電気モーターは世界を形作ってきましたし、今後もあらゆるレベルでそうあり続けます。 家庭で見かける小型モーターから、頑丈な産業用モーターまで多岐にわたります。 環境面でも財務面でもエネルギーコストに対する意識が高まるにつれ、モーター駆動システムの効率を高め、運用コストと生産コストを削減する必要があります。
ルネサスの低電圧モータ駆動ソリューションは、安全性、小型フォームファクタ、最適化されたコスト、および他の電子回路と共有される統合 DC リンク バスにより、民生用機器の主要な要件に対応しており、次の利点をもたらします。
- より高い安全マージン – モーター、ポンプ、ファンを主電源電圧レベルから隔離することで、設計者や保守スタッフにとってシステムの安全性が高まります。
- サイズとコストの削減 - 高電圧 IGBT, MOSFET、または統合パワーモジュール(IPM)は通常、ゲートをオンにするために絶縁された12Vdc〜15Vdcまたは外部ブートストラップ回路を必要とするため、コンポーネントの数が増加し、そのようなドライブボードの製造コストが増加します。 逆に、低電圧ソリューションは、内部ブートストラップを使用し、沿面距離とクリアランス要件を低く抑えることで、PCB のサイズとコストを大幅に削減します。
- モーター駆動効率の向上 – 低電圧、低電力アプリケーションでは、RDS が小さい MOSFETon およびゲート電荷は非常に低い損失を達成し、追加の放熱コンポーネントを必要とせず、システム全体のコスト削減にさらに貢献します。
生産と開発のコストを可能な限り低く抑えながら、モーター制御のパフォーマンスを強化し、最高の効率を達成するには、適切なマイクロコントローラーを選択することが重要な決定要素です。 ルネサス MCU はモータ制御アプリケーション向けに特別に設計されており、アナログおよびデジタル周辺機器を統合することでよりシンプルなハードウェア設計を実現し、最先端のソフトウェア開発キット (SDK) を介してより迅速なソフトウェア開発を実現します。 これらの MCU のユニークな機能と、それらが最適な低電圧モータ駆動システムの設計にどのようにつながるかを詳しく説明します。
低電圧モーター制御のトレンドと主要な課題
モーター制御アルゴリズムを実行するマイクロコントローラーは、いくつかのフィードバック測定、フィルター処理、および数学的計算に依存して、必要なトルクと速度を効率的に提供します。 したがって、センサーの出力を MCU に適切な電圧レベルに変換し、信頼性の高い保護を可能にするには、いくつかのアナログ電子回路が必要です。 RA6T2、RX13T、RX26T、および RX72T MCU の豊富な統合アナログおよびデジタル ペリフェラルと、ルネサス独自のコアおよび強力な Arm の組み合わせ® 皮質®-M コア、ルネサス独自の IIR フィルターおよび三角関数アクセラレータ (IIRFA および TFU) により、これらの MCU は最も一般的な設計課題に取り組むのに最適な選択肢となります。
