บทนำ
การใช้พัลส์ RF เพื่อตรวจจับวัตถุในสามมิติเริ่มขึ้นในช่วงต้นทศวรรษ 1900 การใช้งานเบื้องต้นมุ่งเน้นไปที่ข้อกำหนดทางทหาร โดยเฉพาะการตรวจจับเรือและเครื่องบิน ทุกวันนี้ เรดาร์ถูกใช้ในแอพพลิเคชั่นทางการทหาร เชิงพาณิชย์ และการวิจัย ซึ่งรวมถึงการติดตามเครื่องบิน การเฝ้าติดตามสภาพอากาศ และการตรวจจับความเร็วของสิ่งใดๆ ตั้งแต่ลูกเทนนิสไปจนถึงรถยนต์ หลักการพื้นฐานของเรดาร์ยังคงไม่เปลี่ยนแปลง โดยมีการส่งพลังงาน RF ออกสั้นๆ จากนั้นเครื่องรับจะรอตรวจจับพลังงานใดๆ ที่กระเด้งกลับจากวัตถุที่อยู่ห่างไกล
เมื่อติดตั้งแล้ว คาดว่าเรดาร์จำนวนมากจะทำงานได้อย่างต่อเนื่องเป็นเวลาหลายทศวรรษ เพื่อให้แน่ใจว่าประสิทธิภาพจะไม่ลดลงเมื่อเวลาผ่านไป จำเป็นต้องวัดตัวชี้วัดประสิทธิภาพหลักเป็นระยะอย่างสม่ำเสมอ หนึ่งในจุดสำคัญของประสิทธิภาพที่ได้รับการตรวจสอบคือลักษณะของพัลส์ RF ที่ส่ง IEEE ได้เผยแพร่ข้อกำหนดสำหรับวิธีการวัดพารามิเตอร์ที่สำคัญของพัลส์ "IEEE Std 181-2011, Standard for Transitions, Pulses และรูปคลื่นที่เกี่ยวข้อง" มาตรฐานนี้ระบุอย่างแม่นยำว่าพารามิเตอร์ใดที่ต้องวัดและวิธีคำนวณการวัดเหล่านั้น
Field Master Pro MS2090A พร้อมตัวเลือก 0421 ตัววิเคราะห์พัลส์จะแสดงลักษณะพัลส์แบบเต็มและให้ผลลัพธ์ที่เป็นตัวเลขโดยละเอียดสำหรับพารามิเตอร์เรดาร์ทั่วไปทั้งหมด บันทึกการใช้งานนี้เน้นการใช้งานในการวัดภาคสนามของเรดาร์ตรวจการณ์สนามบินและเรดาร์ตรวจอากาศ
เรดาร์ตรวจการณ์สนามบิน
ในปี 1998 สำนักงานบริหารการบินแห่งสหพันธรัฐแห่งสหรัฐอเมริกา (FAA) ได้เปิดตัวเรดาร์ตรวจการณ์สนามบินแบบใหม่ที่เรียกว่า ASR-11 ซึ่งติดตามการเคลื่อนไหวของเครื่องบินและให้ข้อมูลสภาพอากาศเพิ่มเติม ขณะนี้มีเรดาร์เหล่านี้มากกว่า 400 ที่ติดตั้งทั่วสหรัฐอเมริกา
| เรดาร์ตรวจการณ์สนามบิน ASR-11 | |
| ผู้ผลิต | เรย์ ธ |
| เวลา | 2.7 ถึง 2.9 GHz |
| พิสัย | 60 ไมล์ (~97 km) |
| พลังสูงสุด | 25 กิโลวัตต์ |
| กว้างพัลส์ | 1 µs ถึง 80 µs |
| ความถี่ในการทำซ้ำของพัลส์ | ~ 1 ms |
| อัตราการหมุน | รอบต่อนาที 12.5 |
กำลังสูงสุดที่สูงจากเรดาร์เหล่านี้ทำให้ง่ายต่อการตรวจจับระยะทางจากตำแหน่งของพวกเขา ตัวอย่างเช่น เรดาร์ของ FAA ที่ครอบคลุมบริเวณอ่าวซาน ฟรานซิสโก ตั้งอยู่ทางใต้สุดของอ่าวดังที่แสดงในแผนที่ รูปที่ 1

