

Introduction
Provocatio SAE AutoDrive est 4 annus certaminis collegialis designatus, cum 8 iugis a US et Canada participatione. Summus gradus technicus propositum Annum 3 huius certaminis est navigare curriculum urbanum in automated incessus modo, quem describit SAE Level 4 .
MathWorks teams ad simulationem provocat
Simulatio utilissimum instrumentum ad progressionem vehiculi sui iuris est. Exemplar-substructio probatio adiuvare potest in algorithmo evolutionis, unitatis et systematis gradu probationis, et extremae casus missionis probatio. Verum mundi sensorem notitia notari potest et reducere in systema fusionis cantorum algorithmorum. Ambitus simulatio creari potest ad ambitus reales orbis terrarum applicandos et ad varias algorithmos et sensores positiones probandas adhiberi potest. Optima algorithms et sensoria positiones quae turmas adimplent requisita eligi possunt secundum effectus effectus perficiendi.
Singulis annis MathWorks iunctos provocat ad simulationem per simulationem provocare. Hoc blog breviter operiet locum primum 1 et 2 victores provocationis 2020 (Universitatis Torontoensis et Kettering University), consilium systematis eorum, et quomodo instrumenta MathWorks adhibita sunt ut altiore certationis proposita adiuvaret. Partes iudicatae sunt secundum modum quo instrumenta exercendi utebantur;
- Aperto-loop sensus probatio - synthesising notitia pro aperta-loop probatio perpendendis rectitudinem algorithms
- Clausa-loop controls probatio - synthesising clausa ansa missionibus, perpendendis algorithmus controls (s) perficientur
- Codex generationis imperium algorithmorum - codicem generans pro algorithms, codicem generatum in vehiculum integrans
- Innovatio per instrumenta MathWorks - ars /Technology distincte differt supra III genera
University of Toronto
Studiosus turmas ab Universitate Toronto, aUToronto, 1 locum in provocatione vicit.
Aperto-loop sensus temptationis
Hic turma primus gradus erat ut notitias syntheticas pro ansa aperta perceptio experiretur. Voluerunt algorithmum sensorem suum probare. Ad syntheticam datam syntheticam probationem, adhibebant (DSD). Hoc app efficit ut syntheticas missiones designes ad experiendas incessus sui iuris. Turma radar et 3 cameras in algorithms sensoris fusione adhibita sunt, quae ut figura 1 ostenditur configurantur.
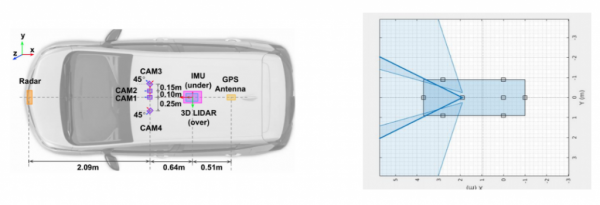

Figure 1: Team Sensor Locations (© aUToronto)
Sensores cameram imitati sunt - cum suis positionibus, orientationibus et configurationibus - in DSD app ut datas sensores synthesizare ut algorithms in fusione sensoriis pascerent. DSD cameram output simulat post imaginis processus et algorithmos computatrales processus, et strepitus et manor ad notitias addit.
Lector missionis scandalum legebat usus notitias missionis utens DSD creatas. Actor ponit sicut initus ad generantium multiplex detectio. Detectiones pro his variis sensoriis tunc ROS (Robot Operating System) nuntios vestit et ut mos ROS nuntios ad argumenta specifica ROS (Figura 2) mittebant, ut variae magnitudinis ROS (Figura XNUMX).
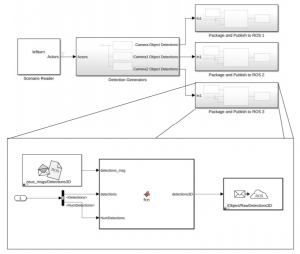

