概要
1900次元でオブジェクトを検出するためのRFパルスの使用は、XNUMX年代初頭に始まりました。 初期のアプリケーションは、軍事要件、特に船や航空機の検出に焦点を当てていました。 今日、レーダーは、航空機の追跡、天候の監視、テニスボールから車までのあらゆるものの速度の検出など、軍事、商業、および研究の幅広いアプリケーションで使用されています。 レーダーの基本原理は変更されていません。RFエネルギーの短いバーストが送信され、受信機は遠くの物体から跳ね返ったエネルギーの検出を待機します。
一度設置されると、多くのレーダーは何十年にもわたって中断することなく稼働することが期待されています。 時間の経過とともにパフォーマンスが低下しないようにするには、主要なパフォーマンスメトリックを定期的に測定する必要があります。 監視されるパフォーマンスの主要な領域の181つは、送信されたRFパルスの特性です。 IEEEは、パルスの重要なパラメータの測定方法に関する仕様、「IEEE Std 2011-XNUMX、遷移、パルス、および関連する波形の標準」を公開しています。 この規格は、どのパラメータを測定する必要があり、それらの測定値をどのように計算するかを正確に指定します。
オプション2090パルスアナライザーを備えたFieldMaster Pro MS0421Aは、完全なパルス特性を表示し、すべての一般的なレーダーパラメーターの詳細な数値結果を提供します。 このアプリケーションノートは、空港監視レーダーと気象レーダーのフィールド測定での使用に焦点を当てています。
空港監視レーダー
1998年、米国連邦航空局(FAA)は、航空機の動きを追跡し、さらにいくつかの気象情報を提供するASR-11と呼ばれる新しい空港監視レーダーを導入しました。 現在、これらのレーダーは400を超えて米国全土に配備されています。
| ASR-11空港監視レーダー | |
| メーカー | レイセオン |
| 周波数 | 2.7〜2.9 GHz |
| レンジ | 60マイル(〜97 km) |
| 最大電力 | 25 kW |
| パルス幅 | 1 µs〜80 µs |
| パルス繰り返し周波数 | 〜1ミリ秒 |
| 回転速度 | 12.5 RPM |
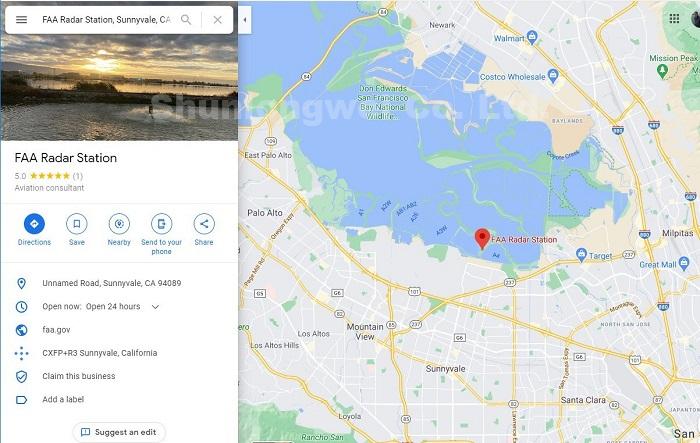
これらのレーダーからの高いピークパワーにより、レーダーはその場所から何マイルも離れた場所を非常に簡単に検出できます。 たとえば、サンフランシスコベイエリアをカバーするFAAレーダーは、地図の図1に示すように、湾の南端にあります。





