно отправляя точные и постоянно меняющиеся сигналы широтно-импульсной модуляции (ШИМ) для питания винтовых двигателей постоянного тока BLDC, работающих от четырех приводов. Каждое ядро Cortex-A7 содержит 33 КБ кэша инструкций L1 и 32 КБ кэша данных L2. Эти ядра совместно используют 256 КБ кэш-памяти L2. Прошивка управления полетом может быть рекурсивной, и такой объем кэш-памяти значительно ускоряет навигацию и обработку слияния датчиков.
Дополнительный третий процессор — это Arm Cortex-M209 с частотой 4 МГц и модулем с плавающей запятой (FPU), который также входит в комплект поставки и может использоваться для вспомогательной обработки, такой как управление камерой, мониторинг батареи и управление связью по Wi-Fi. Три разъема для карт eMMC/SD можно использовать для подключения внешних карт флэш-памяти, таких как хранилище microSD. Это подходит для загрузки встроенного программного обеспечения в SiP, а также для хранения фотографий и видео с камер, записей полетных данных, журналов событий и журналов датчиков MEMS.
Дополнительная память для ядра процессора включает 256 КБ системной ОЗУ и 384 КБ ОЗУ микроконтроллера. Кроме того, имеется 4 КБ ОЗУ с батарейным питанием и 3 КБ одноразовой программируемой (OTP) памяти для настройки устройства, например серийных номеров дронов или дополнительных пакетов.
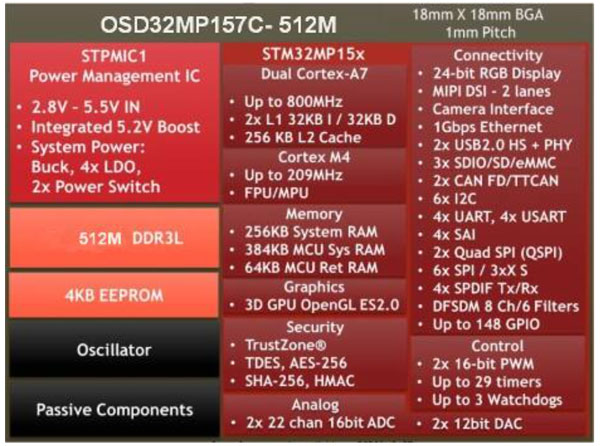
Рис. 3. OSD32MP157C-512M от Octavo Systems — высокоинтегрированный компьютер с одним устройством для высокопроизводительных беспилотных авиационных систем. (Изображение предоставлено Octavo Systems)

Интерфейс внешней флэш-памяти программ состоит из двух интерфейсов QSPI и 16-разрядного внешнего интерфейса флэш-памяти NAND, который поддерживает 8-разрядный код исправления ошибок (ECC). Это обеспечивает легкий доступ к внешней флэш-памяти, защищая ее от повреждения или несанкционированного доступа.
Доступны два высокоскоростных интерфейса USB 2.0 для настройки и отладки устройства, а также для внешней флэш-памяти USB, если требуется дополнительное хранилище данных.
512 МБ высокоскоростной памяти DDR3L DRAM доступны в качестве программной памяти для встроенного ядра Cortex. Эта DRAM может быть загружена с любого внешнего интерфейса флэш-памяти во время загрузки. Это обеспечивает достаточную программную память для высокопроизводительной прошивки полетных данных. Любой интерфейс внешней памяти может исчерпать память программ, но прошивка всегда выполняется намного быстрее, чем заканчивается DRAM.
4 КБ EEPROM можно использовать для хранения данных калибровки датчиков, констант управления полетом и данных журнала полетов. Функция защиты памяти предотвращает случайную запись в защищенную EEPROM.
Несколько функций безопасности обеспечивают безопасность системы. Модуль Arm TrustZone и поддержка шифрования AES-256 и SHA-256 могут использоваться для обеспечения целостности прошивки во время обновлений и для шифрования данных на внешних флэш-картах. OSD32MP157C-512M поддерживает безопасную загрузку для защиты встроенного ПО и защищенные часы реального времени (RTC) для предотвращения несанкционированного вмешательства в базу времени дрона.
Различные последовательные порты включают шесть SPI, шесть I2C, четыре UART и четыре интерфейса USART для подключения датчиков MEMS и модулей GPS. Два независимых 22-канальных 16-разрядных аналого-цифровых преобразователя (АЦП) могут взаимодействовать с аналоговыми датчиками, такими как термисторы и датчики скорости ветра, которые также могут выполнять измерение тока и управление двигателем с обратной связью. Три интерфейса I2S могут подключать аудиоустройства, такие как динамики или зуммеры. Интерфейс камеры легко подключается к большинству модулей RGB-камеры.