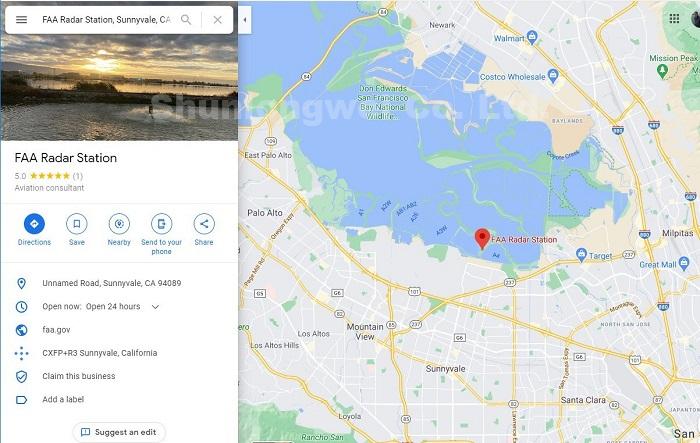




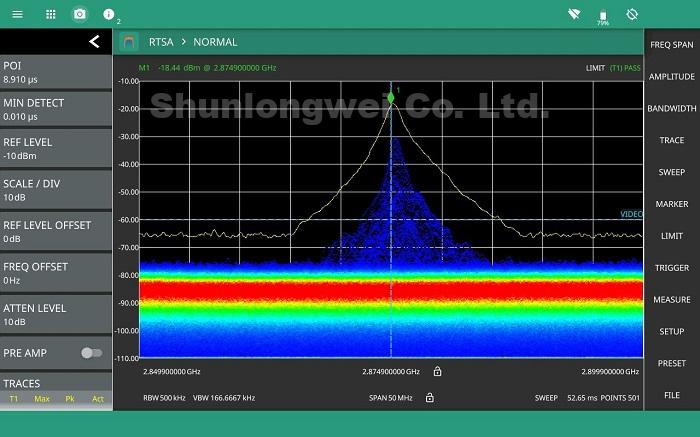
เรดาร์เฉพาะนี้ส่งสัญญาณที่ 2.875 GHz เมื่อติดตั้งเสาอากาศท่อนำคลื่นความถี่ 2 ถึง 4 GHz บนขาตั้งกล้องที่ระยะประมาณ 50 กิโลเมตร พัลส์เรดาร์จะตรวจจับได้ง่าย (รูปที่ 3)
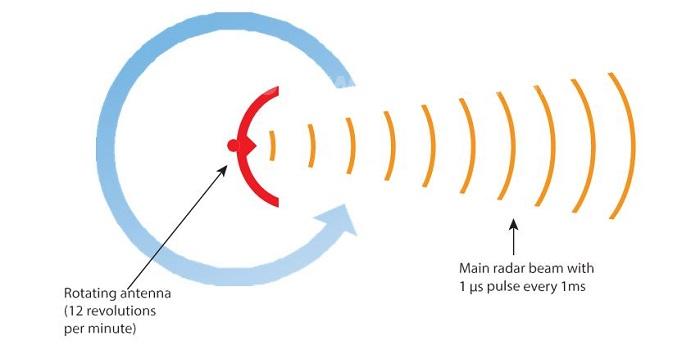
เนื่องจากการหมุนของเสาอากาศเรดาร์ พัลส์จะถูกส่งไปยังเครื่องวิเคราะห์การรับประมาณทุก ๆ 5 วินาทีดังที่แสดงในรูปที่ 4 เท่านั้น

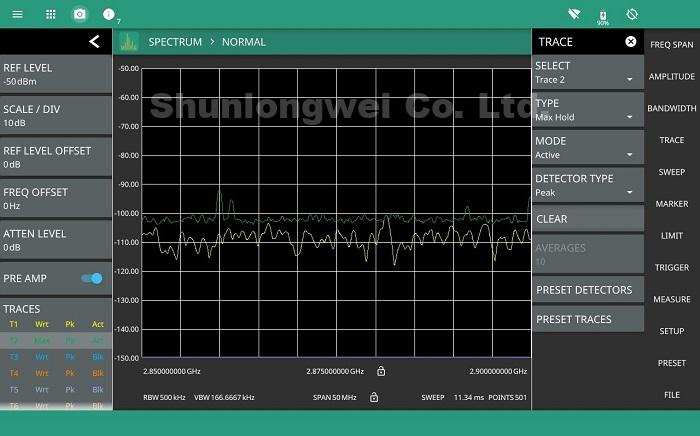
รูปที่ 5 แสดงให้เห็นว่าเนื่องจากระยะเวลาสั้น ๆ ของพัลส์และการหมุนของเสาอากาศส่งสัญญาณ เครื่องวิเคราะห์สเปกตรัมในโหมดกวาดความถี่จะไม่จับสัญญาณ แม้ว่าจะมีการคงค่าสูงสุดของการติดตามก็ตาม

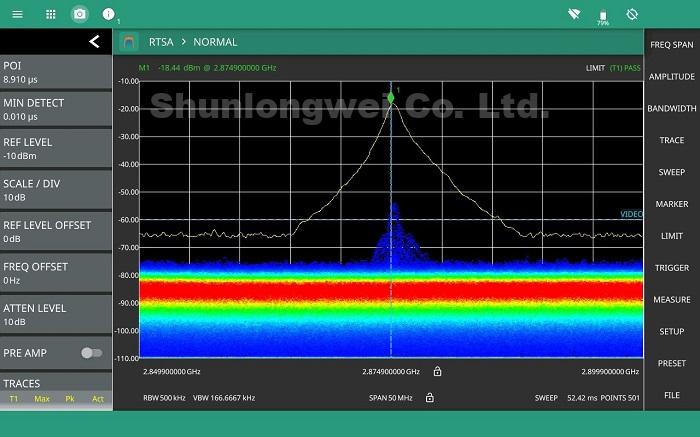
โดยการเปลี่ยนโหมดเครื่องวิเคราะห์เพื่อดูสัญญาณด้วย RTSA จะสามารถเห็นสัญญาณเรดาร์ที่ถูกจับได้เสมอ (รูปที่ 6) RTSA จะแสดงกำลังพัลส์เรดาร์อย่างต่อเนื่องซึ่งดูเหมือนว่าจะขึ้นและลงเมื่อเสาอากาศหมุนชี้ไปที่เสาอากาศแตรท่อนำคลื่นที่เชื่อมต่อกับ Field Master Pro MS2090A แล้วหมุนออกจากเสาอากาศ สิ่งนี้มีผลในการแสดงความหนาแน่นของสเปกตรัมพลังงานที่ดูเหมือนจะ "หายใจ" การใช้การติดตามการคงไว้สูงสุดเป็นการบ่งชี้ที่ดีของระดับสัญญาณปัจจุบันที่สัมพันธ์กับสภาวะสูงสุด (รูปที่ 7)

