บทความนี้จะแนะนำวิธีการสามวิธีที่สามารถเพิ่มความเร็วให้กับการออกแบบระบบมอเตอร์ BLDC ในขณะเดียวกันก็นำเสนอโซลูชั่นประหยัดพลังงานที่ชาญฉลาดและกะทัดรัดยิ่งขึ้น
โลกกำลังทำงานอย่างหนักเพื่อลดการใช้พลังงาน และโมเมนตัมก็แข็งแกร่งขึ้นเรื่อยๆ หลายประเทศ/ภูมิภาคกำหนดให้เครื่องใช้ในครัวเรือน (ดังแสดงในรูปที่ 1) เป็นไปตามมาตรฐานด้านประสิทธิภาพที่กำหนดโดยองค์กรที่เกี่ยวข้อง เช่น China National Institute of Standardization (CNIS), US Energy Star และ German Blue Angels
เพื่อให้เป็นไปตามมาตรฐานเหล่านี้ นักออกแบบระบบจำนวนมากขึ้นเรื่อยๆ ได้ละทิ้งมอเตอร์เหนี่ยวนำไฟฟ้ากระแสสลับเฟสเดียวที่เรียบง่ายและใช้งานง่ายในการออกแบบของพวกเขา และหันมาใช้พลังงานต่ำที่ประหยัดพลังงานมากขึ้นแทนแรงดันไฟฟ้า มอเตอร์กระแสตรงไร้แปรงถ่าน (BLDC) เพื่อให้มีอายุการใช้งานยาวนานขึ้นและลดเสียงรบกวนในการทำงาน ผู้ออกแบบเครื่องใช้ไฟฟ้าในครัวเรือนขนาดเล็ก เช่น หุ่นยนต์กวาดได้หันมาใช้มอเตอร์ BLDC ที่ล้ำหน้ากว่าในหลายระบบของตน ขณะเดียวกันก็มีความก้าวหน้าของแม่เหล็กถาวร เทคโนโลยี กำลังลดความซับซ้อนในการผลิตมอเตอร์ BLDC อย่างต่อเนื่อง โดยลดขนาดระบบลงในขณะที่ให้แรงบิด (โหลด) เท่าเดิม ซึ่งสามารถปรับปรุงประสิทธิภาพและลดเสียงรบกวนของระบบได้ด้วย

รูปที่ 1: เครื่องใช้ในครัวเรือนทั่วไป

การออกแบบระบบโดยใช้มอเตอร์ BLDC เป็นเรื่องที่ท้าทายเพราะว่าโดยปกติฮาร์ดแวร์ที่ซับซ้อนและการออกแบบซอฟต์แวร์ที่ปรับให้เหมาะสมนั้นจำเป็นต่อการควบคุมแบบเรียลไทม์ที่เชื่อถือได้ ทางเลือกหนึ่งในการเร่งความเร็วรอบการออกแบบคือการใช้โมดูลมอเตอร์ BLDC ที่จัดหาโดยซัพพลายเออร์มืออาชีพ แต่โมดูลเหล่านี้ไม่ได้ปรับให้เหมาะกับความต้องการของระบบเฉพาะ
ดังนั้น เพื่อสร้างระบบประสิทธิภาพสูงที่ได้รับการปรับปรุงให้ตรงตามข้อกำหนดการใช้งานเฉพาะ ยังคงจำเป็นต้องมีความเข้าใจเชิงลึกเกี่ยวกับการออกแบบและการควบคุมมอเตอร์ แม้ว่าจะใช้โมดูลก็ตาม ในบทความนี้ ผมจะแนะนำสามวิธีที่สามารถเร่งการออกแบบระบบมอเตอร์ BLDC ขณะเดียวกันก็มอบโซลูชันประหยัดพลังงานที่ชาญฉลาดและกะทัดรัดยิ่งขึ้น
วิธีที่ 1: ไม่จำเป็นต้องตั้งโปรแกรมการควบคุมแบบไร้เซ็นเซอร์