Кроме того, OSD32MP157C-512M объединяет все дискретные компоненты, необходимые системе, включая резисторы, конденсаторы, катушки индуктивности и ферритовые кольца. Это сводит к минимуму использование внешних дискретных компонентов при создании систем БПЛА.
Для ШИМ-управления двигателем OSD32MP157C-512M включает в себя два 16-разрядных усовершенствованных таймера управления двигателем, пятнадцать 16-разрядных таймеров и два 32-разрядных таймера. Это обеспечивает достаточный сигнал ШИМ для управления двигателями винтов постоянного тока с высокой точностью, а также для управления любыми исполнительными механизмами, такими как двигатели позиционирования камеры или роботизированные руки.
Питание OSD32MP15x
Для OSD32MP157C-512M требуется только один источник питания от 2.8 В до 5.5 В, что делает его пригодным для использования со стандартной литий-ионной батареей 3.7 В. Внутренний чип управления питанием обеспечивает необходимое напряжение для всех независимых внутренних компонентов. OSD32MP157C-512M может потреблять до 2 ампер (А), когда ядро Cortex-A7 и Cortex-M4 работают на максимальной тактовой частоте и работают все периферийные устройства. Из-за высокого уровня интеграции и многочисленных вариантов работы невозможно оценить типовые сценарии потребления тока, определение потребления тока для конкретного приложения остается за разработчиком.
OSD32MP157C-512M потребляет меньше тока, чем при использовании дискретных компонентов для достижения той же функции на печатной плате. Это в основном связано с тем, что использование одного кристалла, а не упакованных компонентов в компактном корпусе SiP, может значительно снизить токи утечки, а также уменьшить потери мощности из-за сопротивления дорожек печатной платы.
Семейство OSD32MP15x имеет рейтинг электростатического разряда (ESD) ± 1000 вольт для модели человеческого тела (HBM) и ± 500 вольт для модели заряженного устройства (CDM). Поэтому при обращении с этим устройством необходимо соблюдать крайнюю осторожность. Настоятельно рекомендуется никогда не прикасаться пальцами к контактам шариковой сетки и браться за край устройства только в случае необходимости. Кроме того, семейство SiP-устройств OSD32MP15x также чувствительно к влаге. Рекомендуется герметизировать электронику дрона, и, как правило, это хорошая идея для электроники дрона, поскольку она может вступить в контакт с высоким уровнем влаги, водяным паром, облаками или дождем.
Для повышения производительности дрона Octavo Systems предлагает SiP-устройство OSD3358-1G-ISM. Устройство функционально похоже на OSD32MP157, но включает в себя более мощный двухгигагерцовый (ГГц) Cortex-A8 с 1 ГБ DRAM в корпусе BGA 21 мм x 21 мм. Дополнительный процессор Cortex-M4 не включен из-за высокой производительности двух ядер Cortex-A8.
Разработка Octavo SiP
Для разработки кода Octavo предоставляет гибкую плату платформы прототипирования OSD32MP1-BRK (рис. 4). Оценочная плата содержит SiP OSD32MP157C-512M и разъемы расширения для подключения 106 цифровых входов/выходов и внешних периферийных сигналов.
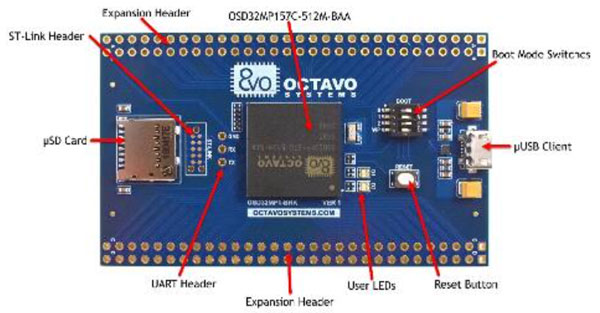
Рисунок 4: OSD32MP1-BRK от Octavo — это гибкая платформа для прототипирования семейства OSD32MP15x беспилотных летательных аппаратов SiP. Он имеет слот для карты microSD и порт micro USB для разработки и отладки. (Изображение предоставлено Octavo Systems)

Плата разработки может использовать слот для карты microSD для загрузки внешней флэш-памяти программ в DRAM OSD32MP517-512M. Порт micro USB можно использовать для разработки и отладки прошивки, а также для питания макетной платы. Переключатель режима загрузки определяет, будет ли устройство загружаться с карты microSD или с любого внешнего интерфейса памяти, доступного в заголовке расширения.