この特定のレーダーは2.875GHzで送信します。 2〜4 GHzの導波管アンテナを約50kmの距離にある三脚に取り付けると、レーダーパルスを簡単に検出できます(図3)。
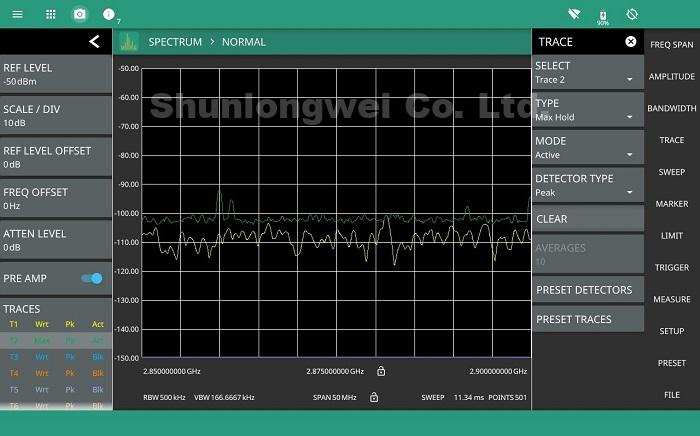
レーダーアンテナの回転により、図5に示すように、パルスは約4秒ごとに受信アナライザーにのみ向けられます。

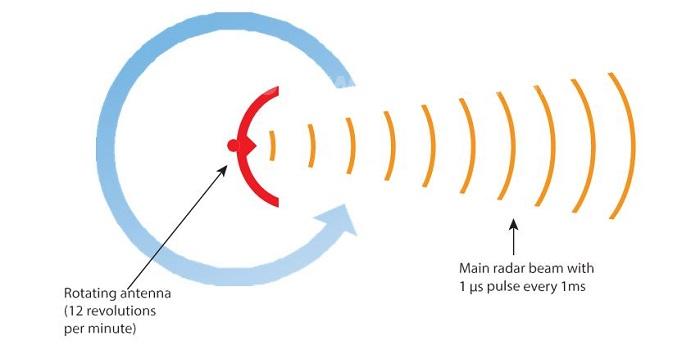
図5は、パルスの持続時間が短く、送信アンテナが回転しているため、周波数掃引モードのスペクトラムアナライザは、トレースの最大ホールドが適用されていても信号をキャプチャしないことを示しています。

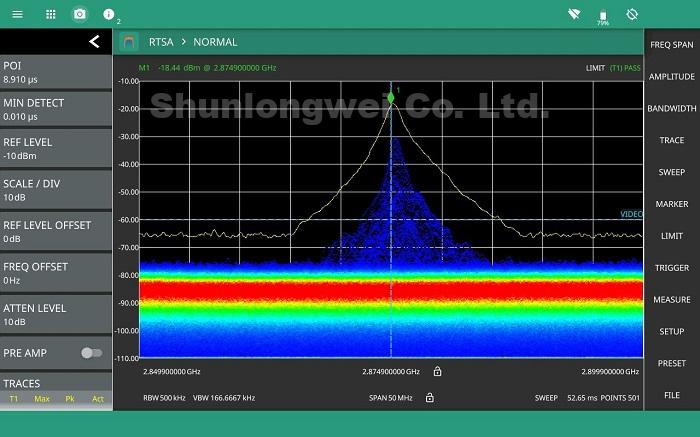
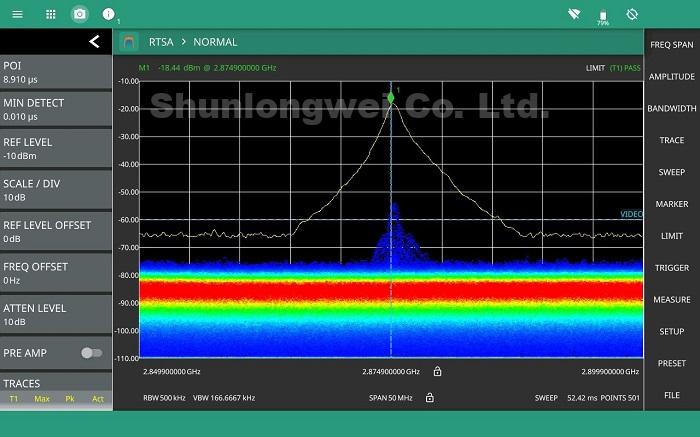
アナライザーモードを切り替えてRTSAで信号を表示することにより、レーダー信号が常にキャプチャされていることがわかります(図6)。 RTSAは、回転アンテナがField Master Pro MS2090Aに接続された導波管ホーンアンテナを指し、それから離れる方向に回転すると、上昇および下降するように見えるレーダーパルスパワーを継続的に表示します。 これには、「呼吸」しているように見えるパワースペクトル密度を表示する効果があります。 最大ホールドトレースを使用すると、最大状態に対する現在の信号レベルを適切に示すことができます(図7)。