ไดรเวอร์มอเตอร์ที่ไม่มีการตั้งโปรแกรมมีอัลกอริธึมการเปลี่ยนการควบคุมในตัว ดังนั้นจึงไม่จำเป็นต้องพัฒนา บำรุงรักษา และการรับรองซอฟต์แวร์ควบคุมมอเตอร์ ตัวขับมอเตอร์เหล่านี้มักจะได้รับข้อเสนอแนะจากมอเตอร์ (เช่นสัญญาณฮอลล์หรือแรงดันเฟสมอเตอร์และสัญญาณกระแส) คำนวณสมการการควบคุมที่ซับซ้อนในแบบเรียลไทม์เพื่อกำหนดสถานะการขับมอเตอร์ถัดไป และเป็นตัวขับเกทหรือเมทัลออกไซด์ สารกึ่งตัวนำ ทรานซิสเตอร์สนามผล ( MOSFET) และส่วนประกอบส่วนหน้าแบบอะนาล็อกอื่นๆ ให้สัญญาณมอดูเลตความกว้างพัลส์ (ดังแสดงในรูปที่ 2)
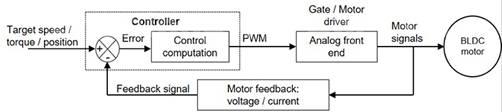
รูปที่ 2: ระบบมอเตอร์ BLDC แบบไม่มีเซนเซอร์ทั่วไป

เมื่อใช้ตัวขับมอเตอร์ที่มีฟังก์ชันการควบคุมแบบไร้เซ็นเซอร์ในตัว (เช่น ตัวขับมอเตอร์ MCF8316A ที่มีฟังก์ชัน Field Oriented Control (FOC)) สำหรับการควบคุมแบบเรียลไทม์ ไม่จำเป็นต้องใช้ Hall-effect เซ็นเซอร์ ในมอเตอร์ซึ่งสามารถปรับปรุงความน่าเชื่อถือของระบบและลดต้นทุนรวมของระบบได้ ตัวขับมอเตอร์ที่ไม่มีการตั้งโปรแกรมยังสามารถจัดการฟังก์ชันที่สำคัญได้ (เช่น การตรวจจับความผิดปกติของมอเตอร์) และใช้กลไกการป้องกันเพื่อทำให้การออกแบบระบบโดยรวมมีความน่าเชื่อถือมากขึ้น
อุปกรณ์เหล่านี้สามารถมาพร้อมกับอัลกอริธึมการควบคุมที่ผ่านการรับรองล่วงหน้าซึ่งดำเนินการโดยหน่วยงานออกใบรับรอง เช่น Underwriters Laboratories ซึ่งช่วยให้ผู้ผลิตอุปกรณ์ดั้งเดิมสามารถร่นระยะเวลาในการออกแบบเครื่องใช้ในบ้านของตนได้
วิธีที่ 2: ใช้ฟังก์ชันควบคุมมอเตอร์อัจฉริยะเพื่อปรับแต่งมอเตอร์อย่างง่ายดาย
ข้อกำหนดพารามิเตอร์ประสิทธิภาพของระบบ (เช่น ความเร็ว ประสิทธิภาพ และสัญญาณรบกวน) แก้ไขได้ยากโดยการปรับมอเตอร์ BLDC ปัญหานี้สามารถแก้ไขได้โดยการพัฒนาอัลกอริธึมควบคุมรูปสี่เหลี่ยมคางหมูแบบไร้เซ็นเซอร์ ซึ่งการสลับจะถูกกำหนดโดยแรงดันไฟฟ้า back-EMF ของมอเตอร์ เพื่อให้การดำเนินการปรับไม่ถูกจำกัดโดยพารามิเตอร์ของมอเตอร์
