Penjujukan yang betul bagi rel kuasa berbilang dalam sistem adalah fungsi kritikal dan boleh dicapai menggunakan pendekatan yang berbeza.
Pereka yang berpengalaman tahu bahawa salah satu tempoh paling berisiko dalam kitaran operasi produk ialah apabila kuasa dihidupkan. Fasa peningkatan kuasa ini ialah apabila setiap rel kuasa berbilang mesti menghasilkan nilai nominalnya dalam susunan yang betul, dalam tetingkap masa yang ditetapkan, dan tanpa transien, deringan, atau overshoot.
Jika penjujukan tidak betul, dalam kes terbaik, sistem tidak akan "boot" dengan betul, atau prestasinya akan menjadi tidak menentu (namun mungkin berfungsi dengan baik apabila mencuba semula); dalam kes yang paling teruk, sesetengah komponen akan rosak, yang merupakan risiko terutamanya dengan peranti kuasa. Ambil perhatian bahawa pemadaman kuasa mungkin mempunyai mandat pemasaan yang sama, dengan risiko kerosakan – sehingga kali berikutnya unit dikuasakan, sudah tentu, dan unit tidak lagi berfungsi di tempat ia berfungsi sebelum ini.
IC berprestasi tinggi seperti FPGA mungkin mempunyai setengah dozen atau lebih rel kuasa DC yang berbeza untuk menyokong teras peranti, RAM, penampan dalaman dan I/O luaran seperti I2C, SPI, LVDS dan port lain. Rel ini mungkin mempunyai nilai nominal yang berbeza tetapi jarak rapat seperti 1.2 V, 1.5 V, dan 1.7 V, atau beberapa rel ini mungkin mempunyai nilai nominal yang sama tetapi dengan toleransi atau lokasi fizikal yang berbeza. Begitu juga, IC khusus aplikasi yang sangat bersepadu seperti a Wi-Fi nod rangkaian mungkin mempunyai berbilang rel untuk menyokong fungsi dalaman serta voltan antara muka yang diperlukan oleh standard industri atau bekalan bipolar untuk pemacu antena dan penguat kuasanya.
Kiraan rel kuasa tidak berakhir dengan IC tunggal itu. Bilangan rel tersebut selalunya akan meningkat lagi dengan sistem yang lengkap, yang mungkin mempunyai pemandu motor, MOSFET kuasa/IGBTs, atau antara muka komunikasi khas seperti Ethernet atau port RS-232/422 warisan. Akibatnya, tanpa mengira saiz fizikal, sistem lengkap mungkin mempunyai sepuluh atau lebih rel yang diperolehi oleh pengawal selia DC bebas (juga dipanggil penukar kuasa).
Cabaran pereka bentuk adalah untuk memastikan bahawa apabila kuasa utama digunakan - sama ada melalui suis hidup-mati diskret atau suis lembut yang setara - rel ini berkuasa sehingga nilai akhir penuh mereka dalam urutan koreografi yang teliti (Rajah 1).

