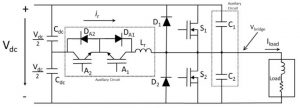

これは、従来のXNUMX相ブリッジ(この場合は炭化ケイ素ブリッジですが)に、整流する直前にメインブリッジトランジスタから電流を一時的に迂回させるXNUMXつの補助共振回路(相ごとにXNUMXつ)を追加することによって行われます。
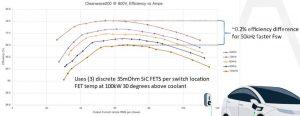

18個のMOSFETを説明するには:それぞれ モスフェット 三相ブリッジでは実際には並列トリプレットであり、XNUMX つの補助シリコン IGBTは実際には 200kW 設計の並列ペアであり、効率デモでは 100kW で実行されました。 ブリッジ MOSFET は、スイッチング損失ではなく導通損失のみを考慮してサイズを設定する必要があり、補助シリコン IGBT は、自身のスイッチング損失と短時間の全電流導通のみを処理すればよいため、ブリッジ スイッチよりもはるかに小さくなります。 ダイオード D1 と D2 上の図 ARCP 用に追加する必要があります。これらは炭化ケイ素であり、1サイクルあたり36μsだけ伝導すればよいため小型です。同社は、同様のハードスイッチインバータには 35x 10mΩ ダイが必要で、10kHz でしか動作できないと主張しています。100kHz 動作では 10kHz と比較して、XNUMX 倍大きな DC リンクが必要になります。 コンデンサ.


Pre-Switchによると、ARCPは1980年代にGeneral Electricによって発明されましたが、補助回路の時間を正確にプリエンプトするための信頼できる方法は見つかりませんでした。したがって、ある程度の不確実性を伴って動作する必要があります。 第二に、反応行動は「時間通り」になることは決してないため、システムは事前に行動する必要があります。信号は、いつ行動するかを示す明確な刺激なしに起動する必要があります。」
Pre-Switchの制御を可能にしたのは、人工知能への移行でした。 「ZVS [ゼロ電圧スイッチング]を実現するには、適応において統計的で予測的なシステムが必要です。これはAIの理想的なアプリケーションです」と同社は述べています。
「Pre-SwitchAIエンジンは、ノイズの多い環境から読み取られた不正確なデータを使用して、トランジスタの次のスイッチングサイクルについて学習、ストーリー、計画を立てます」とPre-SwitchのCEOであるBruceRenouardはElectronicsWeeklyに語りました。 「一般的な決定論的出力がありますが、AIは、完全なソフトスイッチングに必要な正確なタイミングを確実に知る前に、ゲートドライブ信号を送信する必要があります。 すべての結果は、入力または出力負荷の変化に応じて必要な次のタイミングを予測するためにアルゴリズムにフィードバックされます。これには、温度の変化、デバイスの劣化、入力電圧、PWM要求、出力負荷、およびエラー状態が含まれます。」