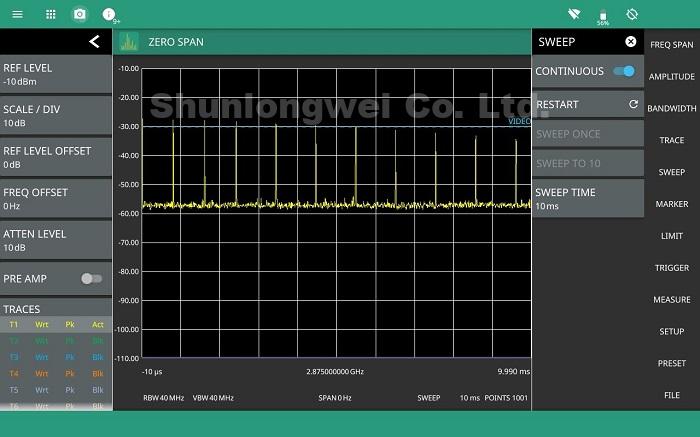
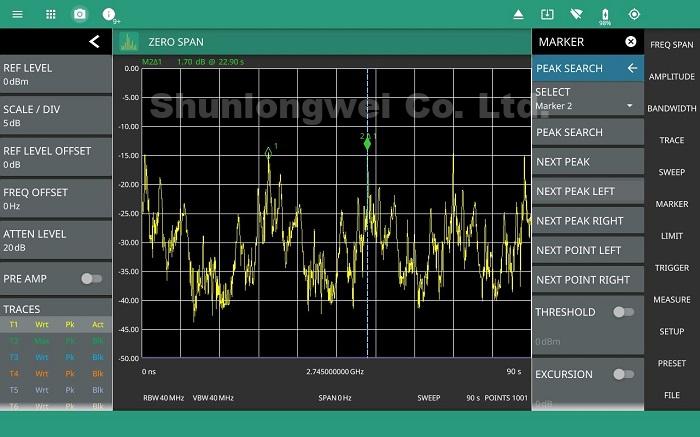
ในการดูพัลส์ในโดเมนเวลา ตัววิเคราะห์สเปกตรัมจะเข้าสู่โหมดช่วงศูนย์ วิธีนี้จะแก้ไขความถี่ของอินพุตของตัววิเคราะห์และแสดงพลังงานเทียบกับเวลาบนจอแสดงผล เริ่มแรก เป็นเรื่องที่น่าสนใจที่จะตั้งช่วงเวลาที่ยาวขึ้นเพื่อให้มองเห็นพัลส์ของเครื่องส่งสัญญาณเรดาร์ได้ รูปที่ 8 แสดงกลุ่มของพัลส์ที่แสดงด้วยรอบการทำงาน 5 วินาทีในนามขณะที่เครื่องส่งเรดาร์หมุน ในกรณีนี้ การระเบิดของพลังงาน RF แต่ละครั้งจะมีพัลส์ 1 µs จำนวนมาก

แม้ว่าการวัดบนพัลส์สามารถทำได้ในโหมด Zero span โดยการวางตำแหน่งเครื่องหมายบนการติดตาม แต่สิ่งนี้ไม่มีความแม่นยำหรือความสามารถในการตรวจสอบย้อนกลับของการวัดที่มีให้โดยตัวเลือก 0421 เครื่องวิเคราะห์พัลส์
การเปิดใช้งานตัวเลือกเครื่องวิเคราะห์พัลส์ช่วยให้สามารถตรวจวัดพัลส์และกระแสพัลส์ได้ตามมาตรฐาน IEEE สำหรับการวัดความถี่การทำซ้ำของพัลส์ รอบการทำงาน และเวลาปิด ต้องมีการบันทึกและแสดงพัลส์อย่างน้อยสองพัลส์ โดยทั่วไปแล้วจะเป็นการดีกว่าหากจับได้มากกว่า (รูปที่ 11) ขึ้นอยู่กับขบวนการพัลส์และลักษณะพัลส์แต่ละตัว อาจไม่สามารถทำการวัดทั้งหมดได้ เช่น เวลาที่เพิ่มขึ้นในช่วงเดียวกัน