Walaupun tiada kerosakan kekal, kerosakan operasi mungkin merupakan akibat yang tidak boleh diterima daripada penjujukan yang salah: pertimbangkan kesan menghidupkan MOSFET kuasa motor sebelum perisian kawalan motor dimulakan dan bersedia untuk mengawal MOSFET tersebut. Masalah ini juga tidak perlu dikaitkan dengan acara kuasa rasmi; sebaliknya, ia boleh disebabkan oleh pemasukan kad litar dalam reka bentuk "hot swap".
Untuk menangani isu ini, IC pengurusan kuasa khusus (PMIC) tersedia yang melaksanakan penjujukan kuasa dan pemasaan. PMIC fungsi penuh membolehkan jurutera reka bentuk untuk:
- mewujudkan penjujukan hidup/mati merentasi berbilang rel berkenaan antara satu sama lain.
- mengawal kadar tanjakan naik/turun setiap rel, jika perlu.
- menguruskan pelbagai rel jika mana-mana rel tunggal gagal.
Secara amnya, masa antara rel ditentukan oleh voltan rel dan bukannya nilai masa mutlak dan ketinggalan, dan tempoh masa antara rel berturut-turut "dihidupkan" adalah mengikut tertib milisaat. Garis panduan saling perkaitan terdiri daripada mudah, seperti "hidupkan rel bekalan B hanya apabila rel A dihidupkan," atau lebih rumit, seperti "hidupkan rel bekalan C hanya apabila kedua-dua rel A dan B berada pada voltan akhir." Ambil perhatian bahawa "hidup" ditakrifkan oleh keperluan aplikasi dan selalunya 90% daripada voltan rel akhir, tetapi dalam aplikasi kritikal, ia boleh dicapai dalam tempoh lima atau bahkan 2% daripada voltan akhir.
Walaupun dalam kebanyakan reka bentuk voltan yang kritikal, bukan masa itu sendiri, sesetengah reka bentuk menggantikan pemasaan sebagai kriteria sebaliknya. Ini boleh dilakukan jika pereka bentuk mengetahui bahawa rel voltan tertentu mengambil masa yang ditentukan dengan baik untuk mencapai nilai yang dikehendaki, dan pemasaan adalah lebih mudah untuk diukur dengan tepat daripada voltan.
Dalam kes ini, peraturan seperti "hidupkan rel bekalan A setelah bekalan B dihidupkan" diterjemahkan kepada "rel belok B pada 50 milisaat selepas rel A dihidupkan." Walau bagaimanapun, pendekatan ini perlu digunakan dengan berhati-hati kerana tiada pengesahan bahawa rel bekalan A sebenarnya telah mencapai nilai yang dikehendaki, selain daripada "ia sepatutnya cukup OK pada masa ini."
Sesetengah PMIC menyepadukan kedua-dua pengawal selia DC/DC (LDO dan pensuisan) serta penjujukan yang diperlukan. Ia dioptimumkan untuk aplikasi sasaran seperti PC notebook (CPU, memori, paparan, I/O dan fungsi standard lain). Walaupun ini jelas sangat sesuai dengan aplikasi yang dimaksudkan dan harus dipertimbangkan dalam konteks itu, mereka juga secara semula jadi mengehadkan fleksibiliti keseluruhan dalam pilihan pereka bentuk rel voltan dan jenis untuk aplikasi lain.
Keperluan untuk menyusun bekalan kuasa bukanlah perkara baru. Sebagai contoh, untuk tiub vakum - kini sebahagian besarnya dibuat usang oleh IC kecuali untuk aplikasi khusus seperti mesin X-ray atau pemancar siaran radio/TV - ia adalah keperluan biasa. Filamen tiub mungkin perlu dihidupkan dan pada suhu operasi akhir sebelum plat tiub boleh ditenagakan oleh voltan “B+”nya. Kelewatan masa ini berjulat daripada sifar untuk radio AM lima tiub pengguna legenda pada tahun 1940-an dan 1950-an, hingga beberapa minit untuk tiub yang digunakan dalam pemancar siaran jarak kW.
Urutan ini kadangkala dilaksanakan secara manual oleh pengendali sistem melalui suis hidup/mati; dalam kes lain, geganti elektromekanikal khas dengan pemasa terbina dalam digunakan. Sudah tentu, kawalan manual mahupun penyelesaian berasaskan geganti tidak praktikal atau diingini untuk kebanyakan produk hari ini, terutamanya yang menyasarkan pasaran massa dan pengguna biasa.
Mulakan pada lapisan fizikal
Dalam sebarang perbincangan tentang penjujukan kuasa, terdapat dua aspek yang perlu diingat: isyarat kawalan yang datang daripada penjujukan dan input kawalan yang sepadan pada setiap DC pengatur.


Jelas sekali, penjujukan mesti mempunyai output kawalan yang mencukupi dan, dalam beberapa kes, juga mempunyai beberapa peruntukan untuk pengembangan nombor jika diperlukan. Output ini adalah isyarat kawalan tahap logik yang mudah.
Pengawal selia DC pelengkap yang mereka dayakan mesti sama ada mempunyai input pemboleh pin tunggal (EN), atau pengguna mesti menambah suis elektronik (biasanya MOSFET) antara output pengawal selia dan rel kuasa fizikal yang dipacunya, dan kemudian mengawal suis ini (Rajah 2).
Secara amnya adalah lebih baik untuk memilih pengawal selia DC yang mempunyai kawalan Dayakan tahap logik yang mudah, jika ada, atau pilih PMIC, yang boleh memacu secara langsung rel kuasa diskret hidup/mati MOSFET dengan penarafan arus/voltan yang sesuai dan tidak memerlukan pemacu MOSFET yang berasingan.
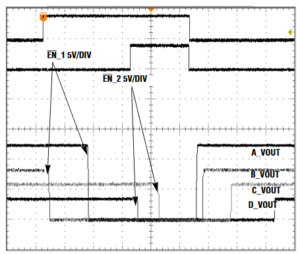
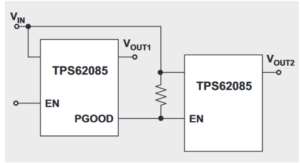
Dalam kes penjujukan jujukan yang paling mudah, di mana setiap rel dihidupkan secara bersiri apabila rel lain menjadi "baik", penyelesaiannya selalunya mudah. Jika setiap pengawal selia rel sebelumnya mempunyai keluaran “power good” (PG) dan pengawal selia seterusnya mempunyai input kawalan Dayakan, penunjuk PG disambungkan kepada input EN. Apabila pengawal selia pertama memberi isyarat PG, ia secara automatik menghidupkan yang seterusnya, dan seterusnya ke bawah sebagai sejenis kesan riak "rantai daisy" (Rajah 3).

