

Les avantages des moteurs à courant continu sans balais (BLDC) sont clairs et ils sont utilisés dans de nombreuses applications dans les véhicules et ailleurs. Cependant, bien que plus puissants, plus légers et plus efficaces, ils restent plus chers et nécessitent un contrôle plus complexe que les moteurs à courant continu à balais. Cela signifie qu'il faut considérer quel type de moteur est le plus approprié pour chaque application dans un véhicule. En général, moins le moteur est utilisé pendant un trajet, plus l'avantage d'utiliser un moteur à courant continu à balais est grand.
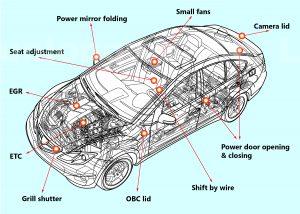

Figure 1 : Il existe de nombreuses applications pour les moteurs dans l'automobile moderne
Dans de nombreuses applications de moteur, un microcontrôleur (MCU) dans l'ECU reçoit des entrées de commande via CAN ou LIN. Ces signaux sont convertis en signaux de commande de moteur à modulation de largeur d'impulsion (PWM) et sont utilisés pour contrôler les interrupteurs d'alimentation (généralement mosfet dispositifs) qui entraînent le moteur à l'aide d'un pilote de grille pour augmenter la puissance. Les MOSFET sont configurés comme un pont en H qui permet au moteur de tourner dans les deux sens et avec des signaux PWM, contrôler la vitesse du rotor.
Avec le besoin de conceptions compactes et fiables, des approches intégrées sont nécessaires. L'intégration du MCU et de l'étape de pré-pilote est une option bien que le logiciel MCU pour le MCU soit testé et approuvé en matière de sécurité, de sorte que la nécessité de porter et de recertifier le logiciel exclut cette approche.
Une alternative consiste à utiliser un pilote de commande de moteur (MCD) qui intègre le pré-pilote avec le pont en H. Cela offre un haut degré d'intégration tout en laissant aux concepteurs le libre choix du MCU et du logiciel associé.
Les TB9053FTG et TB9054FTG récemment introduits par Toshiba s'appuient sur un héritage dans le domaine de l'électronique automobile des années 1970. Ces pilotes de moteur CC à double canal utilisent un BiCD robuste sans souci, combinant les meilleures fonctionnalités du bipolaire, du CMOS et du DMOS. Chaque dispositif intègre deux ponts en H de commutateurs DMOS canal N, des prépilotes et plusieurs fonctionnalités de diagnostic et de contrôle qui permettent aux constructeurs automobiles de localiser rapidement la source des pannes fonctionnelles.
Les appareils peuvent fonctionner en mode SMALL, prenant en charge une paire de moteurs 5 A, ou en mode LARGE, en utilisant deux canaux parallèles pour contrôler un moteur 10 A. Le processus BiCD de Toshiba offre une faible résistance de chemin de seulement 290 mΩ, minimisant ainsi les besoins de génération de chaleur et de gestion thermique. L'intégration des condensateurs pour les pompes de charge pré-pilote réduit encore le nombre de composants externes et l'espace. La conception avancée permet d'utiliser des cycles de service allant jusqu'à 100 %.
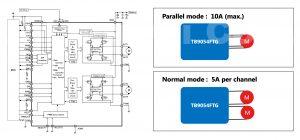 |
| Figure 2 : Le TB905xFTG peut délivrer jusqu'à 5 A par canal pour deux moteurs en mode SMALL, ou jusqu'à 10 A en mode LARGE pour un seul moteur. |

Les quatre demi-ponts intégrés ont des entrées PWM individuelles qui peuvent être pilotées à des vitesses de 1 kHz à 20 kHz. Pour un fonctionnement sûr, l'insertion du temps mort est gérée dans le matériel de l'appareil, tandis que d'autres broches prennent en charge la configuration et l'activation/la désactivation de l'appareil.
L'interface SPI intégrée offre de multiples options de configuration et un accès aux données de diagnostic, ainsi qu'une connexion en guirlande multi-appareils pour contrôler plusieurs moteurs. Un seuil de surintensité peut être réglé entre 4.6 A et 6.5 A en mode SMALL ou 9.2 A et 13.0 en mode LARGE.
Le pilote de moteur peut être utilisé uniquement via SPI à l'aide d'un oscillateur 16 MHz et d'un contrôleur PWM intégrés, réduisant ainsi le nombre de signaux requis du MCU. Une seule sortie d'horloge MCU fournit la base de temps et, en cas d'échec, l'oscillateur interne peut fournir une capacité de « limp-home ».
 |
| Figure 3 : L'utilisation de l'interface SPI peut réduire le nombre de broches MCU requises |

Étant donné que des courants de moteur importants sont présents, il est difficile de répondre aux exigences de compatibilité électromagnétique (CEM). Le TB905xFTG offre donc sept vitesses de balayage (1.09 à 26.25 V/µs) pour vous aider. La faible résistance à l'enclenchement minimise la génération de chaleur. Toute chaleur générée est rapidement dissipée via le boîtier thermiquement amélioré du TB9053FTG où un dissipateur thermique intégré atteint une résistance thermique de seulement 0.67°C/W, ce qui signifie qu'un PCB peut fournir le dissipateur thermique requis dans certaines conceptions. Le TB9054FTG est dans un boîtier VQFN de 6 mm carré avec un pas de broche de 0.5 mm et des flancs mouillables, ce qui rend ce dispositif AEC-Q100 idéal pour l'inspection optique automatisée (AOI), comme le préfère l'industrie automobile.
Résumé
Alors que de nombreuses applications utilisent désormais des BLDC, un certain nombre d'applications automobiles continueront d'utiliser des moteurs à courant continu à balais pour des raisons de complexité de conception et de coût. Le TB905xFTG de Toshiba utilise un processus BiCD avancé pour fournir une commande de moteur hautement intégrée, configurable et efficace. Les appareils répondent à des exigences strictes en matière de qualité et d'inspection automobile tout en conservant les MCU existants et le logiciel certifié qu'ils exécutent.