การวัดสัญญาณรบกวน การแทนที่ LO การทดสอบความเครียดของตัวรับสัญญาณ การวัดกำลัง การกำหนดลักษณะ CCDF และ PAPR และการวัดรูปแบบเสาอากาศมีบทบาทสำคัญในงบประมาณลิงก์ อัตราข้อผิดพลาดบิต และข้อกำหนด SNR
โดย Bob Buston กลุ่มโทรคมนาคมไร้สาย
ระบบดาวเทียมวงโคจรต่ำ (LEO) กำลังถูกปรับใช้สำหรับกรณีการใช้งานที่สำคัญต่อภารกิจในอัตราเร่ง สิ่งนี้นำมาซึ่งข้อกำหนดในการทดสอบที่สำคัญซึ่งหากดำเนินการไม่ถูกต้อง อาจทำให้ประสิทธิภาพของระบบลดลง การใช้เกตเวย์เป็นตัวอย่าง บทความนี้จะพิจารณาการวัดและประเภทของอุปกรณ์ที่จำเป็นสำหรับการทดสอบเลเยอร์ทางกายภาพของอัปลิงก์และดาวน์ลิงก์
การใช้งานดาวเทียมมีตั้งแต่วงโคจรค้างฟ้า (GEO) และวงโคจรกลางโลก (MEO) ไปจนถึง LEO อัตราการติดตั้งดาวเทียม LEO เพิ่มขึ้นอย่างต่อเนื่อง ตัวอย่างเช่น ปัจจุบันระบบ SpaceX Starlink มีดาวเทียมประมาณ 3,500 ดวงในวงโคจรระดับต่ำของโลก ในเดือนธันวาคม พ.ศ. 2022 FCC ได้อนุมัติการติดตั้งดาวเทียมรุ่นต่อไปจำนวน 7,500 ดวง เนื่องจากความหน่วงแฝงที่ต่ำของระบบ LEO พวกเขาจึงกลายเป็นระบบทางเลือกสำหรับการใช้งานทั้งทางพลเรือนและทางทหาร รวมถึงแต่ไม่จำกัดเพียง 5G และการสื่อสารในสนามรบทางทหาร การใช้ระบบ Starlink ของยูเครนแม้ว่าจะจำกัด แต่ก็เป็นตัวอย่างล่าสุดของระบบดังกล่าว การใช้ระบบ LEO สำหรับการดำเนินการประเภทนี้นำไปสู่ข้อกำหนดสำหรับการทดสอบที่มีความแม่นยำสูงเพื่อให้มั่นใจถึงการทำงานที่เชื่อถือได้

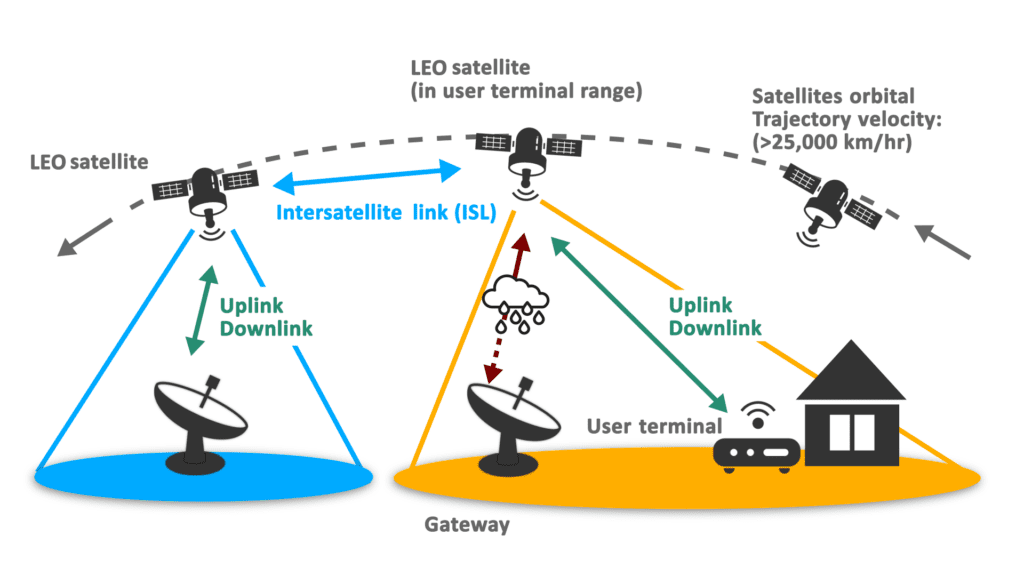