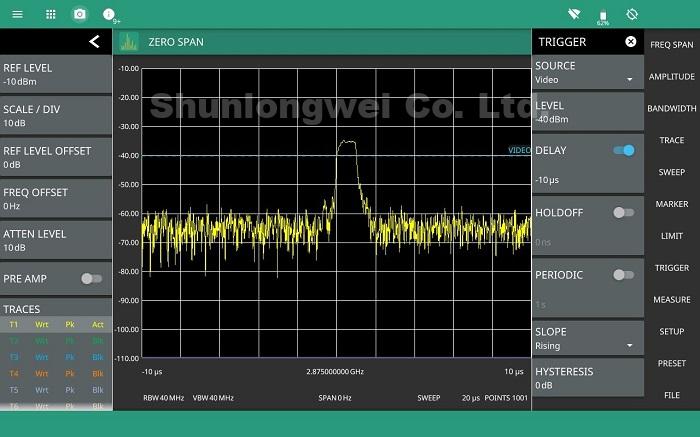
ตั้งค่าระดับทริกเกอร์วิดีโอและหน่วงเวลาทริกเกอร์ล่วงหน้าเพื่อแสดงกระแสพัลส์ที่เสถียรบนจอแสดงผลของอุปกรณ์ ตัวเลือกเครื่องวิเคราะห์พัลส์จะเติมข้อมูลการวัดทั้งหมดที่สามารถทำได้กับข้อมูลที่บันทึกไว้โดยอัตโนมัติ ไม่จำเป็นต้องตั้งค่าเพิ่มเติม
ลดเวลาในการกวาดเพื่อแสดงพัลส์เดียว เส้นมาร์กเกอร์แนวตั้งจะถูกวางโดยอัตโนมัติบนจุดกำลังเชิงเส้น 10% และ 90% สำหรับขอบที่เพิ่มขึ้นและลดลง เช่นเดียวกับเครื่องหมายแนวนอนสำหรับระดับอ้างอิง 50% ที่ใช้ในการวัดระยะเวลาพัลส์ ค่าดีฟอลต์ของ IEEE สามารถแทนที่ได้ด้วยตนเองหากจำเป็น (รายละเอียดการวัดค่า IEEE อยู่ในภาคผนวก)

รูปที่ 13 แสดงโหมดการดูแบบเต็มหน้าจอสำหรับมุมมองที่ละเอียดยิ่งขึ้นของพัลส์เดี่ยว

ด้วยตัวเลือกเครื่องวิเคราะห์พัลส์ Field Master Pro MS2090A การวัดภาคสนามของเรดาร์ตรวจการณ์สนามบินสามารถทำได้อย่างถูกต้องและรวดเร็วโดยไม่ขัดจังหวะการทำงาน
เรดาร์สภาพอากาศ
การใช้เรดาร์ทั่วไปอีกประการหนึ่งคือการเฝ้าติดตามสภาพอากาศ รวมทั้งปริมาณน้ำฝน พายุ และหิมะ เรดาร์ตรวจสภาพอากาศสามารถใช้ภาคพื้นดินเพื่อติดตามปริมาณน้ำฝนและพายุ หรือดาวเทียมตามการตรวจสอบพื้นที่ที่กว้างขึ้น ในสหรัฐอเมริกา เครือข่ายเรดาร์ตรวจอากาศภาคพื้นดินกว่า 150 ตัวดำเนินการโดยศูนย์พยากรณ์อากาศแห่งชาติ ระบบเรดาร์ตรวจอากาศรุ่นต่อไป (NEXRAD) เป็นที่รู้จักในชื่อระบบเรดาร์ตรวจอากาศรุ่นต่อไป (NEXRAD) เรดาร์ชุดแรกได้รับการติดตั้งและใช้งานในปี 1990 และระบบกำลังได้รับการปรับปรุงอย่างต่อเนื่อง
| เรดาร์ตรวจอากาศแห่งชาติ WSR-88D | |
| ผู้รับเหมาหลัก | Unisys |
| เวลา | 2.7 ถึง 3.0 GHz |
| พิสัย | 90 ถึง 150 ไมล์ (~145 ถึง 240 กม.) |
| พลังสูงสุด | 700 กิโลวัตต์ |
| กว้างพัลส์ | ~ 1 µs ถึง 5 µs |
| ความถี่ในการทำซ้ำของพัลส์ | ~ 1 ms |
| อัตราการหมุน | รอบต่อนาที 3 |
ลักษณะเรดาร์ตรวจอากาศจะคล้ายกับเรดาร์ตรวจการณ์สนามบิน ทั้งสองใช้คลื่นความถี่เดียวกันและพัลส์กำลังสูง การวางแผนความถี่มีความสำคัญเพื่อให้แน่ใจว่าไม่มีการรบกวนระหว่างเทคโนโลยี เรดาร์ตรวจอากาศที่ครอบคลุมบริเวณอ่าวซานฟรานซิสโก ตั้งอยู่บนภูเขาอูมุนฮุม ประมาณ 20 ไมล์ทางใต้ของซานโฮเซ