Pendekatan ini akan berfungsi untuk mana-mana bilangan pengawal selia DC secara bersiri, tetapi kebaikan itu juga merupakan hadnya: mereka mesti mempunyai corak berjujukan (walaupun satu PG boleh disambungkan kepada lebih daripada satu EN), dan terdapat sedikit fleksibiliti. Selain itu, pendekatan ini tidak boleh mengawal pemasaan apabila satu bekalan mesti menunggu selang masa tertentu sebelum dihidupkan, dan ia tidak dapat menangani penjujukan penyingkiran, yang mungkin sama pentingnya dengan penyalaan.
Untuk mengatasi beberapa isu ini, set semula IC dengan kawalan pemasa boleh digunakan untuk penjujukan kuasa. IC pemasa 555 yang dihormati dan serba boleh (atau varian yang lebih baharu) boleh digunakan untuk mengawal penjujukan dengan menggunakan tempoh masa selepas rel pertama mencapai nilai tetingkap nominal atau selepas rel ditutup. Tempoh masa ditetapkan dalam perkakasan oleh pengguna menggunakan perintang dengan 555, jadi ia ditubuhkan oleh reka bentuk dan BOM, bukan firmware (Rajah 4). Walaupun ini mungkin tidak kelihatan sebagai pendekatan yang elegan, ia adalah pendekatan yang berkesan, terutamanya berguna apabila masalah penjujukan kelihatan hanya selepas reka bentuk selesai dan papan prototaip sedang dinilai (ya, itu berlaku).


Untuk sistem dengan lebih banyak rel dan memerlukan lebih fleksibiliti, PMIC seperti MAX16029 daripada Peranti Analog/Maxim Integrated boleh digunakan untuk empat saluran, dengan tempoh tunda masa yang diprogramkan pengguna melalui kapasitor, dengan itu mengelakkan ketidaktentuan memori atau isu permulaan. (Rajah 5).


Setiap satu daripada empat saluran adalah bebas daripada yang lain, dan setiap output saluran boleh digunakan dalam konfigurasi longkang terbuka yang menyokong voltan rel sehingga 28 V, diperlukan untuk pengawal selia DC julat lebih tinggi. PMIC lain dengan fungsi ini mempunyai masa mereka ditetapkan melalui antara muka PMBus dan bukannya kapasitor atau perintang, dan seterusnya boleh dirantai daisy untuk mengendalikan lebih daripada empat rel.
Bahagian seterusnya artikel ini melihat penyelesaian penjujukan yang lebih tinggi dan atributnya.
Kandungan Dunia EE Berkaitan
Jika anda mereka bentuk IC kuasa, berikut ialah beberapa alatan untuk dipertimbangkan|
Memilih dan menggunakan bekalan kuasa boleh atur cara
Peranti Mendayakan Jujukan Kalis Kerosakan Rel Kuasa FPGA
IC penyeliaan menjinakkan sakit kepala gangguan kuasa, Bahagian 1
IC penyeliaan menjinakkan sakit kepala gangguan kuasa, Bahagian 2
Rujukan Luaran
Texas Instruments, "Penjujukan bekalan kuasa untuk FPGA"
Peranti Analog, "Penjujukan Bekalan Kuasa Dipermudahkan"
Peranti Analog, “Penjujukan Bekalan Kuasa Kompleks Dipermudahkan
Advanced Micro Devices, Inc., "Penjujukan Kuasa Mudah"
Microchip Teknologi, Inc., “Mengapa Penjujukan Kuasa Diperlukan?”