สถานีภาคพื้นดินหรือที่เรียกว่าเกตเวย์เมื่อเชื่อมต่อกับเครือข่ายภาคพื้นดินเป็นองค์ประกอบสำคัญของการดำเนินการอัปลิงค์และดาวน์ลิงก์ดังที่แสดงใน รูป 1. โมดูลต่างๆ ที่ประกอบด้วยเส้นทางอัปลิงก์และดาวน์ลิงก์จำเป็นต้องมีการทดสอบที่หลากหลายเพื่อให้มั่นใจถึงการทำงานที่เชื่อถือได้ การทดสอบดังกล่าวอาจดำเนินการในระหว่างการพัฒนาและการผลิตโมดูล ระหว่างการรวมเข้าด้วยกัน ซึ่งเป็นส่วนหนึ่งของการค้นหาข้อบกพร่อง และระหว่างการตรวจสอบการปฏิบัติงาน รูป 2 แสดงบล็อกไดอะแกรมอย่างง่ายของเส้นทาง RF และไมโครเวฟในเกตเวย์ และตัวอย่างตำแหน่งที่จะใช้อุปกรณ์ทดสอบเพื่อประเมินประสิทธิภาพของชั้นกายภาพ

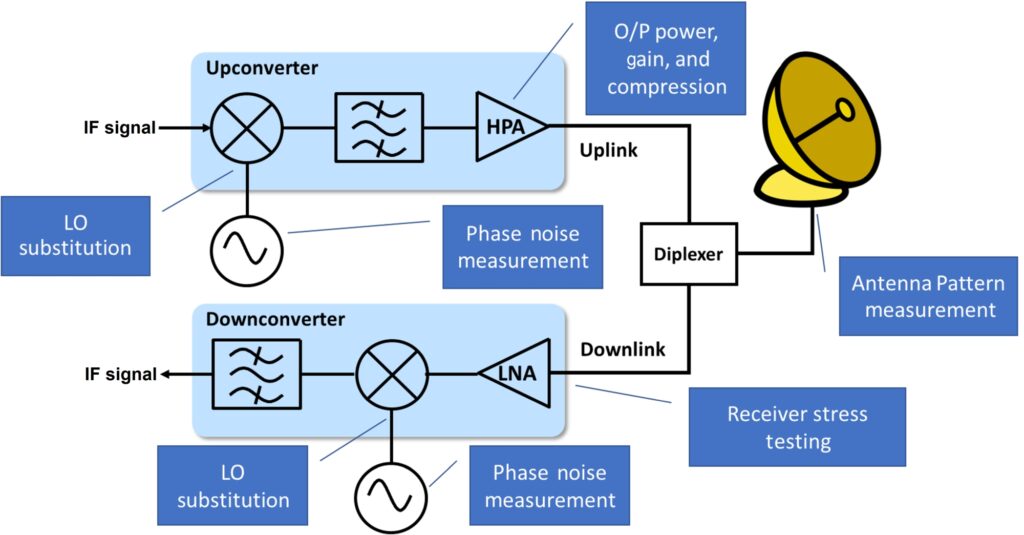
1 ตาราง แสดงข้อมูลเพิ่มเติมและความสำคัญของการวัด ณ จุดที่แสดงในรูปที่ 2
|
||||||||||||||||||||||||||||
| ตารางที่ 1. หกกรณีการใช้งานที่สำคัญในการตรวจสอบประสิทธิภาพของเลเยอร์กายภาพอัปลิงก์และดาวน์ลิงก์ |
ต่อไป เราจะดูรายละเอียดกรณีการใช้งานเหล่านี้เพิ่มเติม


การวัดสัญญาณรบกวนเฟส
มีหลายปัจจัยที่ส่งผลต่อประสิทธิภาพของอัพและดาวน์ลิงก์ของดาวเทียม และหลายปัจจัย เช่น ความบริสุทธิ์ของสัญญาณของออสซิลเลเตอร์ในพื้นที่ ข้อผิดพลาดบิตผลกระทบ สัญญาณรบกวนเฟสที่มากเกินไปจะเพิ่มขนาดเวกเตอร์ข้อผิดพลาด (EVM) และอาจนำไปสู่สัญลักษณ์และด้วยเหตุนี้จึงเกิดข้อผิดพลาดบิต เนื่องจากตำแหน่งของจุดกลุ่มดาวบนแผนภาพ IQ ข้ามขอบเขตการตัดสินใจสัญลักษณ์ดังที่แสดงใน รูป 3.