Figura 2: Simulink exemplar pro probatio aperto-loop (© aUToronto)
Manipulus coacervatum comparatum ab obiecto venato ad fundandas veritates valorum vehiculorum. RMSE (Raot Mean Square Error) metrica adhibita est pro aestimatione perficiendi.
Clausa controls temptationis-loop
Praecipuus focus turmae erat in probans modificatas suas consilium novas facultates quasi zonas aedificandas re- excitandas et circa impedimenta nudando. Propositum est resignatum ad structuram cancellorum utendam ubi orae ex tabula amputatae sunt ut semitas circa res necessarias inveniret (Figura 3). DSD iterum ad missiones creare solebat. Claustra et luminaria mercaturae etiam missionibus additae sunt.
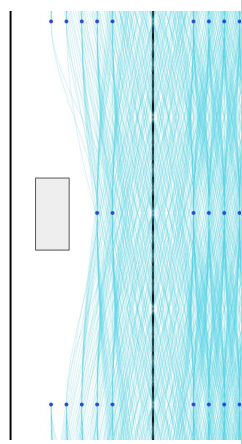

Figure 3: Lattice compages ad viam inveniendam (© aUToronto)
Manipulus tabulae negotiationis lucem publisher utens Stateflow expressit (Figura IV). Vehiculum cum ego e range (>4m) luminis negotiationis, incognitus publicus divulgatur. Cum ego intra ictum accipit, nuntius in luce rubra divulgatur. Nuntius switched ad lucem viridem postquam ego occlusum est 50 secs.
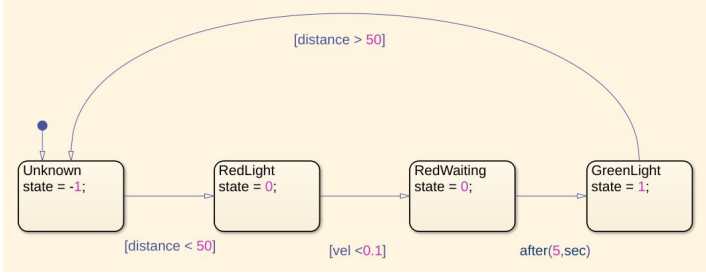

Figure 4: Stateflow ad exemplar moderatoris (© aUToronto)
Moderator, consilium, et vehiculum exemplar ROS nodi deductae sunt. Si impedimentum erat intra 50m vehiculorum ego, eius positio missa est sicut nuntius ROS ad exemplar Simulink (Figura 5).
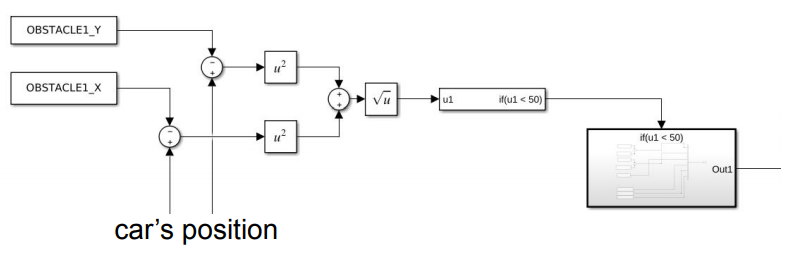

Figure V: Logica positio nuntius mittere (© aUToronto)
Code generation of controls algorithms
Turma generata codicem pro statur signo algorithm tractantem (Figura 6). Simulink Coder usus est ut Stateflow in C++ codicem converteret. A standalone Module generatus est usura in codice packaging munus. Modulus genitus tunc in turma codebase coaluit.
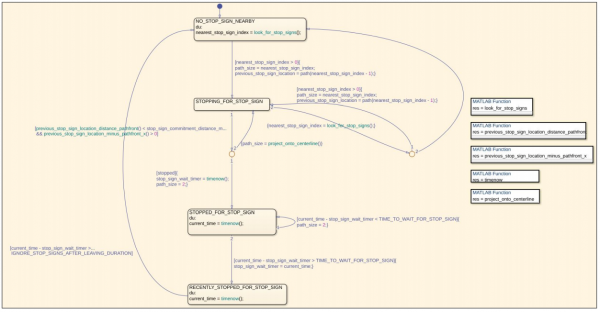