電流測定
低電圧ドライブで電流を測定する最も一般的な方法は、シャントまたは電流検出抵抗の両端の電圧降下を検出することです。 非常に小さな抵抗を選択すると、電力損失は低くなりますが、センス電圧の大きさが大幅に低下し、ADC が値を読み取ることができなくなります。 この一般的な問題に対処するために、ルネサスは、サンプル アンド ホールドを備えた 12 ビットまたは 16 ビット ADC と、入力信号を正確に増幅し、デジタル値に変換する前に安定した DC オフセットを注入する組み込みプログラマブル ゲイン アンプ (PGA) を導入しました。 内部 PGA を使用すると、外部コンポーネントが不要になり、PCB のサイズとコストが削減され、同時に温度変化を補償する機能を備えた低ノイズと安定した基準電圧動作が実現します。
過電流保護
高い突入電流が発生した場合には、駆動システムとモーターをできるだけ早く保護することが不可欠であり、これは通常、ゲートドライブをシャットダウンするために外部アナログコンパレータによって実装されます。 ただし、6 ビット MCU の RA32T ファミリは、PGA 出力を最大レベルと比較し、50 ナノ秒未満の遅延で PWM 信号をオフにする統合高速アナログ コンパレータ (ACMPHS) を提供します。
測定ノイズ
インバータによって誘発される高周波スイッチング リップルと環境ホワイト ノイズにより、測定される電圧と電流の品質が損なわれます。 したがって、信号をフィルタリングする必要があります。 ルネサスの RA6Tx MCU は、大きくて不安定な外部アナログ ローパス フィルタの代わりに、ハードウェア実装されたバイクアッド IIR フィルタ アクセラレータ (IIRFA) を提供し、速度制御と電流ループ計算の処理サイクルを他の MCU と比較して約 40% 削減します。


図 1. ルネサスの RA6Tx リッチ統合アナログ ペリフェラルの 3 相 BLDC ドライブへのアプリケーション
(フェーズ A のみを含む)
BLDCを制御する効率的な方法
BLDC 駆動に必要なアナログとデジタルの混合ハードウェアに加えて、制御アルゴリズムは、メーカーとエンド ユーザーの生産コストと運用コストを削減するために最大の効率を実現する必要があります。 BLDC モーターにはいくつかの異なる制御方法が採用されており、それぞれに独自の原理と用途があります。 最も一般的に使用される方法には、台形制御、正弦波制御、フィールド指向制御 (FOC)、およびベクトル制御が含まれます。
台形制御
台形制御は、ホール センサーのフィードバックに基づいた XNUMX ステップの整流パターンでモーターの巻線に電圧を印加することによって動作する BLDC モーター制御の最も単純な形式です。 この方法は、ファンやポンプなどの高速アプリケーションで優れたパフォーマンスを提供しながら、低コストの実装を実現します。 この方法の主な欠点は、XNUMX 段階の整流によりスムーズなトルク出力を生成できないことであり、その結果、動作中に可聴ノイズと振動が増加します。