เมื่อทำการวัดนี้ ให้ถามตัวคุณเองว่าคุณจำเป็นต้องทำการตรวจวัดสัญญาณรบกวนเฟสสัมบูรณ์ของออสซิลเลเตอร์เฉพาะที่ (LO) เพื่อวัดสัญญาณรบกวนเพิ่มเติมจากเครื่องขยายเสียงหรือไม่
การทดแทน LO
การทดแทน LO เป็นเทคนิคสำคัญเมื่อทดสอบตัวแปลงด้านบนและตัวแปลงด้านล่างในระบบสื่อสาร ช่วยให้คุณประเมินสายสัญญาณได้โดยไม่ต้องใช้คุณลักษณะของ LO มาปิดบังประสิทธิภาพ เทคนิคนี้ยังช่วยให้คุณระบุได้ว่า LO เป็นสาเหตุของปัญหาเมื่อระบบทำงานไม่ถูกต้องหรือไม่
การทดสอบความเครียดของตัวรับ
ไม่ว่าจะอยู่ในเกตเวย์หรือในดาวเทียม สิ่งสำคัญคือต้องทดสอบเครื่องรับเพื่อให้แน่ใจว่าสามารถรับสัญญาณและแยกสัญญาณได้อย่างถูกต้องภายใต้สภาวะที่บกพร่อง เพื่อให้แน่ใจว่าประสิทธิภาพที่สังเกตได้ในห้องปฏิบัติการจะถูกทำซ้ำหลังจากการปรับใช้ เครื่องรับการสื่อสารผ่านดาวเทียมจะต้องทำงานในสภาวะการรบกวน RF ในโลกแห่งความเป็นจริง การทดสอบเหล่านี้ดำเนินการที่ IF และ RF เมื่อทำ IF คุณจะต้อง:
- เครื่องกำเนิดสัญญาณรบกวนอัตราส่วนสัญญาณต่อสัญญาณรบกวน (SNR) เพื่อตั้งค่าระดับของ SNR หรือ Eb/No
- เครื่องทดสอบอัตราความผิดพลาดบิต (BERT) IF อัปลิงก์จะถูกวนกลับไปที่ IF ของดาวน์ลิงก์ผ่านตัวสร้าง SNR หากการทดสอบอยู่ที่ความถี่ RF/คลื่นไมโครเวฟ จำเป็นต้องมีตัวแปลลูปทดสอบเพื่อทำให้ลูปย้อนกลับเสร็จสมบูรณ์ รูป 4 แสดงการตั้งค่าการทดสอบทั่วไปสำหรับทั้งสองกรณี

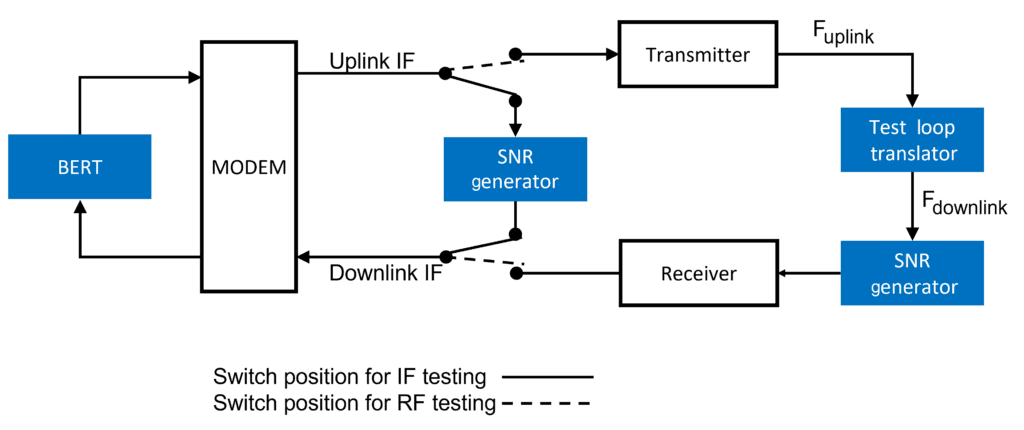
เพื่อทำการทดสอบ เครื่องสร้าง SNR จะเพิ่มปริมาณเสียงรบกวนที่แม่นยำเพื่อสร้างระดับ SNR ที่ต้องการ ระดับของสัญญาณรบกวนจะเพิ่มขึ้นจนกว่าจะถึงขีดจำกัดอัตราความผิดพลาดที่ต้องการตามที่ BERT ตรวจสอบ นอกจากนี้ เครื่องกำเนิดสัญญาณอาจใช้เพื่อฉีดสัญญาณรบกวน
