L'efficacité énergétique devient de plus en plus importante pour résoudre les problèmes environnementaux mondiaux et réaliser une société durable qui rend les technologies économes en énergie de plus en plus importantes dans le monde. Les moteurs consomment souvent la plus grande quantité d'énergie dans les applications, nous pouvons donc facilement réduire les pertes de puissance et contribuer aux économies d'énergie grâce à un contrôle d'onduleur de haute précision.
Pour y parvenir, Renesas a développé deux nouveaux microcontrôleurs de contrôle moteur dans la famille RA de microcontrôleurs 32 bits avec noyau Arm®. (Figure 1) La gamme de solutions hautes performances et de boîtiers compacts est la mieux adaptée aux applications grand public, industrielles et autres qui nécessitent un contrôle d'onduleur de haute précision malgré les contraintes d'espace du système. Les groupes RA4T1 et RA6T3 permettent de réduire la consommation d'énergie dans diverses applications, contribuent à réduire la consommation d'énergie et aident à améliorer l'environnement mondial.

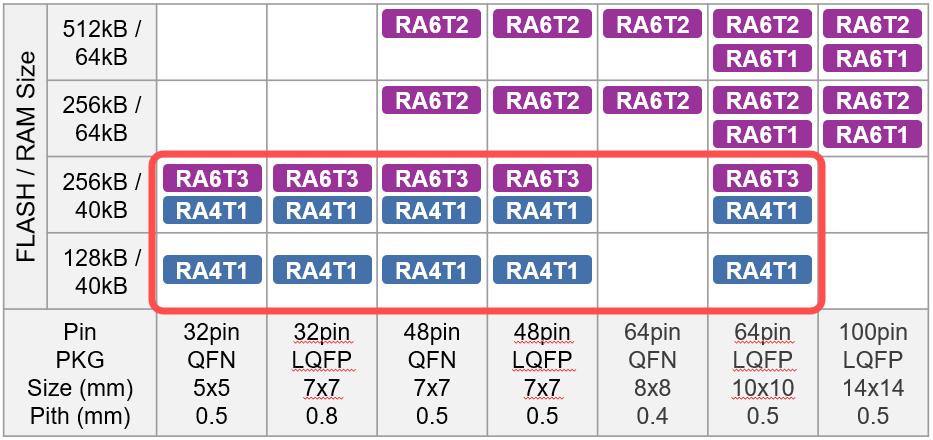
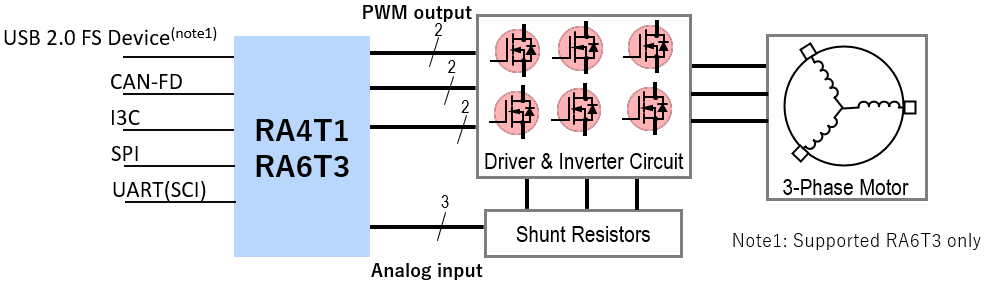
Les microcontrôleurs RA4T1 et RA6T3 sont optimisés pour un équilibre entre performances, fonctionnalités et prix pour le contrôle d'un seul onduleur. Ceux-ci sont équipés d'un noyau Arm® Cortex®-M33 fonctionnant jusqu'à 200 MHz (100 MHz pour RA4T1) avec des fonctionnalités permettant de réaliser un contrôle d'onduleur de haute précision, y compris une unité de fonction trigonométrique d'accélérateur matériel, une minuterie 16 bits prenant en charge une sortie PWM complémentaire, Convertisseur A/N 12 bits avec fonction d'échantillonnage et de maintien à 3 canaux dédiée, ainsi qu'un amplificateur à gain programmable et un comparateur. Une fonction de sécurité pour protéger le circuit de l'onduleur, une fonction d'activation de sortie de port, est également fournie pour arrêter la sortie PWM. Le périphérique USB 2.0 FS (RA6T3 uniquement), CAN FD et I3C, entre autres interfaces de communication, sont inclus.
Les groupes RA4T1 et RA6T3 offrent un équilibre optimal entre performances, fonctionnalités et prix, et peuvent être utilisés dans une grande variété d'applications de commande d'onduleur grand public et industrielles. Par exemple, le plus petit boîtier du groupe RA4T1 est un QFN 5 x 5 mm à 32 broches, qui convient aux petits outils électriques. Le groupe RA6T3 plus puissant peut effectuer simultanément des fonctions de contrôle et de communication à grande vitesse et en temps réel, ce qui le rend adapté aux applications telles que les vélos électriques, qui nécessitent un contrôle moteur et une communication avec un l’affichage panneau. Ces appareils conviennent également à des applications telles que les aspirateurs, les cuisinières à induction, les machines à laver, les ventilateurs, les pompes, les onduleurs à usage général, les imprimantes thermiques et les petits robots.