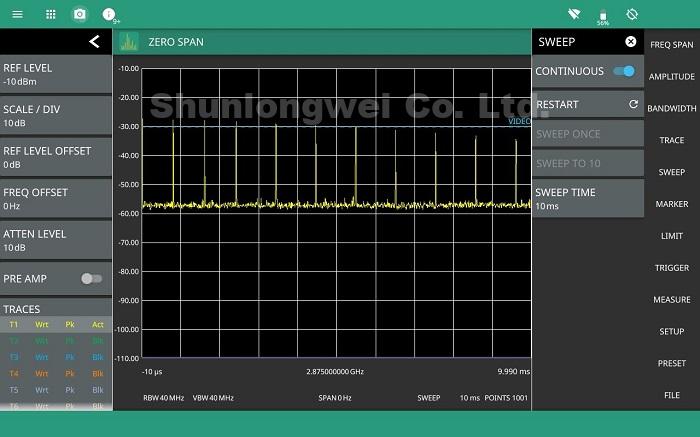
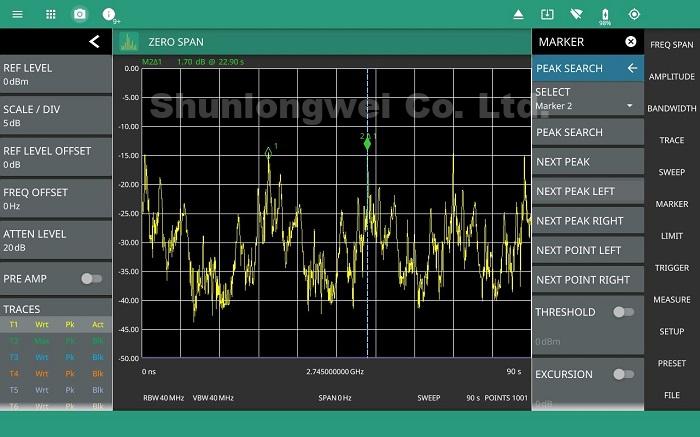
時間領域でパルスを表示するために、スペクトラムアナライザはゼロスパンモードになります。 これにより、アナライザ入力の周波数が固定され、時間に対する電力がディスプレイに表示されます。 最初は、レーダー送信機のパルスが見えるように長い期間を設定することは興味深いことです。 図8は、レーダー送信機が回転するときに、公称5秒のデューティサイクルで表示されるパルスのグループを示しています。 この場合、RFエネルギーの各バーストには、多数の個別の1 µsパルスが含まれています。

パルスの測定は、トレース上にマーカーを配置することでゼロスパンモードで行うことができますが、これには、オプション0421パルスアナライザによって提供される精度または測定のトレーサビリティがありません。
パルスアナライザオプションを有効にすると、IEEE標準に完全に準拠したパルスとパルスストリームの測定が可能になります。 パルス繰り返し周波数、デューティサイクル、およびオフ時間を測定するには、少なくとも11つのパルスをキャプチャして表示する必要があります。通常は、さらにキャプチャすることをお勧めします(図XNUMX)。 パルス列や個々のパルス特性によっては、立ち上がり時間などのすべての測定を同じスパンで実行できない場合があります。