เรดาร์ตรวจอากาศ Mount Umunhum ส่งที่ 2.745 GHz และเสาอากาศหมุนประมาณ 3 ครั้งต่อนาที (รูปที่ 15) รถไฟพัลส์จะแตกต่างกันไปตามเงื่อนไขในขณะนั้น ฝนที่ตกหนักจะสะท้อนพลังมากขึ้นและลดระยะ
การทดสอบที่ตั้งขึ้นสำหรับเรดาร์นี้คล้ายกับที่ได้อธิบายไว้ก่อนหน้านี้สำหรับเรดาร์ตรวจการณ์สนามบิน เสาอากาศแตรท่อนำคลื่นที่เชื่อมต่อกับ Field Master Pro MS2090A และชี้ไปในทิศทางของเรดาร์ทำให้สามารถวัดได้หลายไมล์จากตำแหน่งเรดาร์
การวิเคราะห์พัลส์เทรนในโหมด Zero span จะเน้นถึงการเปลี่ยนแปลงความถี่ในการทำซ้ำของพัลส์ที่เรดาร์ใช้ในโหมดต่างๆ เพื่อวิเคราะห์การเปลี่ยนแปลงในสภาวะบรรยากาศ รูปที่ 16 แสดงความแตกต่างในสองมุมมองที่แยกจากกัน

ตัวเลือกเครื่องวิเคราะห์พัลส์อีกครั้งให้การวิเคราะห์โดยละเอียดอย่างรวดเร็วของพัลส์เทรนและลักษณะพัลส์แต่ละอย่าง ซึ่งสามารถเห็นได้ใน รูปที่ 17

สรุป
ตัวเลือกเครื่องวิเคราะห์พัลส์ Field Master Pro MS2090A มอบโซลูชันการทดสอบอันทรงพลังสำหรับการวัดสัญญาณเรดาร์พัลซิ่งในภาคสนาม แบนด์วิดท์การวัดที่กว้างรองรับการวัดเวลาที่เพิ่มขึ้นได้เร็วถึง 30 ns ร่วมกับการวัดชีพจรที่สอดคล้องกับ IEEE การทดสอบเรดาร์เป็นประจำสำหรับการบำรุงรักษาหรือแอปพลิเคชันการแก้ไขปัญหาเป็นไปได้ในลักษณะที่ก่อนหน้านี้ถูกจำกัดให้อยู่ในห้องปฏิบัติการและสามารถทำได้ในภาคสนาม
ภาคผนวก: สรุปการวัดชีพจรที่รองรับ
การวัดชีพจร
การหาระดับอ้างอิงสูง/ต่ำโดยใช้อัลกอริธึมฮิสโตแกรม
เมื่อตั้งค่าประเภทระดับพัลส์เป็น AUTO วิธีอัลกอริธึมฮิสโตแกรมจะใช้สำหรับกำหนดระดับสถานะสูงและต่ำตามที่อธิบายไว้ในมาตรฐาน IEEE สำหรับพัลส์ ทรานซิชัน และรูปคลื่นที่เกี่ยวข้อง (181-2011) ส่วน 5.2.1 ข้อมูลการติดตามจะถูกนำมาเป็นอินพุตและแอมพลิจูดจะดำเนินการในแง่ของหน่วย dBm ข้อมูลการติดตามจะถูกแปลงเป็นฮิสโตแกรมโดยที่จำนวนถังขยะจะถูกกำหนดโดยความกว้างของถังขยะคงที่ 0.01 ตลอดช่วงค่าทั้งหมดในข้อมูลการติดตาม (trace max to trace min) กล่าวอีกนัยหนึ่ง แอมพลิจูดของจุดติดตามแต่ละอันส่งผลให้ "จำนวน" เพิ่มขึ้นในถังฮิสโตแกรมที่สอดคล้องกับช่วงแอมพลิจูดที่แอมพลิจูดนั้นตกลงมา ในการค้นหาระดับสถานะสูงและต่ำ ฮิสโตแกรมที่ได้จะถูกแบ่งออกเป็นฮิสโตแกรม "บน" และ "ล่าง" โดยที่ค่าเดิมประกอบด้วยถังขยะทั้งหมดที่สอดคล้องกับช่วงแอมพลิจูด 50% ด้านบน และส่วนหลังจะมีค่า 50% ที่ต่ำกว่า พิสัย. จากนั้นสถานะสูงจะถูกกำหนดให้เป็นโหมดของฮิสโตแกรมด้านบน นั่นคือแอมพลิจูดที่สอดคล้องกับถังฮิสโตแกรมที่มีการนับสูงสุด สถานะต่ำถูกกำหนดในทำนองเดียวกันให้เป็นโหมดของฮิสโตแกรมที่ต่ำกว่า
หากจำนวนของโหมดใดโหมดหนึ่งไม่เกิน 1% ของจำนวนจุดทั้งหมดในการป้อนข้อมูลการติดตาม ฮิสโตแกรมจะถูกสร้างขึ้นใหม่โดยใช้ความกว้างของถังขยะที่ใหญ่กว่าสิบเท่า กระบวนการสร้างฮิสโตแกรมขึ้นใหม่ด้วยความกว้างของถังขยะที่ใหญ่ขึ้นจะทำซ้ำจนกว่าโหมดของฮิสโตแกรมจะมีอย่างน้อย 1% ของจำนวนจุดทั้งหมด ซึ่งหมายความว่าความละเอียดเคสที่ดีที่สุดของสถานะสูงและสถานะต่ำที่ได้คือ 0.01 dBm (ความกว้างของถังขยะเริ่มต้น) และขึ้นอยู่กับระดับสถานะที่ผันผวน ความละเอียดอาจถอยกลับไปเป็น 0.1 dBm, 1 dBm เป็นต้น .