Суммировать
Поскольку производители дронов продолжают улучшать системные возможности, перед разработчиками все чаще ставится задача реализовать эти возможности, сводя к минимуму энергопотребление и затраты для наилучшего взаимодействия с конечным пользователем.
Как показано выше, высокопроизводительный дрон-компьютер SiP с одним устройством имеет очень высокий уровень интеграции. Это упрощает процесс проектирования, а также делает дрон легче и легче балансировать, что приводит к меньшему потреблению тока и большему времени полета, что высоко ценится конечными пользователями.
Автор: Билл Джовино
По мере того, как все больше дронов с батарейным питанием поднимается в небо, производители дронов сталкиваются с сильным конкурентным давлением, требующим расширения функциональности и производительности своих конструкций при минимизации энергопотребления для увеличения времени полета. Чтобы соответствовать требованиям рынка, разработчики продолжают добавлять более сложные и точные акселерометры и гироскопы, а также обновлять встроенное ПО, чтобы использовать преимущества улучшенных датчиков. Физические возможности дронов также постепенно расширяются за счет бортовых сумок и бортового оборудования, что требует улучшенной устойчивости и процедур торможения в воздухе, чтобы справиться с возросшим весом.
Проблема для разработчиков заключается в том, что увеличившийся вес и вычислительные требования дронов увеличивают энергопотребление, что, в свою очередь, сокращает время полета для данного размера батареи. Кроме того, другие характеристики, функции и связанная с ними электроника увеличивают время разработки и затраты на тестирование.
Улучшение интеграции является решением. В этой статье будет представлено решение System-in-Package (SiP) от Octavo Systems, которое представляет собой почти крошечный дрон-компьютер. В этой статье будет показано, как воспользоваться преимуществами этого автономного решения, чтобы сэкономить значительное пространство и вес для увеличения времени полета, одновременно сокращая спецификацию материалов (BOM) и время разработки, запасы и затраты на тестирование.
технология дронов
Спектр приложений для дронов продолжает расширяться: от небольших дронов с камерами для семейных фотографий или дружеских матчей до более сложных задач, таких как доставка посылок для курьеров, отслеживание скота для владельцев ранчо, мониторинг посевов для фермеров, мониторинг изменений береговой линии для экологических работников и помощь службам быстрого реагирования в поисково-спасательных операциях, и это лишь некоторые из них. Независимо от приложения, время работы от батареи по отношению ко времени полета является одним из наиболее важных факторов при выборе дрона.
Срок службы батареи, очевидно, связан с весом дрона, поэтому дрон должен использовать как можно более легкие материалы и быть в состоянии удерживать раму дрона в условиях нагрузок и нагрузок при полете с двигателем. Этот акцент на облегчении распространяется от структурной целостности до электроники, которая управляет дроном.
Для правильной динамики полета дрон необходимо правильно сбалансировать, равномерно распределив вес рамы и бортовой электроники. Чем меньше электроника, тем легче сбалансировать вес дрона. В идеале центр тяжести должен находиться в физическом центре дрона. Любой дисбаланс веса, каким бы малым он ни был, должен быть компенсирован регулировкой числа оборотов пропеллеров, что со временем потребляет дополнительную мощность и тратит впустую ценное время полета пользователя.
Потребительские дроны и большинство коммерческих дронов используют технологию Wi-Fi для управления и передачи данных. Чем дальше летит дрон, тем больше энергии приходится потреблять Wi-Fi-радио, чтобы поддерживать связь с контроллером, а это еще один большой расход заряда аккумулятора.
Датчики БПЛА и обработка
В то время как производители дронов стремятся уменьшить вес и стоимость систем, пользователи жаждут большей функциональности и производительности, что делает дроны и их прошивку еще более сложными. Это увеличит количество и вес бортовой электроники, а также повлияет на баланс дрона.
Например, дроны обычно используют различные микроэлектромеханические системы (МЭМС) и другие датчики для поддержания стабильного полета при отслеживании курса и скорости (рис. 1). Модуль глобальной системы позиционирования (GPS) можно использовать для определения пеленга и ориентации самолета; гироскоп можно использовать для измерения тангажа и рыскания; акселерометр можно использовать для измерения ускорения и удара дрона; а барометр можно использовать для измерения давления воздуха, чтобы помочь определить текущую оптимальную скорость вращения винта в атмосферных условиях — увеличить скорость вращения винта при низком давлении воздуха и уменьшить скорость при высоком давлении воздуха; камеры и датчики приближения позволяют обнаруживать препятствия и избегать их. Кроме того, из соображений безопасности можно использовать несколько дублирующих датчиков.