ตัวขับมอเตอร์ในตัว (เช่น MCT8316A) ที่รวมฟังก์ชันการควบคุมสี่เหลี่ยมคางหมูแบบไร้เซ็นเซอร์สามารถให้ประสิทธิภาพของระบบที่ได้รับการปรับปรุงให้เหมาะสมโดยไม่จำเป็นต้องใช้อินเทอร์เฟซที่ซับซ้อนเพื่อเชื่อมต่อกับไมโครคอนโทรลเลอร์ นอกจากนี้ โปรดทราบว่าในระหว่างกระบวนการปรับแต่งมอเตอร์ ตัวขับมอเตอร์ในตัวจะให้สัญญาณตอบรับ เช่น แรงดันเฟสของมอเตอร์ กระแส และความเร็วของมอเตอร์ที่แสดงบนออสซิลโลสโคป
ในอัลกอริธึม FOC แบบไร้เซนเซอร์ เนื่องจากการผสานรวมเทคโนโลยีการควบคุมขั้นสูง การปรับจูนมอเตอร์จึงสามารถเร่งได้อย่างมาก เช่น โดยการวัดพารามิเตอร์ของมอเตอร์ด้วยตัวเองหรือทำการปรับแต่งลูปควบคุมโดยอัตโนมัติ
ส่วนต่อประสานกราฟิกกับผู้ใช้ (GUI) การปรับแต่งแบบมีคำแนะนำให้ตัวเลือกการเริ่มต้นมอเตอร์เริ่มต้น (ดังแสดงในรูปที่ 3) ซึ่งจะช่วยให้กระบวนการปรับแต่งเสร็จสมบูรณ์ได้อย่างราบรื่นและหมุนมอเตอร์โดยเร็วที่สุด ตัวขับมอเตอร์ที่ไม่จำเป็นต้องตั้งโปรแกรม (เช่น MCF8316A สำหรับ FOC และ MCT8316A สำหรับการควบคุมสี่เหลี่ยมคางหมู) มีตัวเลือกที่กำหนดค่าได้หลายตัวสำหรับการสตาร์ทมอเตอร์และวงรอบปิดและการหยุดมอเตอร์ ด้วยตัวเลือกเหล่านี้ ประสิทธิภาพของมอเตอร์สามารถปรับให้เหมาะสมได้ภายในไม่กี่นาที ซึ่งจะทำให้วงจรการออกแบบสั้นลงอย่างมาก
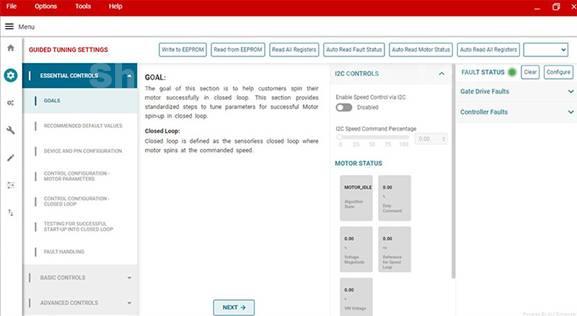
รูปที่ 3: GUI การปรับจูนที่แนะนำ

วิธีที่ 3: ลดขนาด
สำหรับนักออกแบบระบบหลายคน งานสร้างฮาร์ดแวร์ของระบบ BLDC นั้นยากมาก ระบบทั่วไปต้องใช้ไดรเวอร์เกท มอสเฟต, เซนส์แอมพลิฟายเออร์เซ็นเซอร์ปัจจุบัน, ตัวเปรียบเทียบเซ็นเซอร์วัดแรงดันไฟ และตัวแปลงอนาล็อกเป็นดิจิตอล ระบบส่วนใหญ่ต้องการสถาปัตยกรรมพลังงานเฉพาะ (รวมถึงอุปกรณ์เช่นตัวควบคุมการเลื่อนออกต่ำหรือตัวควบคุมบั๊ก DC/DC) เพื่อจ่ายไฟให้กับส่วนประกอบทั้งหมดบนบอร์ด ไดรฟ์ BLDC แบบรวมจะรวมส่วนประกอบทั้งหมดเหล่านี้เข้าด้วยกันเพื่อให้เป็นโซลูชันที่กะทัดรัดแต่ใช้งานง่าย ดังแสดงในรูปที่ 4
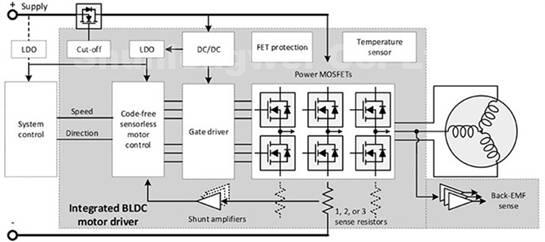
รูปที่ 4: โซลูชันมอเตอร์ BLDC แบบครบวงจร

ตัวขับมอเตอร์ที่มีฟังก์ชันการควบคุมในตัวประกอบด้วยฟังก์ชันการป้องกัน เช่น การป้องกันกระแสเกินและแรงดันไฟฟ้าเกินสำหรับ MOSFET และการตรวจสอบอุณหภูมิ ช่วยให้นักออกแบบสามารถนำเสนอโซลูชันที่มีประสิทธิภาพได้อย่างง่ายดาย