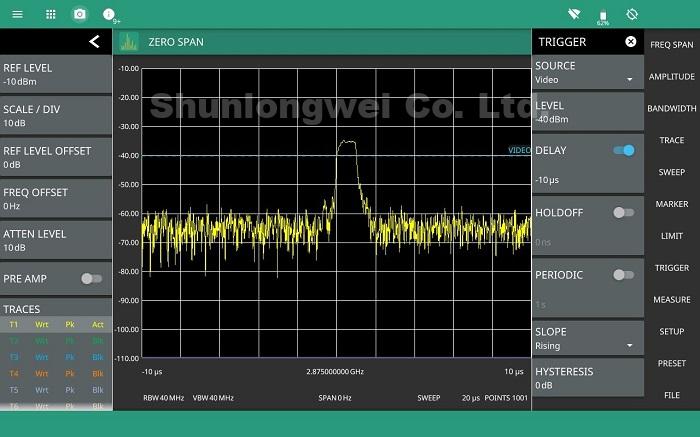
ビデオトリガーレベルとプリトリガー遅延を設定して、機器のディスプレイに安定したパルスストリームを表示します。 パルスアナライザオプションは、キャプチャされたデータに対して実行できるすべての測定値を自動的に入力します。追加の設定は必要ありません。
掃引時間を短くして、単一のパルスを表示します。 垂直マーカーラインは、立ち上がりエッジと立ち下がりエッジの10%と90%の線形パワーポイント、およびパルス持続時間を測定するために使用される50%の参照レベルの水平マーカーに自動的に配置されます。 IEEEのデフォルト値は、必要に応じて手動で上書きできます。 (IEEE測定の詳細は付録に記載されています。)

図13は、フルスクリーンビューモードが単一パルスのより詳細なビューに使用できることを示しています。

Field Master Pro MS2090Aパルスアナライザオプションを使用すると、空港監視レーダーのフィールド測定を、操作を中断することなく正確かつ迅速に完了することができます。
気象レーダー
レーダーのもう150つの一般的な用途は、降雨、暴風雨、雪などの気象条件を監視することです。 気象レーダーは、降雨や暴風雨を積極的に追跡するために地上ベースにすることも、広域監視のために衛星ベースにすることもできます。 米国では、1990を超える地上ベースの気象レーダーのネットワークが国立気象センターによって運営されています。 次世代気象レーダー(NEXRAD)システムとして知られる最初のレーダーは、XNUMX年代に配備および運用され、システムは継続的に強化されています。
| WSR-88D 国立気象レーダー | |
| 元請業者 | ユニシス |
| 周波数 | 2.7〜3.0 GHz |
| レンジ | 90〜150マイル(〜145〜240 km) |
| 最大電力 | 700 kW |
| パルス幅 | 〜1 µs〜5 µs |
| パルス繰り返し周波数 | 〜1ミリ秒 |
| 回転速度 | 3 RPM |
気象レーダーの特性は、空港の監視レーダーに似ています。 どちらも同じ周波数帯域と高出力パルスを使用します。 周波数計画は、テクノロジー間に干渉がないことを確認するために重要です。 サンフランシスコベイエリアをカバーする気象レーダーは、サンノゼの南約20マイルのユマンハム山にあります。

ユマンハム山の気象レーダーは2.745GHzで送信し、アンテナは3分間に約15回回転します(図XNUMX)。 パルス列は、その時の状態によって異なります。 濃い雨はより多くの力を反映し、範囲を狭めます。
このレーダー用に設定されたテストは、空港監視レーダーについて前述したものと同様です。 Field Master Pro MS2090Aに接続され、レーダーの方向に向けられた導波管ホーンアンテナにより、レーダーの位置から何マイルも離れた場所で測定を行うことができます。
ゼロスパンモードでパルス列を分析すると、大気条件の変化を分析するためにさまざまなモードでレーダーが使用するパルス繰り返し周波数の変化が浮き彫りになります。 図16は、XNUMXつの別々にキャプチャされたビューの違いを示しています