การทดสอบกำลังขับ อัตราขยาย และกำลังอัด
สิ่งนี้นำเราไปสู่หนึ่งในการวัด RF และไมโครเวฟพื้นฐานที่สุด: กำลัง การวัดพลังงานยังสามารถเปิดเผยปัญหาสำคัญบางประการที่อาจส่งผลกระทบต่อประสิทธิภาพของระบบ รูป 5 แสดงการตั้งค่าสำหรับการประเมินประสิทธิภาพของเครื่องขยายสัญญาณกำลังสูงอัปลิงค์ (HPA)


นอกจากการวัดอัตราขยายและการสูญเสียผลตอบแทนแล้ว เซ็นเซอร์พลังงาน P2 ยังให้การวัดระดับพลังงานเอาต์พุตอีกด้วย คุณยังสามารถใช้การตั้งค่านี้เพื่อประเมินระดับการบีบอัดสัญญาณที่เกิดจาก HPA
ในอดีต การเชื่อมโยงผ่านดาวเทียมใช้รูปแบบการมอดูเลตอัตราส่วนพลังงานสูงสุดต่อค่าเฉลี่ย (PAPR) ที่ต่ำ อย่างไรก็ตาม แอปพลิเคชันที่ใหม่กว่า เช่น เครือข่าย 5G ที่ไม่ใช่ภาคพื้นดิน (NTN) จำเป็นต้องใช้แผนการมอดูเลตลำดับที่สูงกว่าและ OFDM ซึ่งหมายความว่า PAPR ของสัญญาณจะสูงขึ้น และจำเป็นต้องดูแลว่าการบีบอัดของแอมพลิฟายเออร์จะไม่บิดเบือนพีคที่นำไปสู่สัญลักษณ์ และด้วยเหตุนี้จึงมีข้อผิดพลาดบิต มีการศึกษาหลายครั้งเกี่ยวกับผลของการลด PAPR ต่ออัตราความผิดพลาดของบิตเนื่องจากการบีบอัดสัญญาณ การศึกษาโดย Usman et al แสดงให้เห็นว่าการลด PAPR จาก 10 dB เป็น ~4dB จะลด BER จาก ~8 x 10-4 เป็น ~1.3 x 10-3 สำหรับ SNR ที่ 10 dB ที่เครื่องรับ สิ่งนี้เน้นย้ำถึงความสำคัญของการรู้ถึงผลกระทบของการบิดเบือนของแอมพลิฟายเออร์ต่อ PAPR และการมีวิธีสังเกตอย่างชัดเจน
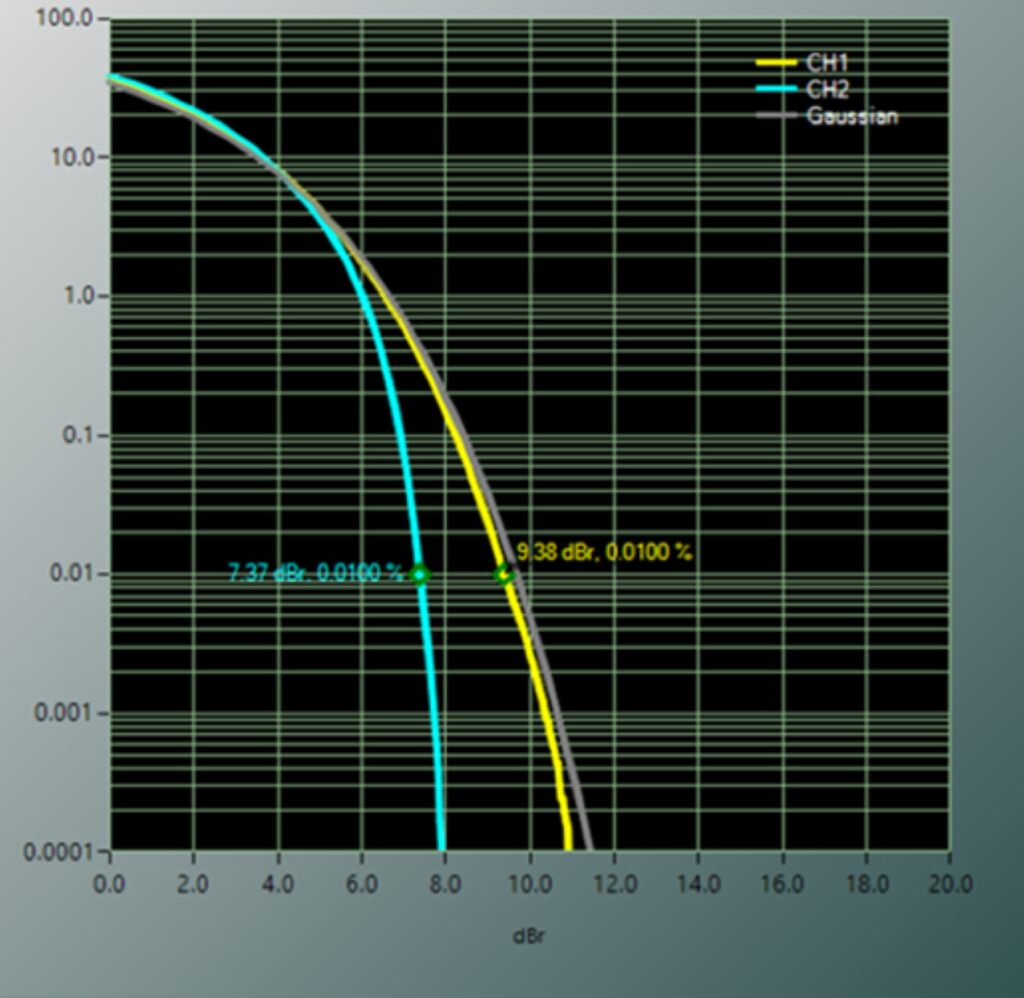