สำหรับการใช้งานมอเตอร์ที่มีการใช้พลังงานน้อยกว่า 70W เช่น หุ่นยนต์กวาด พัดลมเพดานในครัวเรือน หรือปั๊มที่ใช้ในเครื่องซักผ้า สามารถเลือกอุปกรณ์ที่มี MOSFET ในตัวเพื่อลดพื้นที่การจัดวางเพิ่มเติม อุปกรณ์ MCF8316A และ MCT8316A รองรับกระแสสูงสุดสูงสุด 8A ในแอปพลิเคชัน 24V สำหรับการใช้งานที่มีกำลังสูง สามารถวาง MOSFET กำลังบนบอร์ดเพื่อรวมฟังก์ชันไดรเวอร์เกตและการควบคุมมอเตอร์ไว้ในชิปตัวเดียว
แนวคิดที่กล่าวถึงในบทความนี้ช่วยเร่งความเร็วรอบการออกแบบระบบในขณะที่ให้ระบบมอเตอร์ BLDC ที่เล็กกว่าและชาญฉลาดกว่า ด้วยความช่วยเหลือของ MCF8316A และ MCT8316A ซึ่งไม่ต้องการการเขียนโปรแกรมและไดรเวอร์มอเตอร์ BLDC แบบไม่มีเซ็นเซอร์ ระบบควบคุมแบบเรียลไทม์ประสิทธิภาพสูงที่ได้รับการปรับแต่งมาอย่างเหมาะสมสามารถออกแบบได้อย่างรวดเร็ว อุปกรณ์เหล่านี้สามารถจ่ายไฟได้มากถึง 70W สำหรับการใช้งาน 24V ด้วยเทคโนโลยีการควบคุมอัจฉริยะแบบบูรณาการ มอเตอร์ไดรฟ์สองตัวนี้ปรับแต่งได้ง่าย และสามารถใช้เพื่อให้ได้โซลูชันระบบที่มีประสิทธิภาพสูงและเชื่อถือได้ เหมาะอย่างยิ่งสำหรับการสร้างระบบประหยัดพลังงานแรงดันต่ำรุ่นถัดไปตาม BLDC
บทความนี้จะแนะนำวิธีการสามวิธีที่สามารถเพิ่มความเร็วให้กับการออกแบบระบบมอเตอร์ BLDC ในขณะเดียวกันก็นำเสนอโซลูชั่นประหยัดพลังงานที่ชาญฉลาดและกะทัดรัดยิ่งขึ้น
โลกกำลังทำงานอย่างหนักเพื่อลดการใช้พลังงาน และโมเมนตัมก็แข็งแกร่งขึ้นเรื่อยๆ หลายประเทศ/ภูมิภาคกำหนดให้เครื่องใช้ในครัวเรือน (ดังแสดงในรูปที่ 1) เป็นไปตามมาตรฐานด้านประสิทธิภาพที่กำหนดโดยองค์กรที่เกี่ยวข้อง เช่น China National Institute of Standardization (CNIS), US Energy Star และ German Blue Angels
เพื่อให้เป็นไปตามมาตรฐานเหล่านี้ นักออกแบบระบบจำนวนมากขึ้นเรื่อยๆ ได้ละทิ้งมอเตอร์เหนี่ยวนำไฟฟ้ากระแสสลับเฟสเดียวที่เรียบง่ายและใช้งานง่ายในการออกแบบของพวกเขา และใช้มอเตอร์ DC แบบไร้แปรงถ่านแรงดันไฟฟ้าต่ำ (BLDC) ที่ประหยัดพลังงานมากขึ้นแทน เพื่อให้มีอายุการใช้งานยาวนานขึ้นและลดเสียงรบกวนในการทำงาน ผู้ออกแบบเครื่องใช้ไฟฟ้าในครัวเรือนขนาดเล็ก เช่น หุ่นยนต์กวาดได้หันมาใช้มอเตอร์ BLDC ที่ล้ำหน้ากว่าในหลายระบบของตน