L'environnement d'évaluation RA4T1 et RA6T3 comprend un choix d'environnements de développement intégrés, notamment e² studio, Keil® MDK et IAR EWARM, qui peuvent être utilisés pour l'ensemble de la famille RA en général. Le progiciel flexible (FSP), qui comprend BSP, le pilote HAL, le middleware pour le contrôle moteur et divers systèmes d'exploitation embarqués, est disponible pour développer des systèmes embarqués utilisant la famille RA. FSP facilite la mise en œuvre de logiciels complexes et contribue à raccourcir le temps de développement de logiciels.
Nous fournissons des kits de développement de commande de moteur MCK-RA4T1 et MCK-RA6T3 pour une évaluation facile des systèmes de commande de moteur. Les kits comprennent une carte CPU, une carte onduleur, un moteur BLDC et un exemple de code comme décrit ci-dessous. La carte CPU seule peut être utilisée pour évaluer les fonctions périphériques du MCU, et comme elle est équipée d'un connecteur Pmod, elle peut être connectée à un capteur carte, communication sans fil module ou autres, offrant une excellente extensibilité.
Nous fournissons l'outil d'assistance au développement de logiciels QE for Motor pour une utilisation facile des paramètres, du réglage et de l'analyse requis pour le développement de logiciels de commande de moteur en fonction du flux de travail (en haut à gauche sur la figure 3). Il permet une configuration efficace du middleware et des pilotes du moteur tout en vérifiant le diagramme de structure hiérarchique (en haut à droite sur la figure 3) en conjonction avec FSP.
QE for Motor est lié à un outil d'aide au développement de la commande moteur, le Renesas Motor Workbench. Cela permet d'afficher les signaux de commande du moteur sur un PC comme un oscilloscope et de mettre à jour les variables de commande du moteur sur l'interface graphique sans arrêter le moteur (Fig. 3, en bas à gauche). En d'autres termes, l'outil QE for Motor permet le développement de logiciels dans un environnement transparent et contribue à réduire le temps de développement.


De plus, la liste suivante est un exemple de code pour le contrôle moteur qui fonctionne avec cet environnement et ces notes d'application. D'autres options continueront d'être ajoutées à l'avenir.
Notes d'application:
- Contrôle vectoriel sans capteur avec trois shunts pour moteur synchrone à aimants permanents
- Contrôle vectoriel sans capteur avec un shunt pour moteur synchrone à aimants permanents
- Contrôle vectoriel pour moteur synchrone à aimants permanents avec encodeur
- Commande conductrice à 120 degrés du moteur synchrone à aimant permanent à l'aide de capteurs à effet Hall
- Commande conductrice à 120 degrés sans capteur du moteur synchrone à aimant permanent
- Contrôle vectoriel pour moteur synchrone à aimants permanents avec capteur inductif
Nous vous recommandons vivement d'essayer les kits de développement MCK-RA4T1, MCK-RA6T3 et l'outil d'aide au développement du logiciel de contrôle moteur QE for Motor. Nous sommes convaincus que vous apprécierez la convivialité de ces environnements de développement et constaterez par vous-même que les microcontrôleurs RA4T1 et RA6T3 excellent dans les systèmes de commande de moteur. Faites-nous part de votre expérience de travail avec les outils.
Visitez les pages produit et kit pour plus d'informations, y compris la documentation technique et les échantillons :
- Fiche produit RA4T1
- Page du kit MCK-RA4T1
- Fiche produit RA6T3
- Page du kit MCK-RA6T3
- Outil de développement QE for Motor
Solutions combinées gagnantes
Pour simplifier davantage le développement de la commande de moteur, nous proposons également des solutions Winning Combination qui utilisent des produits Renesas complémentaires, tels que des circuits intégrés de commande de grille et d'alimentation.
- Commande de moteur BLDC compacte et haute puissance
- Solution de système de vélo électrique
- Conversion de puissance numérique avec Totem Pole Interleaved PFC
En plus des microcontrôleurs basés sur le cœur Arm®, Renesas propose également différentes options de plate-forme pour prendre en charge une grande variété d'applications de commande de moteur. Les microcontrôleurs RISC-V ASSP fournissent une solution complète pour les utilisateurs développant sur la plate-forme RISC-V. Un logiciel d'application pré-développé est programmé sur l'appareil lors de la production en usine, avec un code d'application spécialisé développé par des IDH (maisons de conception indépendantes) permettant aux utilisateurs d'ajouter des fonctionnalités sophistiquées de contrôle de moteur orientées sur le terrain sans aucun effort en termes de développement, de test et de validation du mise en œuvre.
De plus, le microcontrôleur RX26T est idéal pour les utilisateurs développant sur la plate-forme propriétaire Renesas. En utilisant le même kit de commande de moteur que les microcontrôleurs RA, les utilisateurs peuvent facilement faire évoluer le développement sur différentes plates-formes.