

היתרונות של מנועי DC ללא מברשות (BLDC) ברורים, והם משמשים ביישומים רבים ברכבים ובמקומות אחרים. עם זאת, בעוד שהם חזקים יותר, קלים ויעילים יותר הם נשארים יקרים יותר ודורשים שליטה מורכבת יותר ממנועי DC מוברשים. המשמעות היא שיש לקחת בחשבון איזה סוג מנוע מתאים ביותר לכל יישום ברכב. באופן כללי, ככל שמשתמשים פחות במנוע במהלך נסיעה, כך עולה התועלת בשימוש במנוע DC מוברש.
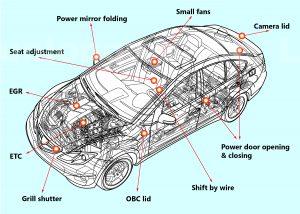

איור 1: ישנם יישומים רבים עבור מנועים ברכב המודרני
ביישומים מוטוריים רבים, מיקרו-בקר (MCU) בתוך ה- ECU מקבל כניסות שליטה באמצעות CAN או LIN. אותות אלה מומרים לאותות בקרת מנוע מנועי דופק (PWM) ומשמשים לשליטה במתגי ההפעלה (בדרך כלל מוספים מכשירים) המניעים את המנוע באמצעות נהג שער כדי להגביר את ההספק. ה- MOSFET מוגדרים כגשר H המאפשר למנוע להסתובב בשני הכיוונים ועם אותות PWM לשלוט על מהירות הרוטור.
עם הצורך בעיצוב קומפקטי ואמין, נדרשות גישות משולבות. שילוב שלב ה- MCU וטרום הנהג הוא אופציה אם כי תוכנת ה- MCU עבור ה- MCU נבדקת ואושרה על ידי בטיחות, כך שהצורך להעביר את התוכנה ולאמת אותה מחדש מונע גישה זו.
חלופה היא להשתמש במנהל בקרת מנוע (MCD) המשלב את הנהג המקדים עם גשר ה- H. זה מספק מידה גבוהה של אינטגרציה תוך השארת מעצבים לבחירה חופשית של MCU ותוכנות נלוות.
TB9053FTG ו-TB9054FTG של Toshiba שהוצגו לאחרונה מבוססים על מורשת בתחום האלקטרוניקה לרכב משנות ה-1970. נהגי מנוע DC דו-ערוציים אלה משתמשים ב-BiCD חזק טֶכנוֹלוֹגִיָה, המשלב את התכונות הטובות ביותר של דו קוטבי, CMOS ו-DMOS. כל מכשיר משלב שני גשרים H של מתגי DMOS N-channel, מנהלי התקנים מקדימים ומספר תכונות אבחון ובקרה המאפשרות ליצרני OEM לרכב לאתר במהירות את המקור לכשלים תפקודיים.
המכשירים יכולים לפעול במצב SMALL, תומכים בזוג מנועי 5 A, או במצב LARGE, באמצעות שני ערוצים מקבילים לשליטה במנוע 10 A. תהליך ה- BiCD של טושיבה מספק עמידות נתיב נמוכה של 290 mΩ בלבד, ובכך ממזער את ייצור החום וצרכי הניהול התרמי. שילוב הקבלים למשאבות הטעינה לפני הנהג מפחית עוד יותר את מספר הרכיבים והחלל החיצוניים. התכנון המתקדם מאפשר להשתמש במחזורי חובה של עד 100%.
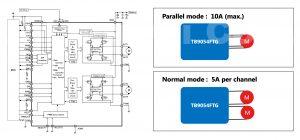 |
| איור 2: TB905xFTG יכול לספק עד 5 A לערוץ עבור שני מנועים במצב SMALL, או עד 10 A במצב LARGE עבור מנוע יחיד. |

לארבעת הגשרים המשולבים יש כניסות PWM בודדות שניתן להניע במהירות מ -1 קילוהרץ ל -20 קילוהרץ. להפעלה בטוחה, הכנסת דדיים מטופלת בחומרת ההתקן, בעוד שסיכות אחרות תומכות בתצורת ההתקן ומפעילות / משביתות.
ממשק ה- SPI המובנה מעניק אפשרויות תצורה מרובות וגישה לנתוני אבחון, כמו גם מאפשר לשרשור דייזי רב-התקני לשלוט בכמה מנועים. ניתן להגדיר סף זרם יתר בין 4.6 A ל- 6.5 A במצב SMALL או 9.2 A ו- 13.0 במצב LARGE.
ניתן להפעיל את נהג המנוע אך ורק באמצעות SPI באמצעות מתנד משולב 16 מגה-הרץ ובקר PWM, ובכך להפחית את ספירת האותים הנדרשת מ- MCU. פלט שעון MCU יחיד מספק את בסיס הזמן, ואם זה נכשל, המתנד הפנימי יכול לספק יכולת 'צליעה ביתית'.
 |
| איור 3: שימוש בממשק SPI יכול להפחית את מספר הפינים MCU הנדרש |

מכיוון שזרמי מנוע גדולים קיימים, העמידה בדרישות התאימות האלקטרומגנטית (EMC) היא מאתגרת, ולכן ה- TB905xFTG מציע שבעה שיעורי סיבוב (1.09 עד 26.25 V / µs) שיסייעו בכך. עמידות נמוכה נמוכה ממזערת יצירת חום. כל חום שנוצר מתפזר במהירות באמצעות האריזה המשופרת תרמית של TB9053FTG כאשר גוף קירור משולב משיג עמידות תרמית של 0.67 מעלות צלזיוס / רוחב בלבד, כלומר PCB יכול לספק את גוף הקירור הנדרש בעיצובים מסוימים. TB9054FTG נמצא באריזת VQFN מרובעת בגודל 6 מ"מ עם גובה של 0.5 מ"מ ונקודות לחות, מה שהופך מכשיר AEC-Q100 לאידיאלי לבדיקה אופטית אוטומטית (AOI), כמועדף על ידי תעשיית הרכב.
<br> סיכום
בעוד יישומים רבים משתמשים כיום ב- BLDC, מספר יישומי רכב ימשיכו להשתמש במנועי DC מוברשים מסיבות מורכבות ועלויות. TB905xFTG של טושיבה משתמש בתהליך BiCD מתקדם כדי לספק בקרת מנוע משולבת מאוד הניתנת להגדרה ויעילה. המכשירים ממלאים דרישות קפדניות לאיכות רכב ולבדוק תוך שמירה על רכיבי MCU קיימים והתוכנה המוסמכת שהם מבצעים.