正弦波制御
回転子位置センサーデータまたは逆起電力推定アルゴリズムに基づく PWM 技術を通じて相電流の正弦波形状を制御することにより、台形法と比較して幅広い速度範囲で優れた性能を達成でき、その結果、より低速でのよりスムーズな動作が実現します。高出力モーター/コンプレッサーに適した速度。 ただし、この方法ではモーターの電磁性能の最適な使用が保証されず、最大効率を提供できません。
フィールド指向の制御
フィールド指向制御 (FOC) は、モーター磁束ベクトル空間内の磁化コンポーネントからトルク生成コンポーネントを分離する、より高度な技術です。 ロータの磁束をステータの磁束と一致させることにより、より高いレベルの制御性が達成され、動的応答と高トルク能力の向上につながり、停止から定格までの幅広い速度範囲にわたる要求の厳しいアプリケーションにとって理想的な方法となります。 複素平面でモーターをモデル化すると、dq 基準座標系として知られる回転座標系上の電流ベクトルの大きさと位相角を操作することで、トルクと磁束成分の両方を正確に制御できます。 これらのベクトルの大きさと位相を操作することにより、ベクトル制御はトルクと磁束成分の正確な調整を実現し、効率、動的応答、スムーズな出力トルクの点で優れた性能をもたらします。
ベクトル制御
ベクトル制御 (VC) は、モーター モデルが複素平面で表現される FOC をさらに改良したものです。 dq 基準座標系として知られる回転座標系上の電流ベクトルの大きさと位相角を操作することで、トルクと磁束成分の両方を正確に制御できます。 これらのベクトルの大きさと位相を操作することにより、ベクトル制御はトルクと磁束成分の正確な調整を実現し、効率、動的応答、スムーズな出力トルクの点で優れた性能をもたらします。
アンペアあたりの最大トルク
ブラシレス直流モーター (BLDC) と永久磁石同期モーター (PMSM) は両方とも、アンペアあたりの最大トルク (MTPA) の概念の恩恵を受け、電流レベルを調整して最大の電磁効率を達成することでモーターの動作を最適化できます。 ベクトル制御ベースの MTPA 戦略は、モーターのトルク-速度特性曲線上のピーク電力点またはその付近で動作することにより、損失を削減しながらエネルギー変換を改善できます。
MTPA アルゴリズムと dq フレーム変換では、制御サンプリング時間ごとに複雑な三角関数を計算する必要があります。 ルネサスが開発した業界をリードする三角関数ユニット (TFU) ハードウェア アクセラレータにより、フラッシュ メモリ上のルックアップ テーブルと比較して処理時間が 20% 短縮され、ROM サイズが小さくなります。
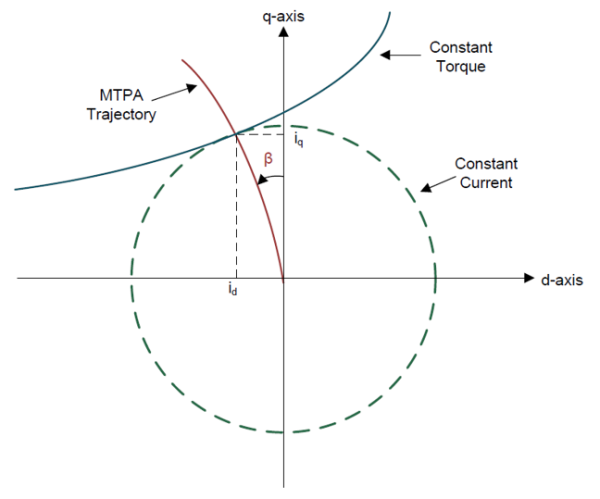