คุณสามารถประเมินความไม่เป็นเชิงเส้นของแอมพลิฟายเออร์และการบีบอัดโดยใช้เซ็นเซอร์ตรวจจับกำลังเฉลี่ยหรือตัววิเคราะห์เครือข่ายเพื่อรับพล็อตของ POUT เทียบกับ PIN อย่างไรก็ตาม สิ่งนี้ไม่ได้เปิดเผยผลกระทบต่อ PAPR ของสัญญาณ m-QAM OFDM ที่ซับซ้อน โชคดีที่มีวิธีง่ายๆ ที่คุณสามารถนำไปใช้ได้ นี่คือการใช้เซ็นเซอร์พลังงานสูงสุดที่มีอัตราการสุ่มตัวอย่างสูงพร้อมแบนด์วิธวิดีโอที่กว้างกว่าช่องสัญญาณที่กำลังวัด ตัวอย่างพลังงานเหล่านี้ใช้เพื่อกำหนดสัญญาณ PAPR และพล็อตเส้นโค้งฟังก์ชันการกระจายเสริม (CCDF) เส้นโค้ง CCDF เป็นพล็อตของความน่าจะเป็นของสัญญาณมอดูเลตที่เกิน PAPR เฉพาะ การตั้งค่าทำได้ง่ายและใช้เซ็นเซอร์พลังงาน P1 และ P2 ดังแสดงในรูปที่ 6; เซ็นเซอร์ต้องวัดค่าสูงสุดและไม่ใช่แค่พลังงานเฉลี่ย การใช้เซ็นเซอร์เหล่านั้นร่วมกับซอฟต์แวร์การวิเคราะห์ที่เหมาะสม ให้ CCDF ที่อินพุตและเอาต์พุตของเครื่องขยายเสียง ซึ่งเผยให้เห็นการลด PAPR
รูป 6 แสดงผลลัพธ์นี้โดยใช้เซ็นเซอร์พลังงานสูงสุด Boonton RTP5000 และซอฟต์แวร์ Boonton Power Analyzer แกน y แสดงความน่าจะเป็นที่จะเกินระดับ PAPR ที่ระบุบนแกน x รูปที่ 6 แสดงให้เห็นว่า 99.99% ของเวลา สัญญาณอินพุตมี PAPR ที่ ~9.4 dB ในขณะที่การบีบอัดเครื่องขยายเสียงลด PAPR สัญญาณเอาต์พุตเหลือ ~7.4 dB ซึ่งอาจทำให้เกิดข้อผิดพลาดบิตได้

การวัดรูปแบบเสาอากาศ
สุดท้าย มาดูการวัดรูปแบบสายอากาศกัน ไม่ว่าเสาอากาศจะเป็นจานบังคับทิศทางด้วยกลไกหรือแผง phased-array บังคับเลี้ยวด้วยระบบอิเล็กทรอนิกส์ที่มีความสามารถในการเข้าถึงหลายจุดเชิงพื้นที่แบบหลายลำแสงและความสามารถในการชี้ค่าว่างไปยังสัญญาณรบกวน คุณต้องระบุลักษณะเฉพาะของรูปแบบเสาอากาศ โดยปกติจะแสดงด้วยแผนภาพเชิงขั้วในระนาบราบและระนาบเอียง เซ็นเซอร์วัดกำลังเป็นวิธีที่ง่ายและสะดวกในการวัดค่าเหล่านี้