この技術は、従来のIGBTで作られたパワーブリッジにも適用できます。
「Pre-Switch は、SiC スイッチング損失の 99% または 99.999% を排除します」と Renouard 氏は述べています。 "同じ テクノロジー 異なるアルゴリズムを使用すると、IGBT スイッチング損失の 70 ~ 80% を排除できます。 IGBT が 99% ではない理由は、ターンオフ テール電流が長く、今日ではソフト スイッチングでは低減できないためです。 興味深いことに、この問題を解決するために、IGBT メーカーにはゆっくりとターンオンし、素早くターンオフすることを望んでいます。」
このアルゴリズムは、補助スイッチにも影響します。
「[補助] IGBTは、50kWから400kWまでのほとんどの電力範囲に対応できるサイズにすることができます。 共振スイッチに500つのIGBTを並列に使用するXNUMXkWの設計を行いました(フェーズごとに合計XNUMXつ)が、最新のAIを使用してフェーズごとにXNUMXつ戻すこともできます」と彼は述べています。
補助回路を追加する代わりに、メインブリッジを共振させてみませんか?
今日、DCからACへのインバーターを構築するために使用できるソフトスイッチングトポロジーを認識していません。 市場はすべて、モーター制御が必要なものすべてにハードスイッチされています。 産業用ソーラーインバーターのように、正弦波出力の品質を改善するために4レベルコンバーターを使用している市場がいくつかあります。 これらのマルチレベルインバーターは非常に複雑で、16〜10倍のスイッチと独立したゲートドライバーがあり、制御が困難ですが、機能します。 プレスイッチソリューションは、XNUMXレベルインバーターよりも高い効率を生み出し、あらゆるアプリケーションに使用できます。 XNUMXつのIGBTと関連するダイオードを追加することにより、プレスイッチテクノロジーは、動作するスイッチの総数を半分以上削減し、エンジニアがXNUMX倍以上の周波数で切り替えることを可能にします。
Pre-Switchは、そのトポロジーが「ロスレスdV / dtフィルター」を提供すると主張しています–それは何ですか?
すべての電気モーターには、電気モーターの絶縁が損傷しないようにするためにインバーターが以下に言う必要がある指定された最大dV / dtがあります。 スペックは通常5V / nsmaxのようなものです。 これは、高いdV / dtとそれに対応する高いdi / dtがモーターの信頼性に悪影響を及ぼし、電気モーターが故障する上位XNUMXつの理由の原因であるためです。高いdV / dtはモーターの絶縁破壊を引き起こし、高いdi / dtは電気によるベアリングの故障を引き起こします。 -化学エッチング。
これらの問題を解決するために、モーターとインバーターのメーカーは多くの異なる解決策を試みてきました。 XNUMXつは、より厚い絶縁体を使用することですが、これはモーターの巻線密度に悪影響を及ぼし、モーターの効率を低下させ、電力密度を損ないます。 もうXNUMXつは、コストがかかるセラミックベアリングを使用することです。
可変周波数ドライブが電気モーターから離れた場所に配置されている産業市場では、電圧が跳ね返って増幅し、さらに多くの問題を引き起こす可能性があるため、dV / dtはさらに大きな問題になります。
産業用アプリケーションのこの問題を解決するために、企業はアドオンのdV / dtフィルターを提供しています。 これらは、1,600kW〜2,000kWの電気モーターで約$ 100〜200の費用がかかり、通常、全出力範囲でさらに1〜2%の効率が必要です。
e-モビリティの分野では、解決策はモーターをインバーターに非常に近づけ、dV / dtを絶縁しきい値未満に保つことです。
プレスイッチには、動作中のスイッチの両端にコンデンサが追加されています。これは、インバータの効率が急落するため、ハードスイッチインバータでは決して実行できないことです。これにより、電圧と電流のエッジの上昇が遅くなり、トランジスタのオーバーシュートが減少または排除されます。 これはロスレスプロセスです。 本質的に、エッジ速度を遅くしますが、トランジスタのスイッチング速度を上げ、スイッチング損失はほとんどありません。 これはプレスイッチングのアーティファクトです。他のDC-DCおよびLLCソフトスイッチングアーキテクチャは、dV / dtまたはdi / dtの問題を解決しません。
Pre-Switch CEO の Bruce Renouard 氏が、同社がハードウェアとして販売する ARCP に必要な追加の電源コンポーネントについて説明します モジュール 吹き替えRPG:
- 相ごとにXNUMXつのIGBTスイッチとXNUMXつのSiCダイオード。
「これらはパルス定格であり、スイッチングサイクルあたり最大1μs以下で動作し、主要な動作電界効果トランジスタの半分の電圧で動作するため、低コストです」とRenouard氏は述べています。 - 共振コンデンサ
「これらは動作中のFET全体に配置され、di / dtとdV / dtを遅くするための設計目標によって異なります。 また、1μsのスイング期間中、各スイッチングサイクルで動作中のフェットのスイング電圧をゼロボルトに保持するためにも使用されます。」 - 共鳴 誘導子 (フェーズごとにXNUMXつ)
「これらは、負荷電流と、コンデンサの電圧をスイングするために必要なもう少しの電流を提供して、動作中のFETの両端に電圧がないようにします。 これは1μs以下でのみ動作します。」 - 両方のゲートドライバー IGBT 上記のリストと動作する FET のドライバー。