Правильная последовательность подключения нескольких шин питания в системе является критически важной функцией и может быть достигнута с использованием различных подходов.
Опытные проектировщики знают, что один из самых рискованных периодов в рабочем цикле изделия — это момент включения питания. На этом этапе включения питания каждая из нескольких шин питания должна достичь своего номинального значения в правильном порядке, в пределах заданного временного окна, без переходных процессов, звонков или перерегулирований.
Если последовательность неверна, в лучшем случае система не «загрузится» должным образом или ее производительность будет нестабильной (хотя при повторной попытке она может работать нормально); в худшем случае некоторые компоненты могут выйти из строя, что особенно опасно для силовых устройств. Обратите внимание, что выключение питания может иметь аналогичные временные требования с риском повреждения – конечно, до следующего раза, когда устройство будет включено, и устройство больше не будет работать так, как раньше.
Высокопроизводительная микросхема, такая как FPGA, может иметь полдюжины или более отдельных шин питания постоянного тока для поддержки ядра устройства, оперативной памяти, внутренних буферов и внешних устройств ввода-вывода, таких как I.2C, SPI, LVDS и другие порты. Эти шины могут иметь разные, но близко расположенные номинальные значения, например 1.2 В, 1.5 В и 1.7 В, или несколько из этих шин могут иметь одно и то же номинальное значение, но с разными допусками или физическим расположением. Аналогичным образом, высокоинтегрированная микросхема, ориентированная на конкретное приложение, такая как Wi-Fi сетевой узел может иметь несколько шин для поддержки внутренних функций, а также интерфейсных напряжений, требуемых отраслевым стандартом, или биполярного источника питания для драйвера антенны и ее усилителя мощности.
Количество шин питания не заканчивается на этой единственной микросхеме. Количество таких шин часто будет увеличиваться вместе с полной системой, которая может иметь драйверы двигателей, силовые МОП-транзисторы.IGBTs или специальные интерфейсы связи, такие как Ethernet или даже устаревшие порты RS-232/422. В результате, независимо от физического размера, вся система может иметь десять или более шин, питаемых от независимых регуляторов постоянного тока (также называемых преобразователями мощности).
Задача проектировщика состоит в том, чтобы гарантировать, что при подаче первичного питания – будь то через дискретный двухпозиционный переключатель или его эквивалент с программным переключением – эти шины включаются до своего полного, конечного значения в тщательно спланированной последовательности (Рисунок 1).

Даже если нет необратимого повреждения, эксплуатационные сбои могут быть неприемлемым последствием неправильной последовательности: рассмотрите эффект включения полевых МОП-транзисторов, питающих двигатель, до того, как программное обеспечение управления двигателем будет инициализировано и готово управлять этими МОП-транзисторами. Эти проблемы также не обязательно должны быть связаны с формальным событием включения питания; вместо этого они могут быть вызваны установкой плат в конструкции с «горячей заменой».
Для решения этих проблем доступны специализированные микросхемы управления питанием (PMIC), которые реализуют последовательность и синхронизацию питания. Полнофункциональный PMIC позволяет инженеру-проектировщику:
- установить последовательность включения/выключения на нескольких рельсах относительно друг друга.
- при необходимости контролировать скорость повышения/понижения каждого рельса.
- управлять различными рельсами, если какой-либо из них выйдет из строя.
Как правило, время между рельсами определяется напряжением рельсов, а не абсолютными значениями времени и задержками, а период времени между «включением» последовательных рельсов составляет порядка миллисекунд. Рекомендации по взаимосвязи варьируются от простых, таких как «включать шину питания B только тогда, когда включена шина питания A», до более сложных, таких как «включать шину питания C только тогда, когда обе шины A и B находятся под конечным напряжением». Обратите внимание, что «включено» определяется требованиями приложения и чаще всего составляет 90% конечного напряжения на шине, но в критических приложениях оно может быть достигнуто в пределах пяти или даже 2% от конечного напряжения.
Несмотря на то, что в большинстве проектов решающее значение имеет напряжение, а не само время, в некоторых конструкциях в качестве критерия заменяется время. Это возможно, если проектировщик знает, что для достижения желаемого значения конкретной шине напряжения требуется четко определенное время, и время гораздо легче измерить точно, чем напряжение.
В этих случаях такое правило, как «включите питание A, как только питание B включено», преобразуется в «включите питание B через 50 миллисекунд после включения питания A». Однако этот подход следует использовать с осторожностью, поскольку нет никакой проверки того, что напряжение питания А действительно достигло желаемого значения, за исключением того, что «на данный момент все должно быть в порядке».
Некоторые PMIC объединяют в себе регуляторы постоянного/постоянного тока (LDO и коммутацию), а также необходимую последовательность. Они оптимизированы для целевого приложения, такого как ноутбуки (процессор, память, дисплей, ввод-вывод и другие стандартные функции). Хотя они, очевидно, хорошо подходят для предполагаемого применения и должны рассматриваться в этом контексте, они также по своей сути ограничивают общую гибкость в выборе проектировщиком шин и типов напряжения для других применений.
Требование последовательности источников питания не ново. Например, для электронных ламп, которые в настоящее время в значительной степени устарели из-за микросхем, за исключением специализированных приложений, таких как рентгеновские аппараты или передатчики радио- и телевещания, это общее требование. Нить трубки, возможно, придется включить и достичь конечной рабочей температуры, прежде чем на пластину трубки можно будет подать напряжение «B+». Эта временная задержка колеблется от нуля для легендарных потребительских пятиламповых AM-радиоприемников 1940-х и 1950-х годов до многих минут для ламп, используемых в вещательных передатчиках киловаттного диапазона.
Последовательность иногда реализуется системным оператором вручную с помощью переключателей включения/выключения; в остальных случаях используется специальное электромеханическое реле со встроенным таймером. Конечно, ни ручное управление, ни релейное решение не являются практичными или желательными для большинства сегодняшних продуктов, особенно тех, которые ориентированы на массовые рынки и среднего потребителя.
Начните с физического уровня
При любом обсуждении последовательности мощности следует иметь в виду два аспекта: управляющий сигнал, поступающий от секвенсора, и соответствующий управляющий вход на каждом DC. регулятор.