เสาอากาศติดตั้งอยู่บนจานเสียง เซ็นเซอร์พลังงานหนึ่งตัวเชื่อมต่อกับฟีดเพื่อตรวจสอบระดับพลังงานการส่งเพื่อให้แน่ใจว่าคงที่ในระหว่างการหมุนเสาอากาศ เซ็นเซอร์กำลังตัวที่สอง ควบคู่กับฮอร์นเกนมาตรฐาน อยู่ในช่องไกลของเสาอากาศ การวัดที่ได้จากเซ็นเซอร์พลังงานนี้ใช้เพื่อสร้างผังรูปแบบเสาอากาศ เพื่อให้ได้ความละเอียดเชิงมุมและความเร็วในการวัดที่ผสมผสานกันอย่างเหมาะสม ควรเลือกเซ็นเซอร์วัดกำลังที่ให้อัตราการวัดที่รวดเร็ว
เราได้สัมผัสกับการวัดชั้นกายภาพที่สำคัญหลายรายการที่ช่วยให้เกิดความมั่นใจว่าระบบแต่ละบล็อกและระบบโดยรวมจะทำงานได้อย่างน่าเชื่อถือเมื่อปรับใช้ เทคนิคการวัดที่นำเสนอนี้ไม่ได้ใช้เฉพาะกับเกตเวย์เท่านั้น คุณสามารถใช้เทคนิคที่คล้ายกันกับเทอร์มินัลและดาวเทียมได้
Bob Buxton เป็นผู้จัดการผลิตภัณฑ์ของ Wireless Telecom Group ซึ่งเป็นบริษัททดสอบและวัดผลที่ประกอบด้วยแบรนด์ Boonton, Noisecom และ Holzworth ก่อนหน้านี้ Bob เคยดำรงตำแหน่งในด้านการวิจัยและพัฒนาและการจัดการผลิตภัณฑ์ให้กับ MACOM, Marconi, Advantest, Tektronix และ Anritsu ประสบการณ์ด้านการวิจัยและพัฒนาของเขาเกี่ยวข้องกับระบบย่อยไมโครเวฟและการออกแบบซินธิไซเซอร์ Bob สำเร็จการศึกษาระดับปริญญาโทสาขาไมโครเวฟและทัศนศาสตร์สมัยใหม่จาก University College, London และปริญญาโทสาขาบริหารธุรกิจจาก George Fox University, Newberg Oregon เขาเป็นวิศวกรชาร์เตอร์และสมาชิกของสถาบันวิศวกรรมศาสตร์และ เทคโนโลยี.