Figure 6: Desiste lux moderaminis logicae Stateflow (© aUToronto)
Innovatio per instrumenta MathWorks - Lidar camera calibratiis
Ut accurate res in scena cum inputibus ex lidar et a camera sensore interpretetur, necesse est ut simul ambages sensorem fusecant. Hinc manipulus transfigurationem inter Lidar et theam cameram faciebat ut Lidar puncta in imaginem vel vice versa pro fusione sensoris exstent. Pro manibus utendi mensuras et cameras rotandi usque ad proiectionem spectabant bona, bigas calibrationis instrumento Lidar Camerae noviter elaboratae ex instrumento processus Lidar instrumenti Lidar adhibebat. Hoc instrumentum aestimat mutationem rigidam matricis quae correspondentias statuit inter puncta in plano 3-D lidar et elementa in plano imaginis.
Maiorem tabulam calibrationis aedificaverunt quia currente una minus erat pro instrumento. Instrumentum calibrationis Camerae adhibitum est ut matricem intrinsecam pro camera sua reciperet. Anguli tessellati in unaquaque imagine reperti sunt, et data Lidar. Rigida mutatio matricis inter Lidar et cameram inventa est. Hic processus output transmutatio, quae punctum nubis datae super imagines vel vice versa proicere potest. Hi gradus in Figura VII monstrantur.


Figura 7: (a) Camera matrix intrinseca (b) angulis tessellatis (c) Lidar ad cameram transmutatio matricis (©aUToronto)
Universitas Keteryng
quod discipulus quadrigis ex Universitate Kettering, 2 loco in provocatione vici.
Aperto-loop sensus temptationis
Manipulus fictus Engine usus est ad varias missiones creandas. Camera addita est ad ego-vehiculum in Unreal simulatione 3D camerae utens. Exemplar Simulink adhibitum est ad detectionem laneorum faciendam utens imagines reales (Figura 8). Quadrata caerulea munera detectionis lane indicant et flava in singulis gradibus outputs indicant. Figurae hae output in Figura IX ostenduntur.
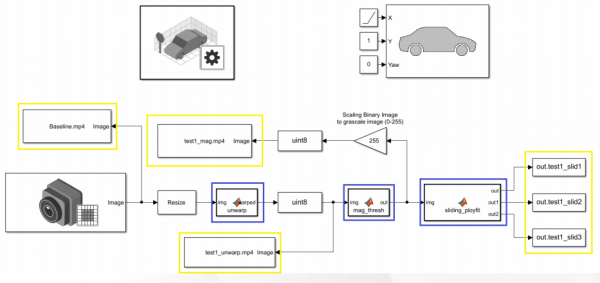

Figure 8: Simulink exemplar pro ansa aperta probatio (©Ketering University)


Figure 9: Lane detectio outputs (©Ketering University)
Clausa controls temptationis-loop
Consilium systematis turmae ex 2 machinis statui - longitudinalibus et lateralibus constabat. Haec machinae status, in fig, adhibitae sunt ad exemplar electionis moderatoris logicae secundum sensorem et deliberationem datam. Connexae sunt et adhibitae ut subsystematum moderatorem efficere et initialem efficere.
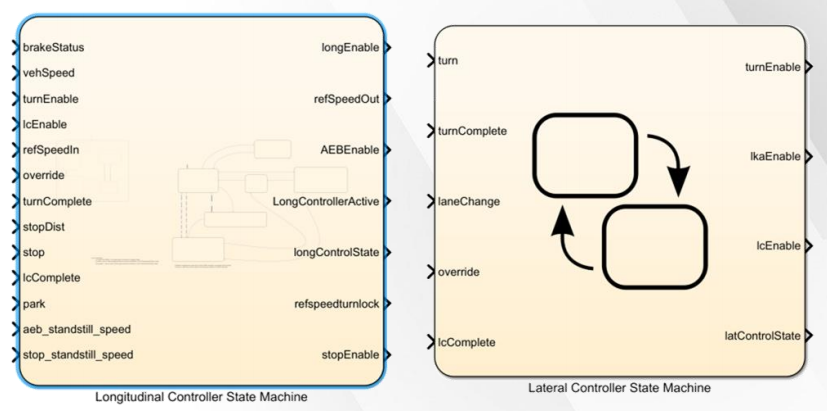