図 2. アンペアあたりの最大トルクの軌跡 [「Modern Power Electronics and AC Drives」、B. Bose、Prentice Hall、2001 年の提供]

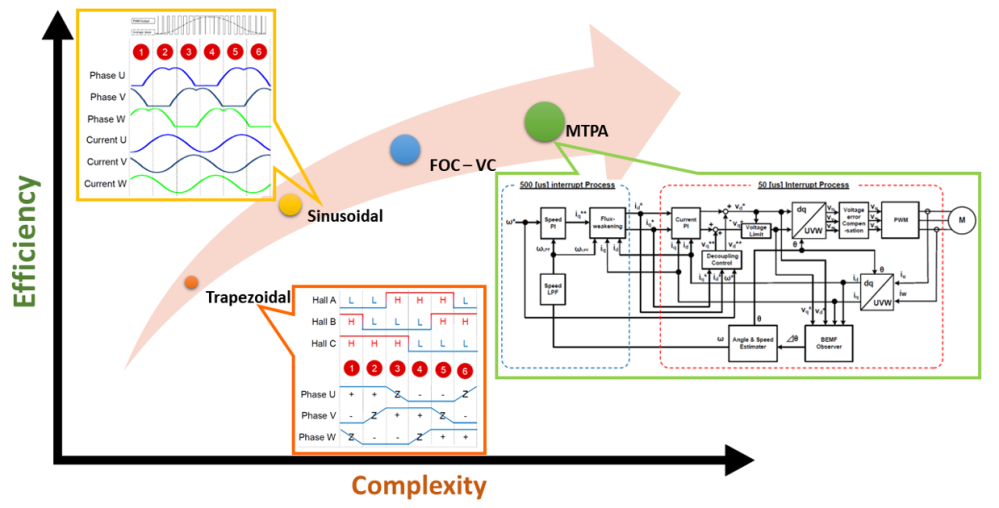
図 3. BLDC 制御方式の比較
ルネサスで低電圧 BLDC ドライブ設計を加速
モーターベースの組み込みシステム開発は、特に必要な性能と効率を達成するためにモータードライブの制御を最適化することに関連するため、非常に困難な場合があります。 ただし、適切なソフトウェアおよびハードウェア設計ツールを使用すると、開発時間を短縮できます。 ルネサスは、RL78、RX、および RA MCU ファミリに基づいた幅広いモーター制御デバイスと、モーター制御設計を加速する関連リファレンス デザインおよびスターター キットを提供しています。 ここでは、当社の RA MCU ポートフォリオの例の XNUMX つである、包括的なソリューション プラットフォームを提供する、RA および RX ベースのモータ制御評価システム用の Renesas Solution Starter Kit (RSSK) を紹介します。 さまざまなサンプル コードとアプリケーション ノートを使用してモーター制御の評価を容易にし、市場投入までの時間を短縮する低電圧 BLDC ドライブ ソリューションを提供します。 さらに、MCU内の変数の読み書きや変数の波形を直感的なGUIで表示できるAnalyzer機能を備えたデバッグツールを含む充実した開発環境であるMotor Workbenchを提供しています。

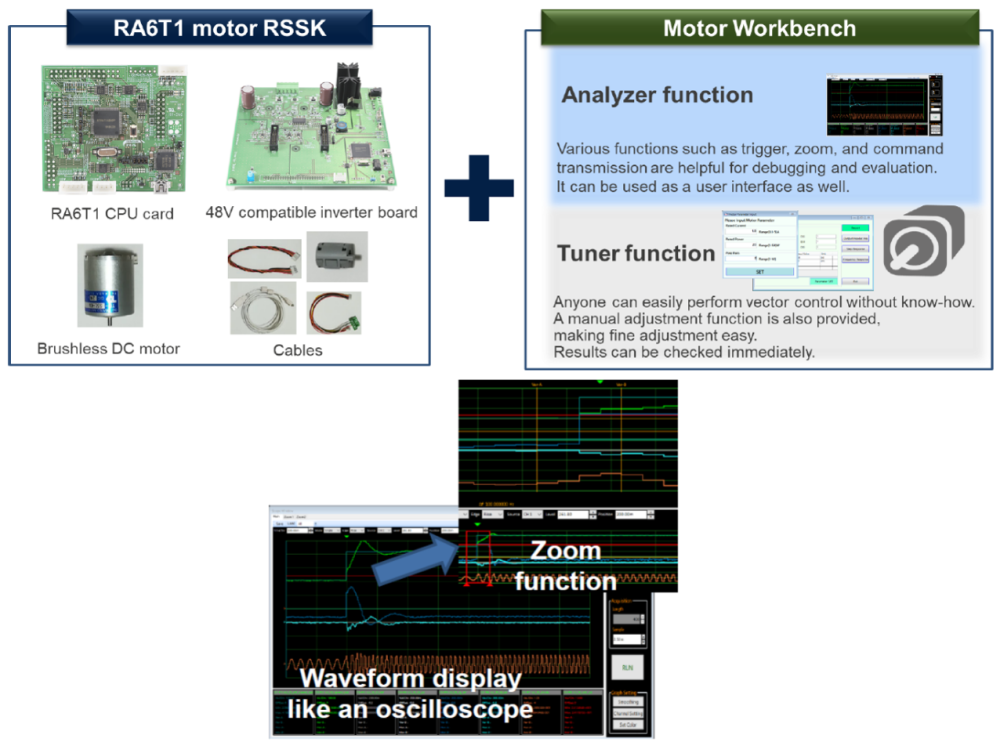
図 4. RA6T ファミリ MCU 用のルネサス モータ制御評価システム
民生用電化製品業界およびその他の関連する低電圧モーターベースのアプリケーションは、時代遅れのライン駆動のユニバーサル AC モーターの代わりに、高効率の BLDC モーターと関連する駆動システムを使用する方向に急速に移行しています。 消費電力、物理的サイズ、全体的な設計コストの削減は、この急速に進化する業界において依然として重要な課題の一部です。 したがって、競争力のある最終製品を展開するには、最適なマイクロコントローラーと電源コンポーネントを選択することが最も重要です。 この分野の市場リーダーであるルネサスは、組み込み開発者が最も効果的な制御実装を実現できるよう、高度に統合されたアナログ周辺機器と強力な処理能力を備えたモータ駆動アプリケーションに特化した幅広い MCU を提供しています。 ルネサスの最先端の BLDC 開発プラットフォームと、無料で利用できる統合 IDE ワークベンチおよびソフトウェア サンプルを組み合わせることで、設計者は妥協することなく最終製品の納品を加速できます。
情報源: https://www.slw-ele.com/low-voltage-motor-control-with-enhanced-operation.html