ในเวลาเดียวกัน ความก้าวหน้าของเทคโนโลยีแม่เหล็กถาวรทำให้การผลิตมอเตอร์ BLDC ง่ายขึ้นอย่างต่อเนื่อง โดยลดขนาดของระบบในขณะที่ให้แรงบิด (โหลด) เท่าเดิม ซึ่งสามารถปรับปรุงประสิทธิภาพและลดเสียงรบกวนของระบบได้ด้วย

รูปที่ 1: เครื่องใช้ในครัวเรือนทั่วไป
การออกแบบระบบโดยใช้มอเตอร์ BLDC เป็นเรื่องที่ท้าทายเพราะว่าโดยปกติฮาร์ดแวร์ที่ซับซ้อนและการออกแบบซอฟต์แวร์ที่ปรับให้เหมาะสมนั้นจำเป็นต่อการควบคุมแบบเรียลไทม์ที่เชื่อถือได้ ทางเลือกหนึ่งในการเร่งความเร็วรอบการออกแบบคือการใช้โมดูลมอเตอร์ BLDC ที่จัดหาโดยซัพพลายเออร์มืออาชีพ แต่โมดูลเหล่านี้ไม่ได้ปรับให้เหมาะกับความต้องการของระบบเฉพาะ ดังนั้น ในการสร้างระบบประสิทธิภาพสูงที่ปรับให้เหมาะสมเพื่อตอบสนองความต้องการใช้งานเฉพาะ ยังคงจำเป็นต้องมีความเข้าใจในเชิงลึกเกี่ยวกับการออกแบบและการควบคุมมอเตอร์ แม้กระทั่งกับโมดูล ในบทความนี้ ผมจะแนะนำวิธีการสามวิธีที่สามารถเร่งความเร็วการออกแบบระบบมอเตอร์ BLDC ในขณะเดียวกันก็นำเสนอโซลูชั่นประหยัดพลังงานที่ชาญฉลาดและกะทัดรัดยิ่งขึ้น
วิธีที่ 1: ไม่จำเป็นต้องตั้งโปรแกรมการควบคุมแบบไร้เซ็นเซอร์
ไดรเวอร์มอเตอร์ที่ไม่มีการตั้งโปรแกรมมีอัลกอริธึมการเปลี่ยนการควบคุมในตัว ดังนั้นจึงไม่จำเป็นต้องพัฒนา บำรุงรักษา และการรับรองซอฟต์แวร์ควบคุมมอเตอร์ ตัวขับมอเตอร์เหล่านี้มักจะได้รับข้อเสนอแนะจากมอเตอร์ (เช่นสัญญาณฮอลล์หรือแรงดันเฟสมอเตอร์และสัญญาณกระแส) คำนวณสมการการควบคุมที่ซับซ้อนในแบบเรียลไทม์เพื่อกำหนดสถานะการขับมอเตอร์ถัดไป และเป็นตัวขับเกทหรือเมทัลออกไซด์ สารกึ่งตัวนำ ทรานซิสเตอร์สนามผล ( MOSFET) และส่วนประกอบส่วนหน้าแบบอะนาล็อกอื่นๆ ให้สัญญาณมอดูเลตความกว้างพัลส์ (ดังแสดงในรูปที่ 2)
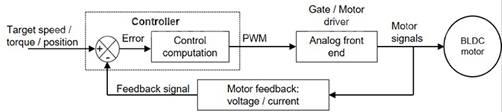
รูปที่ 2: ระบบมอเตอร์ BLDC แบบไม่มีเซนเซอร์ทั่วไป
เมื่อใช้ไดรเวอร์มอเตอร์ที่มีฟังก์ชันการควบคุมแบบไร้เซนเซอร์ในตัว (เช่น ไดรเวอร์มอเตอร์ MCF8316A ที่มีฟังก์ชัน Field Oriented Control (FOC)) สำหรับการควบคุมแบบเรียลไทม์ ไม่จำเป็นต้องมีเซนเซอร์ Hall-Effect ในมอเตอร์ ซึ่งสามารถปรับปรุงระบบได้ ความน่าเชื่อถือและลดต้นทุนรวมของระบบ
