יעילות אנרגטית הופכת חשובה יותר ויותר כדי לפתור בעיות סביבתיות גלובליות ולהגשמת חברה בת קיימא שהופכת טכנולוגיות לחיסכון באנרגיה חשובה יותר בעולם. מנועים צורכים לעתים קרובות את כמות החשמל הגדולה ביותר ביישומים, כך שנוכל להפחית בקלות את אובדן החשמל ולתרום לחיסכון באנרגיה באמצעות בקרת מהפך ברמת דיוק גבוהה.
כדי להשיג זאת, Renesas פיתחה שני MCUs חדשים לבקרת מנוע במשפחת ה-RA של מיקרו-בקרי 32-bit עם ליבת Arm®. (איור 1) מערך הפתרונות בעלי הביצועים הגבוהים והחבילות הקומפקטיות מתאים ביותר ליישומים צרכניים, תעשייתיים ויישומים אחרים הדורשים בקרת מהפך ברמת דיוק גבוהה למרות אילוצי שטח המערכת. קבוצות RA4T1 ו-RA6T3 מאפשרות צריכת חשמל נמוכה יותר ביישומים שונים, תורמות לצריכת אנרגיה נמוכה יותר ומסייעות בשיפור הסביבה הגלובלית.

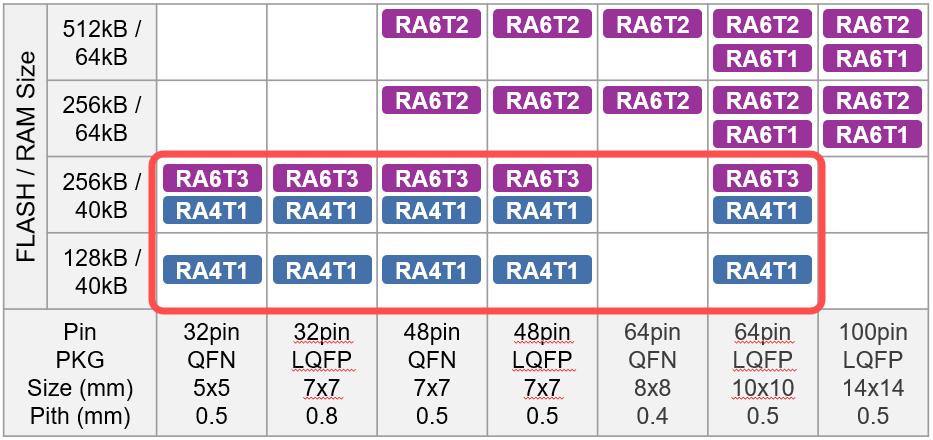
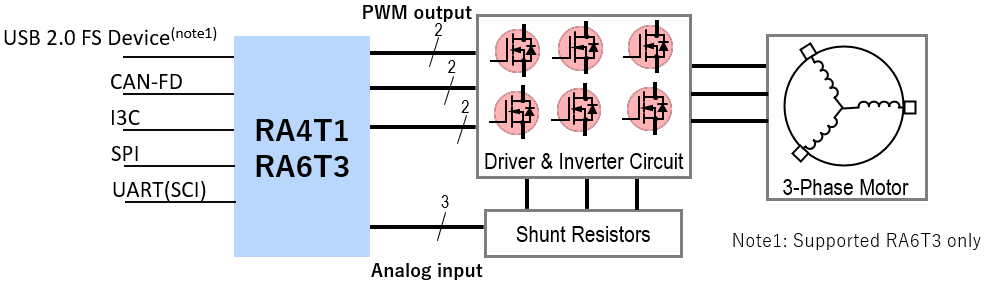
RA4T1 ו-RA6T3 MCUs מותאמים לאיזון של ביצועים, פונקציונליות ומחיר עבור בקרת מהפך יחיד. אלה מצוידים בליבת Arm® Cortex®-M33 הפועלת במהירות של עד 200 מגה-הרץ (100 מגה-הרץ עבור RA4T1) עם תכונות למימוש בקרת מהפך ברמת דיוק גבוהה, כולל יחידת פונקציה טריגונומטרית מאיץ חומרה, טיימר 16 סיביות התומך בפלט PWM משלים, ממיר A/D 12 סיביות עם פונקציית דגימה והחזקה ייעודית של 3 ערוצים, כמו גם מגבר הגבר והשוואה הניתנים לתכנות. תכונת בטיחות להגנה על מעגל המהפך, פונקציית הפעלת פלט יציאה, מסופקת גם כדי לכבות את פלט PWM. התקן USB 2.0 FS (RA6T3 בלבד), CAN FD ו-I3C, בין שאר ממשקי התקשורת כלולים.
שתי קבוצות RA4T1 ו-RA6T3 מציעות את האיזון האופטימלי בין ביצועים, פונקציונליות ומחיר, וניתן להשתמש בהן במגוון רחב של יישומי בקרת ממירים צרכניים ותעשייתיים. לדוגמה, החבילה הקטנה ביותר של קבוצת RA4T1 היא 5X5 מ"מ QFN 32 פינים, המתאים לכלים חשמליים קטנים. קבוצת ה-RA6T3 החזקה יותר יכולה לבצע פונקציות בקרה ותקשורת במהירות גבוהה בזמן אמת, מה שהופך אותה מתאימה ליישומים כמו אופניים חשמליים, הדורשים בקרת מנוע ותקשורת עם תצוגה לוּחַ. מכשירים אלו מתאימים גם ליישומים כמו שואבי אבק, תנורי אינדוקציה, מכונות כביסה, מאווררים, משאבות, ממירים לשימוש כללי, מדפסות תרמיות ורובוטים קטנים.