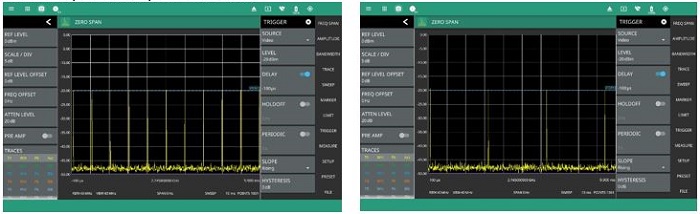
パルスアナライザオプションは、図17に示すように、パルス列と個々のパルス特性の迅速で詳細な分析を提供します。

まとめ
Field Master Pro MS2090Aパルスアナライザオプションは、フィールドでパルスレーダー信号を測定するための強力なテストソリューションを提供します。 広い測定帯域幅は、30nsの高速立ち上がり時間測定をサポートします。 IEEE準拠のパルス測定と組み合わせることで、メンテナンスまたはトラブルシューティングアプリケーション用のレーダーの定期的なテストが、以前はラボに限定されていた方法で可能になり、現場で実行できます。
付録:サポートされているパルス測定の概要
脈拍測定
ヒストグラムアルゴリズムを使用した高/低参照レベルの検索
パルスレベルタイプがAUTOに設定されている場合、ヒストグラムアルゴリズムメソッドを使用して、IEEE Standard for Pulses、Transitions、and Related Waveforms(181-2011)のセクション5.2.1で説明されているように、高状態レベルと低状態レベルを決定します。 トレースデータが入力として取得され、振幅はdBm単位で操作されます。 トレースデータはヒストグラムに変換され、ビンの数は、トレースデータの値の全範囲(トレース最大からトレース最小)全体で0.01の固定ビン幅によって決定されます。 言い換えると、各トレースポイントの振幅は、その振幅が含まれる振幅範囲に対応するヒストグラムビンの「カウント」を増加させます。 高状態レベルと低状態レベルを見つけるために、結果のヒストグラムは「上部」と「下部」のヒストグラムに分割されます。前者は振幅の上位50%の範囲に対応するすべてのビンで構成され、後者は下位50%の範囲に対応します。範囲。 次に、高状態が上位ヒストグラムのモード、つまり、カウントが最も高いヒストグラムビンに対応する振幅であると判断されます。 同様に、低状態が下のヒストグラムのモードであると判断されます。
いずれかのモードのカウントがトレースデータ入力のポイントの総数の少なくとも1%以下の場合、ヒストグラムは1倍のビン幅を使用して再作成されます。 ビン幅を大きくしてヒストグラムを再生成するこのプロセスは、ヒストグラムのモードがポイントの総数の少なくとも0.01%になるまで繰り返されます。 これは、結果として得られる高状態と低状態の最良の解像度が0.1 dBm(開始ビン幅)であることを意味し、状態レベルの変動の程度に応じて、解像度は1 dBm、XNUMXdBmなどにフォールバックできます。 。


パルスレベルタイプがUSERに設定されている場合、ユーザーは高状態レベルと低状態レベルを決定し、USER TOP(S2)およびUSER BOTTOM(S1)設定を使用してレベルを入力します。
参照レベルのインスタントを見つける
インスタントは、波形の持続時間内の特定の時間値です。 これらは通常、波形の最初の瞬間を基準にして参照されます。 次のセクションでは、パルス測定値の決定方法について説明します
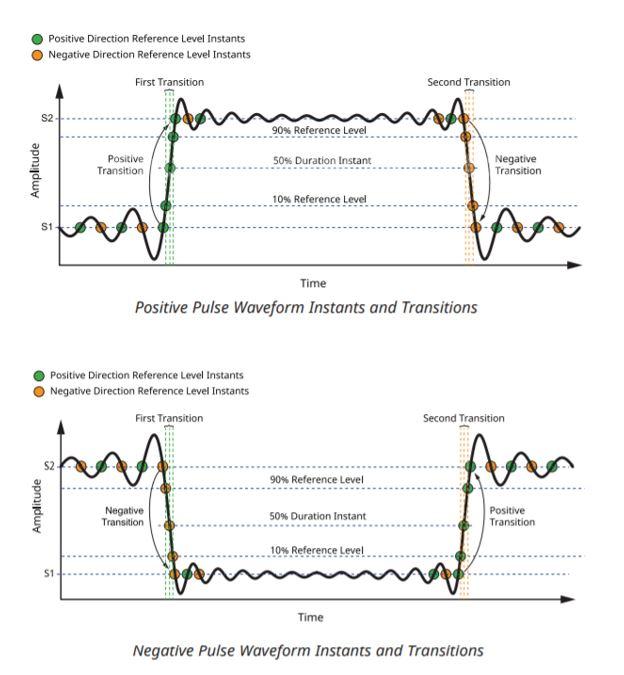