ตัวขับมอเตอร์ที่ไม่มีการตั้งโปรแกรมยังสามารถจัดการฟังก์ชันที่สำคัญได้ (เช่น การตรวจจับความผิดปกติของมอเตอร์) และใช้กลไกการป้องกันเพื่อทำให้การออกแบบระบบโดยรวมมีความน่าเชื่อถือมากขึ้น อุปกรณ์เหล่านี้สามารถมาพร้อมกับอัลกอริธึมการควบคุมที่ผ่านการรับรองล่วงหน้าซึ่งดำเนินการโดยหน่วยงานออกใบรับรอง เช่น Underwriters Laboratories ซึ่งช่วยให้ผู้ผลิตอุปกรณ์ดั้งเดิมสามารถร่นระยะเวลาในการออกแบบเครื่องใช้ในบ้านของตนได้
วิธีที่ 2: ใช้ฟังก์ชันควบคุมมอเตอร์อัจฉริยะเพื่อปรับแต่งมอเตอร์อย่างง่ายดาย
ข้อกำหนดพารามิเตอร์ประสิทธิภาพของระบบ (เช่น ความเร็ว ประสิทธิภาพ และสัญญาณรบกวน) แก้ไขได้ยากโดยการปรับมอเตอร์ BLDC ปัญหานี้สามารถแก้ไขได้โดยการพัฒนาอัลกอริธึมควบคุมรูปสี่เหลี่ยมคางหมูแบบไร้เซ็นเซอร์ ซึ่งการสลับจะถูกกำหนดโดยแรงดันไฟฟ้า back-EMF ของมอเตอร์ เพื่อให้การดำเนินการปรับไม่ถูกจำกัดโดยพารามิเตอร์ของมอเตอร์
ตัวขับมอเตอร์ในตัว (เช่น MCT8316A) ที่รวมฟังก์ชันการควบคุมสี่เหลี่ยมคางหมูแบบไร้เซ็นเซอร์สามารถให้ประสิทธิภาพของระบบที่ได้รับการปรับปรุงให้เหมาะสมโดยไม่จำเป็นต้องใช้อินเทอร์เฟซที่ซับซ้อนเพื่อเชื่อมต่อกับไมโครคอนโทรลเลอร์ นอกจากนี้ โปรดทราบว่าในระหว่างกระบวนการปรับแต่งมอเตอร์ ตัวขับมอเตอร์ในตัวจะให้สัญญาณตอบรับ เช่น แรงดันเฟสของมอเตอร์ กระแส และความเร็วของมอเตอร์ที่แสดงบนออสซิลโลสโคป
ในอัลกอริธึม FOC แบบไร้เซนเซอร์ เนื่องจากการผสานรวมเทคโนโลยีการควบคุมขั้นสูง การปรับจูนมอเตอร์จึงสามารถเร่งได้อย่างมาก เช่น โดยการวัดพารามิเตอร์ของมอเตอร์ด้วยตัวเองหรือทำการปรับแต่งลูปควบคุมโดยอัตโนมัติ
ส่วนต่อประสานกราฟิกกับผู้ใช้ (GUI) การปรับแต่งแบบมีคำแนะนำให้ตัวเลือกการเริ่มต้นมอเตอร์เริ่มต้น (ดังแสดงในรูปที่ 3) ซึ่งจะช่วยให้กระบวนการปรับแต่งเสร็จสมบูรณ์ได้อย่างราบรื่นและหมุนมอเตอร์โดยเร็วที่สุด ตัวขับมอเตอร์ที่ไม่จำเป็นต้องตั้งโปรแกรม (เช่น MCF8316A สำหรับ FOC และ MCT8316A สำหรับการควบคุมสี่เหลี่ยมคางหมู) มีตัวเลือกที่กำหนดค่าได้หลายตัวสำหรับการสตาร์ทมอเตอร์และวงรอบปิดและการหยุดมอเตอร์ ด้วยตัวเลือกเหล่านี้ ประสิทธิภาพของมอเตอร์สามารถปรับให้เหมาะสมได้ภายในไม่กี่นาที ซึ่งจะทำให้วงจรการออกแบบสั้นลงอย่างมาก