Figure 10: machinis rei publicae (©Ketering University)
Simulationes moderatoris compositae, cum exemplar Simulink in Figura 11, factae sunt ad comprobandum operationem omnium moderatoris iunctorum. Initibus his moderatoris adhibitis iunctionibus et gauges praebebantur.
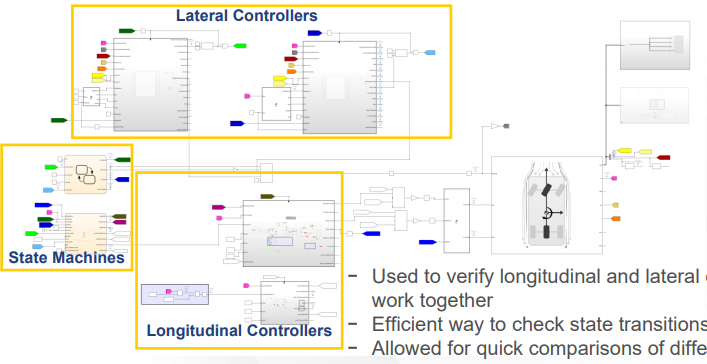

Figura 11: Simulink exemplar pro ansa clausa probatio (©Ketering University)
Status longitudinalis machinae moderatoris subsystematum includunt celeritatem longitudinalem moderatorem et subitis Braking Automatic (AEB). Civitates a dynamicis vehiculo longitudinalibus determinatae sunt sicut accelerate, lecythus, retardatus, consistens et ortus.
Machinationis status lateralis moderatoris subsystematum includunt Lane Adiuva (LKA), Mutationem Lane, et moderatores Turn. Civitates in dynamica vehiculo laterali constitutae sunt (Figura XII). Celeritas longitudinalis, mutatio lane, et moderatoris LKA infra agentur.
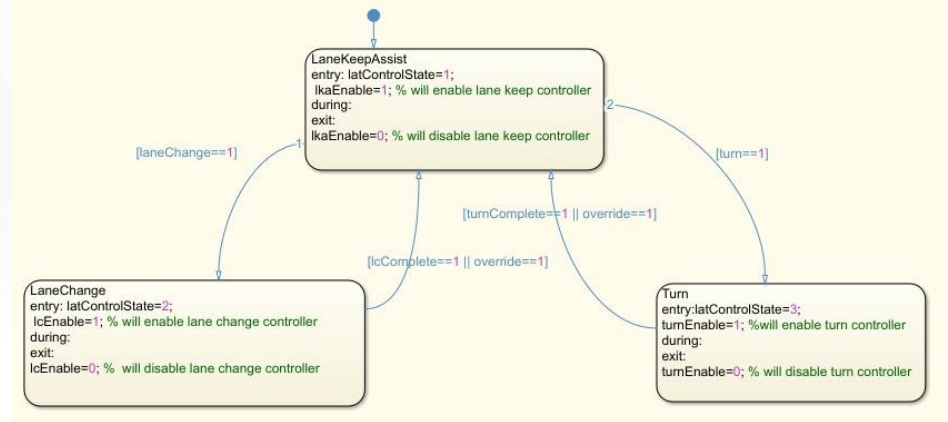

Figure 12: Lateralis moderatoris status (©Ketering University)
Longitudinalis moderatoris
Figura 13 exemplar Simulink ostendit adhibitum ad moderatoris longitudinalem exemplar. PID ex velocitate constat. Relationes et output torques rates limitatae sunt ut intra accelerationem certationis et inprobus fines manere. Systema inputationes initiales factae sunt et iunctae elaboratae et scopus ad notitias speculandas adhibita. Figura 14 scopo et actu longitudinali velocitatis outputs ostendit.
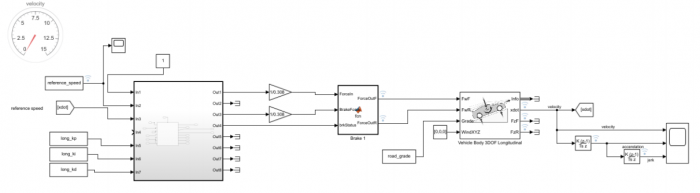