Очевидно, что секвенсор должен иметь достаточное количество управляющих выходов, а в некоторых случаях также иметь возможность расширения количества при необходимости. Эти выходы представляют собой простые управляющие сигналы логического уровня.
Дополнительные стабилизаторы постоянного тока, которые они активируют, должны либо иметь один вход включения контакта (EN), либо пользователь должен добавить электронный переключатель (обычно MOSFET) между выходом регулятора и физической шиной питания, которую он управляет, а затем управлять этим переключателем. (Рисунок 2).
Как правило, предпочтительнее выбрать стабилизатор постоянного тока, который имеет простое управление включением на логическом уровне, если таковое имеется, или выбрать PMIC, который может напрямую управлять включением/выключением дискретной шины питания MOSFET с подходящими номинальными значениями тока/напряжения и не требует отдельный драйвер MOSFET.
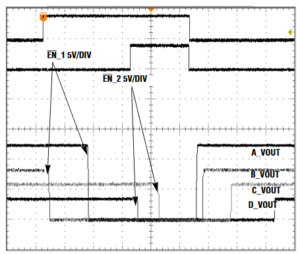
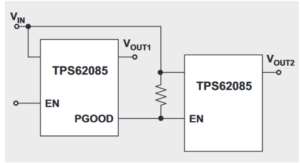
В простейшем случае последовательного управления, когда каждый рельс включается последовательно, когда другой рельс становится «хорошим», решение часто бывает простым. Если регулятор каждого предыдущего рельса имеет выход «хорошее питание» (PG), а следующий регулятор имеет вход управления «Включение», индикатор PG подключается к входу EN. Когда первый регулятор подает сигнал PG, он автоматически включает следующий и так далее по линии, создавая своего рода волновой эффект «гирляндной цепочки» (Рисунок 3).

Этот подход будет работать для любого количества последовательно соединенных регуляторов постоянного тока, но это достоинство также является его ограничением: они должны иметь последовательную схему (хотя один PG может быть подключен к более чем одному EN), и гибкость здесь невелика. Кроме того, этот подход не может контролировать время, когда один источник должен ждать определенный интервал времени перед включением, и он не может учитывать последовательность выключения, которая может быть так же важна, как и включение.
Чтобы преодолеть некоторые из этих проблем, для последовательности включения питания можно использовать микросхему сброса с управлением по таймеру. Почтенная и универсальная микросхема таймера 555 (или более новый вариант) может использоваться для управления последовательностью, вызывая период времени после того, как первый рельс достигает номинального значения окна или после отключения рельса. Период времени устанавливается пользователем аппаратно с помощью резисторов с 555, поэтому он определяется конструкцией и спецификацией, а не прошивкой (Рисунок 4). Хотя этот подход может показаться неэлегантным, он эффективен и особенно полезен, когда проблема с последовательностью становится видимой только после завершения проектирования и оценки прототипов плат (да, такое случается).


Для систем с большим количеством шин и необходимостью большей гибкости PMIC, такой как MAX16029 от Analog Devices/Maxim Integrated, может использоваться для четырех каналов, причем период задержки времени программируется пользователем через конденсаторы, что позволяет избежать нестабильности памяти или проблем при запуске. (Рисунок 5).


Каждый из четырех каналов независим от других, и выход каждого канала может использоваться в конфигурации с открытым стоком, которая поддерживает напряжение на шине до 28 В, необходимое для стабилизаторов постоянного тока более высокого диапазона. В других PMIC с этой функцией синхронизация устанавливается через интерфейс PMBus, а не через конденсаторы или резисторы, поэтому их можно подключать последовательно для работы с более чем четырьмя шинами.
В следующей части этой статьи рассматриваются высококлассные решения для секвенирования и их атрибуты.
Сопутствующий контент EE World
Если вы разрабатываете силовые микросхемы, вот несколько инструментов, которые следует учитывать.|
Выбор и применение программируемых источников питания
Устройство обеспечивает отказоустойчивое секвенирование шин питания FPGA
Контролирующие микросхемы устраняют головную боль при включении питания, часть 1
Контролирующие микросхемы устраняют головную боль при включении питания, часть 2
Внешние ссылки
Texas Instruments, «Упорядочение источников питания для FPGA».
Analog Devices, «Упрощенное определение последовательности источников питания»
Analog Devices: «Сложное определение последовательности источников питания стало проще»
Advanced Micro Devices, Inc., «Упрощенное регулирование мощности»
Микрочип Технологии, Inc., «Зачем необходимо регулирование мощности?»