เมื่อตั้งค่าประเภทระดับพัลส์เป็น USER ผู้ใช้จะกำหนดระดับสถานะสูงและต่ำ และเข้าสู่ระดับโดยใช้การตั้งค่า USER TOP (S2) และ USER BOTTOM (S1)
ค้นหาระดับอ้างอิงทันที Instant
ค่าทันทีคือค่าเวลาเฉพาะภายในระยะเวลาของรูปคลื่น โดยทั่วไปจะมีการอ้างอิงสัมพันธ์กับช่วงเวลาเริ่มต้นของรูปคลื่น ส่วนต่อไปนี้จะอธิบายวิธีการกำหนดการวัดพัลส์

หาช่วงเปลี่ยนผ่าน
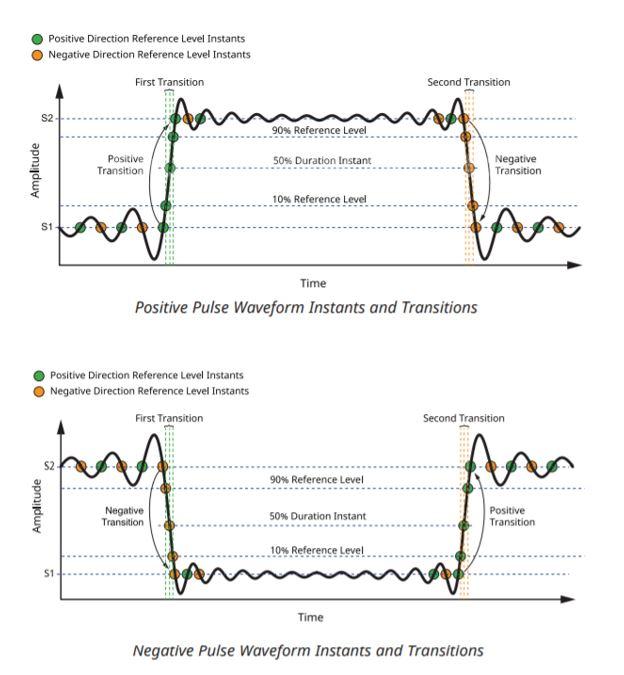
ทรานซิชันคือบริเวณที่ต่อเนื่องกันของรูปคลื่นที่เชื่อมต่อโดยตรงหรือโดยผ่านทรานเซียนท์ที่แทรกแซง เหตุการณ์สองสถานะที่เกิดขึ้นต่อเนื่องกันในเวลาแต่เป็นการเกิดขึ้นของสถานะต่างกัน หากต้องการค้นหาการเปลี่ยนแปลง ให้เริ่มต้นด้วยรายการกรองของอินสแตนซ์ระดับอ้างอิงที่มีเฉพาะช่วงที่ข้ามระดับอ้างอิงต่ำหรือสูง แต่ละระดับอ้างอิงทันทีในรายการมีดัชนีและทิศทางที่สอดคล้องกัน (เช่น ดัชนีการติดตามทันทีก่อนแอมพลิจูดข้ามระดับอ้างอิง และทิศทางที่ระบุว่าการติดตามข้ามจากด้านบนไปด้านล่างระดับอ้างอิงหรือกลับกัน)
รายการอินสแตนซ์ที่กรองแล้วนี้จะถูกจัดเรียงตามลำดับดัชนีจากน้อยไปมาก จากนั้นจะพบช่วงการเปลี่ยนภาพเชิงบวกและเชิงลบทั้งหมด (ระหว่างระดับอ้างอิงสูง/ต่ำ) โดยการค้นหาช่วงเวลาที่ต่อเนื่องกันในรายการที่กรองซึ่งทั้งคู่มีทิศทางเดียวกัน รูปคลื่นถูกกำหนดให้อยู่ใน "สถานะสูง" หากเกินระดับอ้างอิง 90% และอยู่ใน "สถานะต่ำ" หากลดลงต่ำกว่าระดับอ้างอิง 10% นี่เป็นทางเลือกทางเลือกแทนที่จะใช้ขอบเขตบน/ล่างของรัฐ (ซึ่งมาตรฐาน IEEE ระบุว่าเป็นทางเลือก)
การหาระยะเวลาและระยะเวลาของชีพจร
ระยะเวลาของพัลส์ถูกกำหนดโดยใช้ทรานซิชันบวกและลบตามที่อธิบายไว้ข้างต้นเพื่อตรวจสอบว่าเป็นพัลส์ที่ถูกต้องหรือไม่ ถ้าเป็นเช่นนั้น ระดับอ้างอิงระยะเวลาชีพจรใดๆ (50%) จะถูกตรวจสอบว่ามีอยู่ภายในการเปลี่ยนแปลงเชิงบวก/เชิงลบ ระดับอ้างอิงนี้กำหนดระยะเวลาเริ่มต้นและสิ้นสุดของชีพจร ระยะเวลาเป็นเพียงความแตกต่างระหว่างจุดสิ้นสุดและจุดเริ่มต้น ช่วงชีพจรยังเป็นตัวกำหนดก่อนว่าเรามีชีพจรที่ถูกต้องจากช่วงการเปลี่ยนภาพทางบวกและทางลบ ต่างจากการวัดระยะเวลาของพัลส์ ช่วงเวลาของพัลส์ต้องมีการทำซ้ำของพัลส์หรือพัลส์เทรน เพื่อวัด ควรมีการเปลี่ยนอย่างน้อย 3 ครั้งในระดับอ้างอิง 50% เพื่อสร้างการวัดที่ถูกต้อง คาบคือระยะห่างระหว่างระดับเริ่มต้นของพัลส์แรกกับระดับเริ่มต้นของพัลส์ที่สอง