Figura 13: exemplar moderatoris longitudinalis Simulink (©Ketering University)
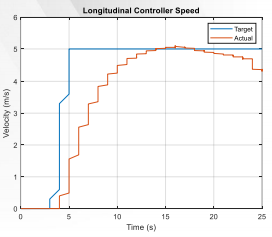

Figure 14: Comparationes velocitatis longitudinalis (©Ketering University)
Mutatio lane moderatoris
Manipulus Lane Mutare moderatoris usus adaptive MPC (Model Praedictive Control). Respectio semita generata est functionibus parametricis utens, cum venella mutatione initibus qualia sunt celeritas vehiculum et latitudo lane. Stationes ad moderatorem positionem lateralem et Yaw referebant. A 3DOF (Degree of Freedom) exemplar adhibitum est ad simulandum corpus vehiculum. Figura 15 Simulink exemplum simulationis adhibitum ostendit. Figura 16 simulationis outputs cum reference et simulatae lane mutationes semitas ostendit, una cum viis post in- tentationem vehiculum consecutis.
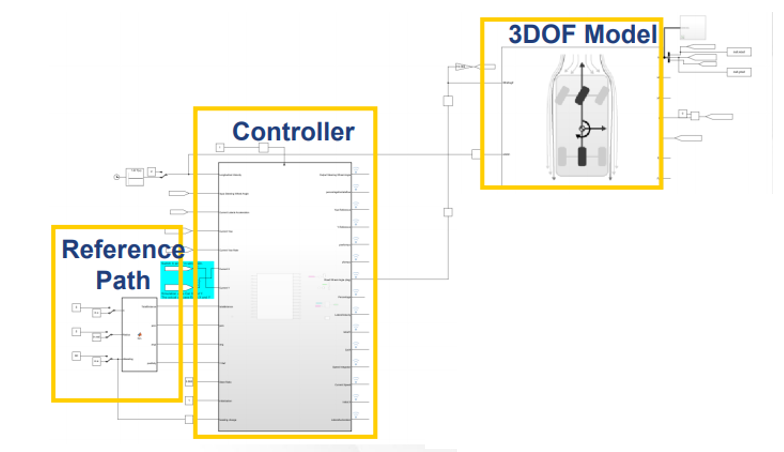

Figura 15: Lane mutatio moderatoris Simulink exemplar (©Ketering University)
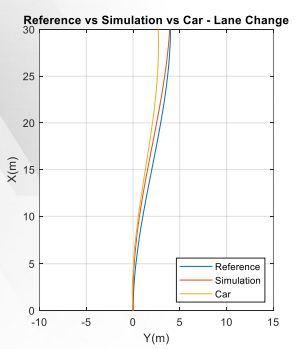

Figura 16: Lane mutabilis viis comparationibus (©Ketering University)
Vehiculum exemplar
Turma evolvit et roboravit 3DOF unum et dual vestigium vehiculi exemplar. Convalidatio initialis fiebat utens exemplar birotae linearis. Ultima sanatio facta est cum notitia test physica. Figura accelerationis lateralis ostendit comparationem coactionis cum validationibus initialibus et finalibus, sine notitia et cum test.
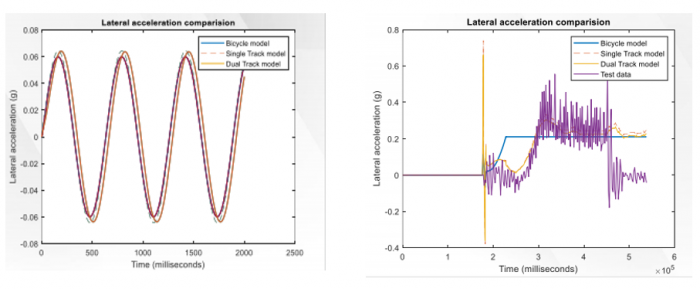