סביבת ההערכה RA4T1 ו-RA6T3 כוללת מבחר של סביבות פיתוח משולבות, כולל e² studio, Keil® MDK ו-IAR EWARM, שניתן להשתמש בהם עבור כל משפחת RA באופן כללי. חבילת התוכנה הגמישה (FSP), הכוללת BSP, מנהל התקן HAL, תוכנת ביניים לבקרת מנוע ומערכות הפעלה משובצות שונות, זמינה לפיתוח מערכות משובצות באמצעות משפחת ה-RA. FSP מאפשר הטמעת תוכנה מורכבת ותורם לקיצור זמן פיתוח התוכנה.
אנו מספקים ערכות פיתוח בקרה מוטורית של MCK-RA4T1 ו-MCK-RA6T3 להערכה קלה של מערכות בקרת מנוע. הערכות כוללות לוח מעבד, לוח אינוורטר, מנוע BLDC וקוד לדוגמה כמתואר להלן. לוח המעבד לבדו יכול לשמש להערכת פונקציות היקפי של MCU, ומכיוון שהוא מצויד במחבר Pmod, ניתן לחבר אותו ל- חיישן לוח, תקשורת אלחוטית מודול או אחרים, המספקים יכולת הרחבה מצוינת.
אנו מספקים את כלי התמיכה בפיתוח תוכנה QE for Motor לתפעול קל של הגדרות, כוונון וניתוח הנדרשים לפיתוח תוכנת בקרת מוטור בהתאם לזרימת העבודה (משמאל למעלה באיור 3). הוא מאפשר תצורה יעילה של תוכנת ביניים ומנהלי התקנים של מנוע תוך בדיקת דיאגרמת המבנה ההיררכי (מימין למעלה באיור 3) בשילוב עם FSP.
QE for Motor מקושר לכלי תמיכה לפיתוח בקרת מוטורית, Renesas Motor Workbench. זה מאפשר להציג אותות בקרת מנוע במחשב כמו אוסילוסקופ וניתן לעדכן משתני בקרת מנוע ב-GUI מבלי לעצור את המנוע (איור 3, שמאל למטה). במילים אחרות, הכלי QE for Motor מאפשר פיתוח תוכנה בסביבה חלקה ומסייע לקצר את זמן הפיתוח.


בנוסף, הרשימה הבאה היא קוד לדוגמה עבור בקרת מוטור שעובדת עם סביבה זו והערות יישומים אלה. אפשרויות נוספות ימשיכו להתווסף בעתיד.
הערות יישום:
- בקרת וקטור ללא חיישן עם שלושה שאנטים למנוע סינכרוני מגנט קבוע
- בקרת וקטור ללא חיישן עם shunt אחד למנוע סינכרוני מגנט קבוע
- בקרת וקטור למנוע סינכרוני מגנט קבוע עם מקודד
- בקרת מוליכות של 120 מעלות של מנוע סינכרוני מגנטי קבוע באמצעות חיישני הול
- בקרת מוליכות ללא חיישן 120 מעלות של מנוע סינכרוני מגנטי קבוע
- בקרת וקטור למנוע סינכרוני מגנטי קבוע עם חיישן אינדוקטיבי
אנו ממליצים בחום לנסות את ערכות הפיתוח MCK-RA4T1, MCK-RA6T3 ואת כלי התמיכה לפיתוח תוכנת בקרת מוטור QE for Motor. אנו בטוחים שתעריכו את הידידותיות למשתמש של סביבות פיתוח אלו ותראו בעצמכם ש-RA4T1 ו-RA6T3 MCUs מצטיינים במערכות בקרת מנוע. ספר לנו על הניסיון שלך בעבודה עם הכלים.
בקר בדפי המוצר והערכה למידע נוסף, כולל תיעוד טכני ודוגמאות:
- עמוד מוצר RA4T1
- עמוד ערכת MCK-RA4T1
- עמוד מוצר RA6T3
- עמוד ערכת MCK-RA6T3
- כלי פיתוח מוטורי QE
פתרונות שילוב מנצחים
כדי לפשט עוד יותר את פיתוח הבקרה המוטורית, אנו מציעים גם פתרונות שילוב מנצח המשתמשים במוצרים משלימים של Renesas, כגון מנהלי שער ו-ICs של ספק כוח.
- בקרת מנוע BLDC בעוצמה גבוהה, קומפקטית
- פתרון מערכת אופניים חשמליים
- המרת כוח דיגיטלי עם PFC משולבים בקוטב
בנוסף ל-MCU מבוססי ליבות Arm, Renesas מספקת גם אפשרויות פלטפורמה שונות לתמיכה במגוון רחב של יישומי בקרת מנוע. ה-RISC-V ASSP MCUs מספקים פתרון מלא למשתמשים המפתחים בפלטפורמת RISC-V. תוכנת יישומים מפותחת מראש מתוכנתת על המכשיר בייצור המפעל, עם קוד יישומים מיוחד שפותח על ידי IDHs (בתי עיצוב עצמאיים) המאפשרים למשתמשים להוסיף פונקציונליות בקרה מוטורית מתוחכמת מוכוונת שטח ללא כל מאמץ במונחים של פיתוח, בדיקה ואימות של יישום.
בנוסף, ה-RX26T MCU אידיאלי עבור משתמשים המפתחים על פלטפורמת Renesas הקניינית. באמצעות אותה ערכת בקרת מנוע כמו RA MCUs, משתמשים יכולים בקלות להתאים את הפיתוח על פני פלטפורמות שונות.