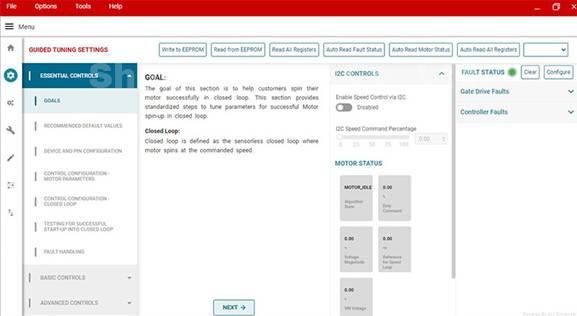
รูปที่ 3: GUI การปรับจูนที่แนะนำ
วิธีที่ 3: ลดขนาด
สำหรับนักออกแบบระบบหลายคน งานสร้างฮาร์ดแวร์ของระบบ BLDC นั้นยากมาก ระบบทั่วไปต้องการตัวขับเกท, MOSFET, แอมพลิฟายเออร์ความรู้สึกปัจจุบัน, ตัวเปรียบเทียบการรับรู้แรงดันไฟฟ้า และตัวแปลงอนาล็อกเป็นดิจิตอล ระบบส่วนใหญ่ต้องการสถาปัตยกรรมพลังงานเฉพาะ (รวมถึงอุปกรณ์เช่นตัวควบคุมการเลื่อนออกต่ำหรือตัวควบคุมบั๊ก DC/DC) เพื่อจ่ายไฟให้กับส่วนประกอบทั้งหมดบนบอร์ด ไดรฟ์ BLDC ในตัวจะรวมส่วนประกอบทั้งหมดเหล่านี้เข้าด้วยกันเพื่อให้มีขนาดกะทัดรัดแต่ใช้งานง่าย ดังแสดงในรูปที่ 4
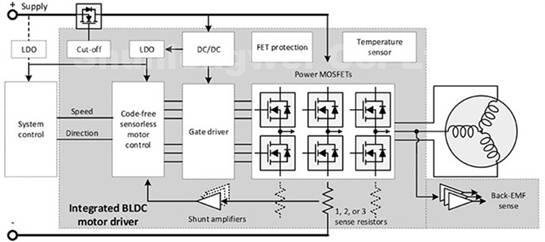
รูปที่ 4: โซลูชันมอเตอร์ BLDC แบบครบวงจร
ตัวขับมอเตอร์ที่มีฟังก์ชันการควบคุมในตัวรวมถึงฟังก์ชันการป้องกัน เช่น การป้องกันกระแสเกินและแรงดันไฟเกินสำหรับ MOSFET และการตรวจสอบอุณหภูมิ ช่วยให้นักออกแบบสามารถจัดหาโซลูชันที่มีประสิทธิภาพได้อย่างง่ายดาย สำหรับการใช้งานมอเตอร์ที่มีการใช้พลังงานน้อยกว่า 70W เช่น หุ่นยนต์กวาด พัดลมเพดานในครัวเรือน หรือปั๊มที่ใช้ในเครื่องซักผ้า สามารถเลือกอุปกรณ์ที่มี MOSFET ในตัวเพื่อลดพื้นที่เค้าโครงเพิ่มเติม อุปกรณ์ MCF8316A และ MCT8316A รองรับกระแสไฟสูงสุด 8A ในแอพพลิเคชั่น 24V สำหรับการใช้งานที่ใช้พลังงานสูง สามารถวาง MOSFET กำลังไฟฟ้าไว้บนบอร์ดเพื่อรวมไดรเวอร์เกทและฟังก์ชั่นการควบคุมมอเตอร์ไว้ในชิปตัวเดียว
แนวคิดที่กล่าวถึงในบทความนี้ช่วยเร่งความเร็วรอบการออกแบบระบบในขณะที่ให้ระบบมอเตอร์ BLDC ที่เล็กกว่าและชาญฉลาดกว่า ด้วยความช่วยเหลือของ MCF8316A และ MCT8316A ซึ่งไม่ต้องการการเขียนโปรแกรมและไดรเวอร์มอเตอร์ BLDC แบบไม่มีเซ็นเซอร์ ระบบควบคุมแบบเรียลไทม์ประสิทธิภาพสูงที่ได้รับการปรับแต่งมาอย่างเหมาะสมสามารถออกแบบได้อย่างรวดเร็ว อุปกรณ์เหล่านี้สามารถจ่ายไฟได้มากถึง 70W สำหรับการใช้งาน 24V ด้วยเทคโนโลยีการควบคุมอัจฉริยะแบบบูรณาการ มอเตอร์ไดรฟ์สองตัวนี้ปรับแต่งได้ง่าย และสามารถใช้เพื่อให้ได้โซลูชันระบบที่มีประสิทธิภาพสูงและเชื่อถือได้ เหมาะอย่างยิ่งสำหรับการสร้างระบบประหยัดพลังงานแรงดันต่ำรุ่นถัดไปตาม BLDC