トランジションを見つける
遷移は、波形の連続した領域であり、直接または介在するトランジェントを介して、時間的に連続しているが異なる状態の発生であるXNUMXつの状態の発生を接続します。 遷移を見つけるには、低または高の参照レベルを超えるもののみを含む参照レベルのインスタントのフィルターされたリストから始めます。 リスト内の各参照レベルの瞬間には、対応するインデックスと方向があります(たとえば、振幅が参照レベルと交差する直前のトレースインデックス、およびトレースが参照レベルの上から下、またはその逆に交差するかどうかを示す方向)。
このフィルタリングされたインスタントのリストは、インデックスの昇順で並べ替えられます。 次に、すべての正と負の遷移(高/低参照レベル間)は、両方が同じ方向を持つフィルター処理されたリスト内の連続する瞬間を検索することによって検出されます。 波形は、90%の基準レベルを超えると「高状態」になり、10%の基準レベルを下回ると「低状態」になると定義されます。 これは、状態の上限/下限を使用するのではなく、選択された代替手段です(IEEE標準ではオプションであるとされています)。
パルスの持続時間と周期を見つける
パルス幅は、上記のように正と負の遷移を使用して、有効なパルスであるかどうかを確認することによって決定されます。 その場合、パルス幅の基準レベル(50%)が正/負の遷移内に存在することが確認されます。 この基準レベルは、パルスの開始期間と終了期間を決定します。 期間は、終了点と開始点の差です。 パルス周期はまた、最初に正と負の遷移からの有効なパルスがあることを決定します。 パルス持続時間の測定とは異なり、測定を行うには、パルス周期にパルスリピートまたはパルス列が必要です。 有効な測定値を生成するには、3%の参照レベルに少なくとも50つの遷移が必要です。 周期は、最初のパルスの開始レベルとXNUMX番目のパルスの開始レベルの間の距離です。
波の平均を見つける
波の平均は、トレースで利用可能なすべての完全な期間内のすべてのポイントの電力レベルを平均することによって決定されます。 開始および停止する場所を決定するために、遷移の数を使用して、少なくともXNUMXつの完全な期間があるかどうかを決定します。 全期間がない場合、システムは「nan」を返します。 それ以外の場合、この測定の開始点は最初の遷移の開始点であり、終了点は最後の全期間の遷移の開始点です。
たとえば、XNUMXつの遷移があるトレースには、最初の遷移の前にある程度のポイントがあり、その後にXNUMXつの完全な期間が続き、その後にXNUMXつ未満の完全な期間が続きます。 すべての完全な期間の開始と終了が見つかると、それらの間のすべてのポイントが合計され、測定に使用されたポイントの総数で除算されます。
トレース平均の検索
トレース平均は、トレース内のすべてのポイントの指数平均です。 波の平均とは異なり、フルパルスに制限されません。
パルス平均を見つける