Figure 17: (a) Comparationes accelerationis lateralis (b) Comparationes cum notitia test (©Ketering University)
Innovatio per instrumenta MathWorks - Unreal civitatem
Manipulus fictus usus est ad ansam clausam probationem omnium moderatoris sui. Urbem Unream creaverunt cum moderandis motibus pedestris ac luminibus negotiationis. Vestibulum actores creati sunt et informationes eorum sicut actor nomen, actor genus, actor singula, singula animationis, et tags reposita erant ad accessum velox. Tabula lucis negotiationis etiam cum lucernis locum intitulatum Figura 18 creatum est.
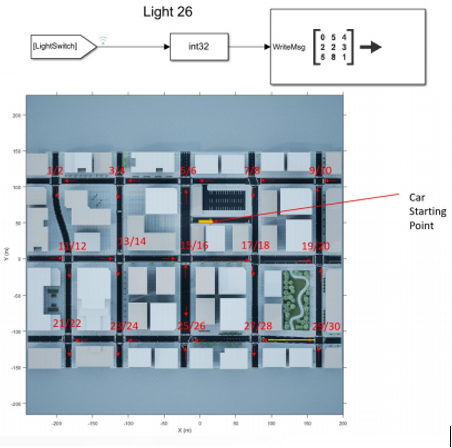

Figure 18: tabula levis negotiationis ficta (©Ketering University)
Figura 19 monstrat structuram communicationis simulink-Unrealis systematis. Deliberationem faciens ad scaenam Unrealem, consistens positionis vehiculorum, motus pedestris, status negotiationis luminaria etc. factum est utens Stateflow et ut initus ad moderatoris missum (Figura 20).
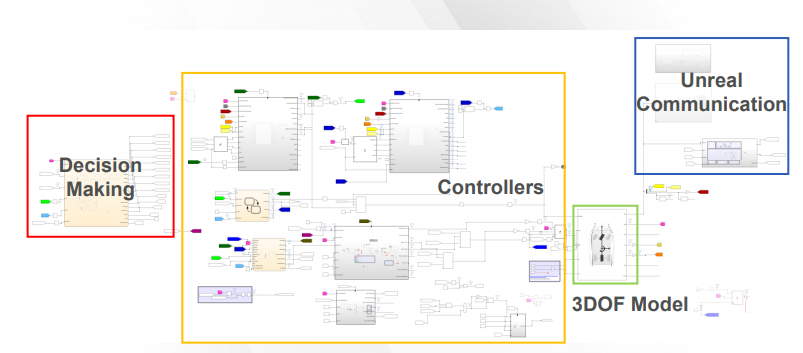

Figure 19: Simulink Unreal system structura communicationis (©Ketering University)
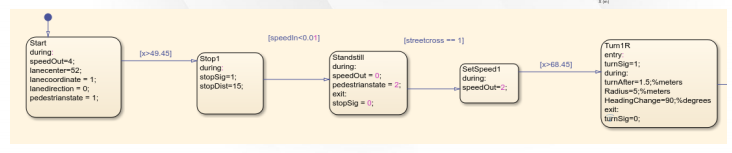

Figure 20: Stateflow pro scaena Unreal decision faciens (©Ketering University)
In fine, iunctiones studentium ex Universitate Toronto et Kettering Universitate MATLAB et Simulink pressionibus excogitare, aedificare, test, aestimare fusionem, vestigia, navigationem algorithmorum accedere ad gradum propius ad aedificationem SAE gradu 4 autonomiae in vehiculo in simulatio. Missiones perplexas cum luminibus negotiationis auctoribus et pluribus actoribus in diversis ambitibus simulationis, ambitibus Simulink impleverunt, et electos suos algorithmos in his missionibus explicaverunt et probaverunt. Ansa aperta et ansa clausa algorithmorum perceptio exemplata sunt et probata utens Simulink, et signum ad has systemata generatum est. Partes etiam designaverunt et probaverunt varias algorithmos moderatoris simulink et Stateflow utentes. Instrumenta MathWorks ambabus iugis pilae late adhibita sunt porttitor et late.