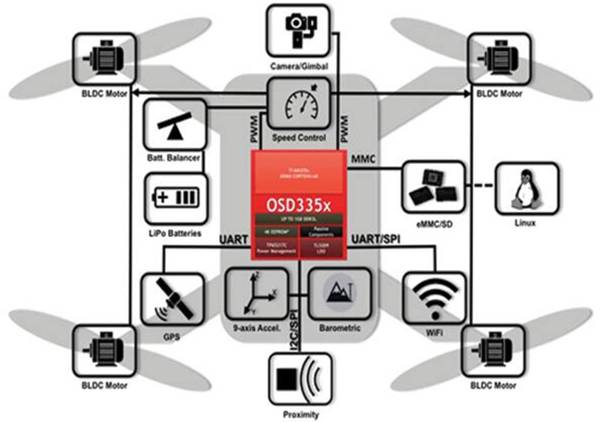
Рисунок 1: Современные квадрокоптеры имеют множество датчиков MEMS, как минимум одну камеру, внешнюю карту памяти для прошивки микроконтроллера или для хранения фотографий, а также драйверы двигателей для привода пропеллеров. (Изображение предоставлено Octavo Systems)
Все выходные данные этих датчиков поступают на микроконтроллер, управляющий дроном. Микроконтроллер должен обрабатывать все эти входные данные датчиков и использовать их для определения наиболее эффективного способа питания энергоемких бесколлекторных двигателей постоянного тока (BLDC), которые приводят в движение пропеллеры. Однако по мере того, как технологии датчиков развиваются год за годом, производители дронов продолжают устанавливать новейшие, самые точные и самые сложные датчики на новейшие дроны. Это требует более сложной прошивки, чтобы в полной мере использовать расширенные возможности этих датчиков. Кроме того, прошивка управления полетом постоянно совершенствуется, особенно для автономных дронов. Все эти улучшения не только увеличивают количество микропрограмм, но также требуют увеличения вычислительной мощности и значительного увеличения объема памяти для точной обработки данных.
Расширение электронных устройств и функций ставит перед инженерами задачу разработки решений малого форм-фактора, которые потребляют меньше энергии для удовлетворения растущих потребностей при минимальных затратах на разработку и тестирование.
SiP-дроны
Чтобы справиться с большим количеством функций, решение состоит в том, чтобы увеличить интеграцию электронного оборудования. С этой целью Octavo Systems разработала семейство автономных компьютерных систем OSD32MP15x для дронов в одном корпусе. Например, OSD32MP157C-512M-BAA представляет собой мощное устройство, объединяющее более 100 дискретных отдельных микросхем в одном корпусе с шариковой решеткой (BGA) размером 18 x 18 мм (рис. 2).

Рисунок 2: OSD32MP157C-512M-BAA от Octavo Systems — это полноценная система для дронов в едином корпусе, объединяющая более 100 дискретных микросхем в корпусе размером 18 мм x 18 мм. (Изображение предоставлено Octavo Systems)
OSD32MP157C-512M-BAA имеет два ядра Arm® Cortex®-A7, работающих на частоте 800 мегагерц (МГц) (рис. 3). Это обеспечивает достаточную вычислительную мощность для чрезвычайно высокопроизводительных дронов и возможность беспрепятственно обрабатывать данные датчиков, одновременно отправляя точные и постоянно меняющиеся сигналы широтно-импульсной модуляции (ШИМ) для питания винтовых двигателей постоянного тока BLDC, работающих от четырех приводов. Каждое ядро Cortex-A7 содержит 33 КБ кэша инструкций L1 и 32 КБ кэша данных L2. Эти ядра совместно используют 256 КБ кэш-памяти L2. Прошивка управления полетом может быть рекурсивной, и такой объем кэш-памяти значительно ускоряет навигацию и обработку слияния датчиков.
Дополнительный третий процессор — это Arm Cortex-M209 с частотой 4 МГц и модулем с плавающей запятой (FPU), который также входит в комплект поставки и может использоваться для вспомогательной обработки, такой как управление камерой, мониторинг батареи и управление связью по Wi-Fi. Три разъема для карт eMMC/SD можно использовать для подключения внешних карт флэш-памяти, таких как хранилище microSD. Это подходит для загрузки встроенного программного обеспечения в SiP, а также для хранения фотографий и видео с камер, записей полетных данных, журналов событий и журналов датчиков MEMS.