การหาค่าเฉลี่ยคลื่น
ค่าเฉลี่ยของคลื่นถูกกำหนดโดยค่าเฉลี่ยระดับพลังงานของทุกจุดภายในระยะเวลาทั้งหมดที่มีอยู่ในการติดตาม ในการกำหนดตำแหน่งที่จะเริ่มต้นและหยุด จำนวนช่วงการเปลี่ยนภาพจะใช้เพื่อกำหนดว่ามีอย่างน้อยหนึ่งช่วงเต็มหรือไม่ ระบบจะคืนค่าเป็น “น่าน” หากไม่มีระยะเวลาเต็ม มิฉะนั้น จุดเริ่มต้นของการวัดนี้คือจุดเริ่มต้นของการเปลี่ยนแปลงครั้งแรก และจุดสิ้นสุดคือจุดเริ่มต้นของการเปลี่ยนแปลงของช่วงระยะเวลาเต็มครั้งล่าสุด
ตัวอย่างเช่น การติดตามที่มีการเปลี่ยนหกครั้งจะมีจำนวนจุดก่อนการเปลี่ยนครั้งแรกตามด้วยช่วงเต็มสองช่วง จากนั้นตามด้วยช่วงเต็มน้อยกว่าหนึ่งช่วง เมื่อพบจุดเริ่มต้นและจุดสิ้นสุดของช่วงเวลาทั้งหมดแล้ว จุดทั้งหมดระหว่างช่วงเวลาเหล่านั้นจะถูกรวมเข้าด้วยกันและหารด้วยจำนวนจุดทั้งหมดที่ใช้ในการวัด
การหาค่าเฉลี่ยตามรอย
ค่าเฉลี่ยการติดตามคือค่าเฉลี่ยแบบเอ็กซ์โพเนนเชียลของจุดทั้งหมดในการติดตาม ไม่เหมือนกับค่าเฉลี่ยของคลื่น มันไม่ได้ถูกจำกัดให้เต็มพัลส์
การหาค่าเฉลี่ยชีพจร
ค่าเฉลี่ยของพัลส์คือค่าเฉลี่ยของจุดที่อยู่ในสถานะสูงของพัลส์ (โดยทั่วไปคือจุดที่อยู่เหนือเส้นอ้างอิง 90%) สิ่งนี้ใช้ได้กับพัลส์บวกเท่านั้น หากไม่มีชีพจรบวก จะไม่มีการวัดค่ากลับมา
การค้นหา Pulse Center ทันทีและความถี่การทำซ้ำ
ความถี่การเกิดซ้ำของพัลส์ถูกกำหนดจากค่าผกผันของคาบพัลส์ (1/คาบพัลส์) เป็นค่าความถี่ ทันทีของศูนย์ชีพจรจะกำหนดโดยการหาระยะเวลาของพัลส์ (50%) เวลาเริ่มต้นและเพิ่มจุดกึ่งกลางของระยะเวลาพัลส์ ซึ่งเท่ากับครึ่งหนึ่งของระยะเวลาพัลส์ (ระยะเวลาพัลส์/2)
หาชีพจรพีค
พีคพัลส์คือค่าสูงสุดในรูปคลื่นหลังจากทรานซิชันที่เป็นบวก หากไม่มีการเปลี่ยนแปลงในเชิงบวก แอมพลิจูดสูงสุดของรูปคลื่นโดยรวมจะถูกส่งกลับ
ค้นหา Pulse Tilt
ความลาดเอียงของพัลส์วัดการบิดเบือนของสถานะรูปคลื่นซึ่งความชันโดยรวมของรัฐนั้นคงที่โดยพื้นฐานแล้วและมีค่าอื่นที่ไม่ใช่ศูนย์ ความชันอาจมีขั้วอย่างใดอย่างหนึ่งและคำนวณสำหรับพัลส์ลบหรือบวก จำเป็นต้องใช้พัลส์ที่สมบูรณ์ (ที่มีการเปลี่ยนอย่างน้อยสองครั้ง) เพื่อให้แน่ใจว่ามีสถานะรูปคลื่นที่สามารถวัดความเอียงได้ หากมีข้อมูลการติดตามภายในสถานะรูปคลื่นเพียงพอ 25% ของตัวอย่างแรกและสุดท้ายที่เกิดการบิดเบือนเกินมักจะเกิดขึ้น ความชันของข้อมูลการติดตามสถานะที่เหลืออีก 50% จะถูกคำนวณโดยใช้วิธีกำลังสองน้อยที่สุด และความลาดเอียงคำนวณโดยการคูณความชันด้วยจำนวนจุดติดตามในรัฐ