パルス平均は、パルスの高状態にあるポイントの平均です(通常、90%の基準線より上のポイント)。 これは正のパルスにのみ適用されます。 正のパルスがない場合、測定値は返されません。
パルス中心の瞬時周波数と繰り返し周波数を見つける
パルス繰り返し周波数は、周波数値としてパルス周期(1 /パルス周期)の逆数から決定されます。 パルス中心の瞬間は、パルス持続時間(50%)の開始時間を取得し、パルス持続時間の半分(パルス持続時間/ 2)であるパルス持続時間の中点を追加することによって決定されます。
パルスピークを見つける
パルスピークは、正の遷移後の波形の最大値です。 正の遷移がない場合は、波形全体のピーク振幅が返されます。
パルスチルトを見つける
パルスチルトは、状態の全体的な傾きが本質的に一定でゼロ以外の波形状態の歪みを測定します。 傾きはどちらの極性でもかまいません。負または正のパルスに対して計算されます。 傾きを測定できる波形状態を確保するには、完全なパルス(少なくとも25つの遷移を含む)が必要です。 波形状態内に十分なトレースデータがある場合、オーバーシュート歪みが発生する可能性が最も高いサンプルの最初と最後の50%が削除されます。 次に、状態トレースデータの残りのXNUMX%の勾配が最小二乗法を使用して計算され、傾きは、勾配に状態内のトレースポイントの数を掛けることによって計算されます。
波の振幅を見つける
波の振幅は、dB単位の上位状態レベルの振幅から下位状態レベルの振幅を差し引くことによって求められます。
ピークから波への平均を見つける
波の平均に対するピークは、dBの観点からパルスのピークから波の平均を差し引くことによって求められます。 これには、波の平均が有効な値である必要があるため、 測定.
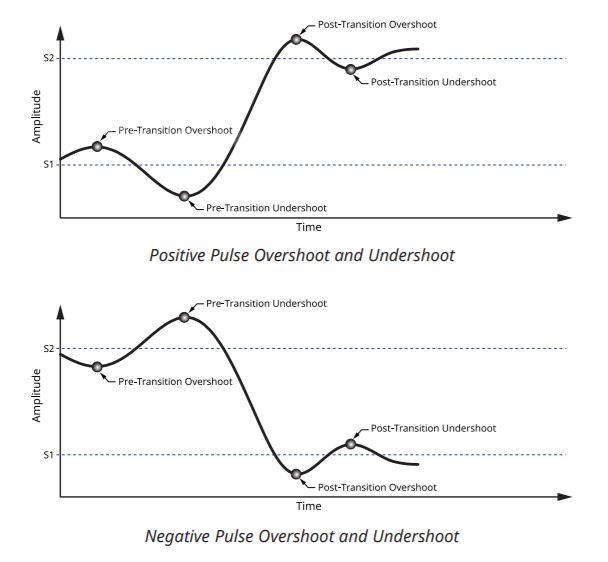
移行前および移行後の異常領域の検索
遷移前収差領域は、最初の遷移の前に最後の状態が交差する前のトレースの領域であり、幅は最初の遷移の持続時間のXNUMX倍に等しいと決定されます。 これは、遷移前の使用可能なトレースデータによって上限が設定されます。 遷移後収差領域は、最初の遷移を通過した最初の状態で始まり、遷移期間のXNUMX倍または次の遷移の開始のいずれか早い方で終了する領域です。
移行前および移行後の異常領域の検索
遷移前収差領域は、最初の遷移の前に最後の状態が交差する前のトレースの領域であり、幅は最初の遷移の持続時間のXNUMX倍に等しいと決定されます。 これは、遷移前の使用可能なトレースデータによって上限が設定されます。 遷移後収差領域は、最初の遷移を通過した最初の状態で始まり、遷移期間のXNUMX倍または次の遷移の開始のいずれか早い方で終了する領域です。


各異常領域のオーバーシュートとアンダーシュートを見つける
各領域のオーバーシュートとアンダーシュートは、各収差領域の最大および最小トレース値と局所状態レベルの差をとることによって計算されます。 ローカル状態レベルは、正の遷移では(Low =遷移前→遷移後)であり、負の遷移では(High =遷移前→Low =遷移後)です。