Дополнительная память для ядра процессора включает 256 КБ системной ОЗУ и 384 КБ ОЗУ микроконтроллера. Кроме того, имеется 4 КБ ОЗУ с батарейным питанием и 3 КБ одноразовой программируемой (OTP) памяти для настройки устройства, например серийных номеров дронов или дополнительных пакетов.
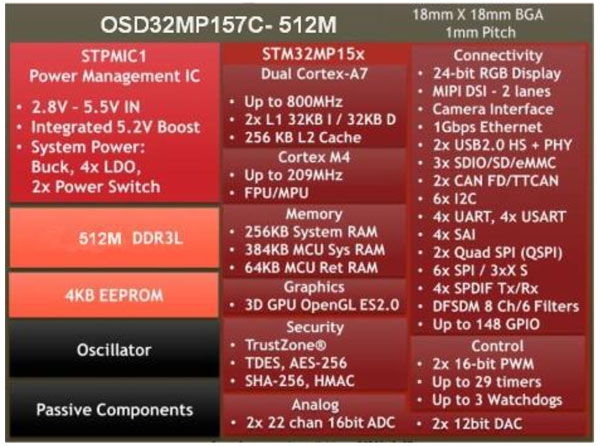
Рис. 3. OSD32MP157C-512M от Octavo Systems — высокоинтегрированный компьютер с одним устройством для высокопроизводительных беспилотных авиационных систем. (Изображение предоставлено Octavo Systems)
Интерфейс внешней флэш-памяти программ состоит из двух интерфейсов QSPI и 16-разрядного внешнего интерфейса флэш-памяти NAND, который поддерживает 8-разрядный код исправления ошибок (ECC). Это обеспечивает легкий доступ к внешней флэш-памяти, защищая ее от повреждения или несанкционированного доступа.
Доступны два высокоскоростных интерфейса USB 2.0 для настройки и отладки устройства, а также для внешней флэш-памяти USB, если требуется дополнительное хранилище данных.
512 МБ высокоскоростной памяти DDR3L DRAM доступны в качестве программной памяти для встроенного ядра Cortex. Эта DRAM может быть загружена с любого внешнего интерфейса флэш-памяти во время загрузки. Это обеспечивает достаточную программную память для высокопроизводительной прошивки полетных данных. Любой интерфейс внешней памяти может исчерпать память программ, но прошивка всегда выполняется намного быстрее, чем заканчивается DRAM.
4 КБ EEPROM можно использовать для хранения данных калибровки датчиков, констант управления полетом и данных журнала полетов. Функция защиты памяти предотвращает случайную запись в защищенную EEPROM.
Несколько функций безопасности обеспечивают безопасность системы. Модуль Arm TrustZone и поддержка шифрования AES-256 и SHA-256 могут использоваться для обеспечения целостности прошивки во время обновлений и для шифрования данных на внешних флэш-картах. OSD32MP157C-512M поддерживает безопасную загрузку для защиты встроенного ПО и защищенные часы реального времени (RTC) для предотвращения несанкционированного вмешательства в базу времени дрона.
Различные последовательные порты включают шесть SPI, шесть I2C, четыре UART и четыре интерфейса USART для подключения датчиков MEMS и модулей GPS. Два независимых 22-канальных 16-разрядных аналого-цифровых преобразователя (АЦП) могут взаимодействовать с аналоговыми датчиками, такими как термисторы и датчики скорости ветра, которые также могут выполнять измерение тока и управление двигателем с обратной связью. Три интерфейса I2S могут подключать аудиоустройства, такие как динамики или зуммеры. Интерфейс камеры легко подключается к большинству модулей RGB-камеры.
Кроме того, OSD32MP157C-512M объединяет все дискретные компоненты, необходимые системе, включая резисторы, конденсаторы, катушки индуктивности и ферритовые кольца. Это сводит к минимуму использование внешних дискретных компонентов при создании систем БПЛА.
Для ШИМ-управления двигателем OSD32MP157C-512M включает в себя два 16-разрядных усовершенствованных таймера управления двигателем, пятнадцать 16-разрядных таймеров и два 32-разрядных таймера. Это обеспечивает достаточный сигнал ШИМ для управления двигателями винтов постоянного тока с высокой точностью, а также для управления любыми исполнительными механизмами, такими как двигатели позиционирования камеры или роботизированные руки.