การหาแอมพลิจูดของคลื่น
แอมพลิจูดของคลื่นหาได้โดยการลบแอมพลิจูดของระดับสถานะล่างออกจากแอมพลิจูดของระดับสถานะบนในหน่วย dB
การหาจุดสูงสุดสู่คลื่นเฉลี่ย
ค่าเฉลี่ยพีคถึงเวฟหาได้โดยการลบค่าเฉลี่ยของคลื่นออกจากพีคพัลส์ในรูปของเดซิเบล สิ่งนี้ต้องการให้ค่าเฉลี่ยของคลื่นมีค่าที่ถูกต้อง ดังนั้นต้องมีอย่างน้อยหนึ่งช่วงเต็มสำหรับ a การวัด.
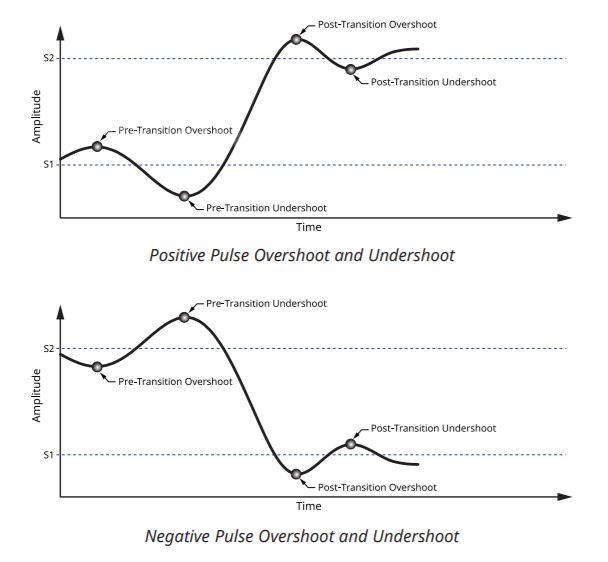
การค้นหาพื้นที่ความคลาดเคลื่อนก่อนและหลังการเปลี่ยนแปลง
ขอบเขตความคลาดเคลื่อนก่อนการเปลี่ยนแปลงถูกกำหนดให้เป็นขอบเขตของรอยก่อนการข้ามสถานะสุดท้ายก่อนการเปลี่ยนครั้งแรก และมีความกว้างเท่ากับสามเท่าของระยะเวลาของการเปลี่ยนแปลงครั้งแรก มีขอบเขตบนโดยข้อมูลการติดตามที่มีอยู่ก่อนการเปลี่ยนแปลง บริเวณความคลาดเคลื่อนหลังการเปลี่ยนแปลงคือบริเวณที่เริ่มต้นที่สถานะแรกที่ข้ามผ่านการเปลี่ยนแปลงครั้งแรก และสิ้นสุดที่ระยะเวลาการเปลี่ยนแปลงสามเท่าหรือที่จุดเริ่มต้นของการเปลี่ยนแปลงครั้งถัดไป แล้วแต่ว่าจะถึงอย่างใดก่อน
การค้นหาพื้นที่ความคลาดเคลื่อนก่อนและหลังการเปลี่ยนแปลง
ขอบเขตความคลาดเคลื่อนก่อนการเปลี่ยนแปลงถูกกำหนดให้เป็นขอบเขตของรอยก่อนการข้ามสถานะสุดท้ายก่อนการเปลี่ยนครั้งแรก และมีความกว้างเท่ากับสามเท่าของระยะเวลาของการเปลี่ยนแปลงครั้งแรก มีขอบเขตบนโดยข้อมูลการติดตามที่มีอยู่ก่อนการเปลี่ยนแปลง บริเวณความคลาดเคลื่อนหลังการเปลี่ยนแปลงคือบริเวณที่เริ่มต้นที่สถานะแรกที่ข้ามผ่านการเปลี่ยนแปลงครั้งแรก และสิ้นสุดที่ระยะเวลาการเปลี่ยนแปลงสามเท่าหรือที่จุดเริ่มต้นของการเปลี่ยนแปลงครั้งถัดไป แล้วแต่ว่าจะถึงอย่างใดก่อน


การค้นหาการโอเวอร์ชูตและอันเดอร์ชูตของแต่ละภูมิภาคที่มีความคลาดเคลื่อน
โอเวอร์ชูตและอันเดอร์ชูตของแต่ละภูมิภาคคำนวณโดยนำความแตกต่างระหว่างค่าการติดตามสูงสุดและต่ำสุดของแต่ละภูมิภาคที่มีความคลาดเคลื่อนและระดับรัฐในท้องถิ่น ระดับรัฐในพื้นที่ (ต่ำ = ก่อนการเปลี่ยนแปลง → สูง = หลังการเปลี่ยนแปลง) ในการเปลี่ยนแปลงเชิงบวก และ (สูง = ก่อนการเปลี่ยนแปลง → ต่ำ = หลังการเปลี่ยนแปลง) ในการเปลี่ยนแปลงเชิงลบ