Питание OSD32MP15x
Для OSD32MP157C-512M требуется только один источник питания от 2.8 В до 5.5 В, что делает его пригодным для использования со стандартной литий-ионной батареей 3.7 В. Внутренний чип управления питанием обеспечивает необходимое напряжение для всех независимых внутренних компонентов. OSD32MP157C-512M может потреблять до 2 ампер (А), когда ядро Cortex-A7 и Cortex-M4 работают на максимальной тактовой частоте и работают все периферийные устройства. Из-за высокого уровня интеграции и многочисленных вариантов работы невозможно оценить типовые сценарии потребления тока, определение потребления тока для конкретного приложения остается за разработчиком.
OSD32MP157C-512M потребляет меньше тока, чем при использовании дискретных компонентов для достижения той же функции на печатной плате. Это в основном связано с тем, что использование одного кристалла, а не упакованных компонентов в компактном корпусе SiP, может значительно снизить токи утечки, а также уменьшить потери мощности из-за сопротивления дорожек печатной платы.
Семейство OSD32MP15x имеет рейтинг электростатического разряда (ESD) ± 1000 вольт для модели человеческого тела (HBM) и ± 500 вольт для модели заряженного устройства (CDM). Поэтому при обращении с этим устройством необходимо соблюдать крайнюю осторожность. Настоятельно рекомендуется никогда не прикасаться пальцами к контактам шариковой сетки и браться за край устройства только в случае необходимости. Кроме того, семейство SiP-устройств OSD32MP15x также чувствительно к влаге. Рекомендуется герметизировать электронику дрона, и, как правило, это хорошая идея для электроники дрона, поскольку она может вступить в контакт с высоким уровнем влаги, водяным паром, облаками или дождем.
Для повышения производительности дрона Octavo Systems предлагает SiP-устройство OSD3358-1G-ISM. Устройство функционально похоже на OSD32MP157, но включает в себя более мощный двухгигагерцовый (ГГц) Cortex-A8 с 1 ГБ DRAM в корпусе BGA 21 мм x 21 мм. Дополнительный процессор Cortex-M4 не включен из-за высокой производительности двух ядер Cortex-A8.
Разработка Octavo SiP
Для разработки кода Octavo предоставляет гибкую плату платформы прототипирования OSD32MP1-BRK (рис. 4). Оценочная плата содержит SiP OSD32MP157C-512M и разъемы расширения для подключения 106 цифровых входов/выходов и внешних периферийных сигналов.
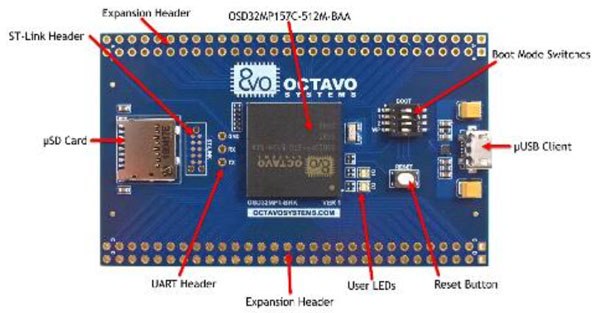
Рисунок 4: OSD32MP1-BRK от Octavo — это гибкая платформа для прототипирования семейства OSD32MP15x беспилотных летательных аппаратов SiP. Он имеет слот для карты microSD и порт micro USB для разработки и отладки. (Изображение предоставлено Octavo Systems)
Плата разработки может использовать слот для карты microSD для загрузки внешней флэш-памяти программ в DRAM OSD32MP517-512M. Порт micro USB можно использовать для разработки и отладки прошивки, а также для питания макетной платы. Переключатель режима загрузки определяет, будет ли устройство загружаться с карты microSD или с любого внешнего интерфейса памяти, доступного в заголовке расширения.
Суммировать
Поскольку производители дронов продолжают улучшать системные возможности, перед разработчиками все чаще ставится задача реализовать эти возможности, сводя к минимуму энергопотребление и затраты для наилучшего взаимодействия с конечным пользователем.
Как показано выше, высокопроизводительный дрон-компьютер SiP с одним устройством имеет очень высокий уровень интеграции. Это упрощает процесс проектирования, а также делает дрон легче и легче балансировать, что приводит к меньшему потреблению тока и большему времени полета, что высоко ценится конечными пользователями.
Посмотреть больше: Модули IGBT | ЖК-дисплеи | Электронные компоненты