Il corretto sequenziamento di più binari di alimentazione in un sistema è una funzione fondamentale e può essere realizzato utilizzando approcci diversi.
I progettisti esperti sanno che uno dei periodi più rischiosi nel ciclo operativo di un prodotto è quando viene acceso. Questa fase di accensione avviene quando ciascuno dei molteplici binari di alimentazione deve raggiungere il proprio valore nominale nell'ordine corretto, entro un intervallo di tempo designato e senza transitori, squilli o superamenti.
Se la sequenza non è corretta, nel migliore dei casi, il sistema non si “avvierà” correttamente o le sue prestazioni saranno irregolari (e tuttavia potrebbero funzionare correttamente anche dopo un tentativo); nel peggiore dei casi, alcuni componenti si danneggeranno, il che è un rischio soprattutto con i dispositivi di potenza. Si noti che lo spegnimento può avere tempistiche simili, con il rischio di danni – fino alla successiva accensione dell'unità, ovviamente, e l'unità non funziona più come prima.
Un circuito integrato ad alte prestazioni come un FPGA può avere una mezza dozzina o più binari di alimentazione CC distinti per supportare il core del dispositivo, la RAM, i buffer interni e gli I/O esterni come I2C, SPI, LVDS e altre porte. Questi binari possono avere valori nominali diversi ma ravvicinati come 1.2 V, 1.5 V e 1.7 V, oppure diversi di questi binari possono avere lo stesso valore nominale ma con tolleranze o posizioni fisiche diverse. Allo stesso modo, un circuito integrato altamente integrato e specifico per l'applicazione come a Wi-Fi il nodo di rete può avere più binari per supportare le funzioni interne nonché le tensioni di interfaccia richieste da uno standard industriale o un'alimentazione bipolare per il driver dell'antenna e il suo amplificatore di potenza.
Il numero dei power-rail non si esaurisce con quel singolo circuito integrato. Il numero di tali binari aumenterà spesso ulteriormente con il sistema completo, che può avere driver del motore, MOSFET di potenza/IGBTs, o interfacce di comunicazione speciali come Ethernet o anche porte RS-232/422 legacy. Di conseguenza, indipendentemente dalle dimensioni fisiche, il sistema completo può avere dieci o più binari alimentati da regolatori CC indipendenti (chiamati anche convertitori di potenza).
La sfida del progettista è garantire che quando viene applicata l'alimentazione primaria, tramite un interruttore on-off discreto o un interruttore soft equivalente, queste rotaie si accendano al loro valore finale completo in una sequenza attentamente coreografata (Figure 1 ).

Anche se non vi sono danni permanenti, i malfunzionamenti operativi possono essere una conseguenza inaccettabile di una sequenza errata: considerare l'effetto dell'accensione dei MOSFET di potenza del motore prima che il software di controllo del motore sia inizializzato e pronto a controllare tali MOSFET. Né questi problemi devono essere associati a un evento formale di accensione; possono invece essere dovuti all'inserimento di schede circuitali nei progetti “hot swap”.
Per far fronte a questi problemi, sono disponibili circuiti integrati specializzati di gestione dell'energia (PMIC) che implementano il sequenziamento e la temporizzazione dell'alimentazione. Un PMIC completo di tutte le funzioni consente al progettista di:
- stabilire una sequenza di accensione/spegnimento su più binari l'uno rispetto all'altro.
- controllare la velocità di salita/discesa di ciascuna rotaia, se necessario.
- gestire i vari binari in caso di guasto di un singolo binario.
Generalmente, la temporizzazione tra i binari è determinata dalle tensioni dei binari piuttosto che dai valori temporali assoluti e dai ritardi, e il periodo di tempo tra i binari successivi che vengono "accesi" è dell'ordine dei millisecondi. Le linee guida sulle interrelazioni spaziano da quelle semplici, come "attivare la guida B di alimentazione solo quando la guida A di alimentazione è attiva", a quelle più complicate, come "attivare la guida C di alimentazione solo quando entrambe le linee A e B sono alla tensione finale". Si noti che "on" è definito dai requisiti dell'applicazione e molto spesso corrisponde al 90% della tensione finale del rail, ma nelle applicazioni critiche può essere raggiunto entro il 2 o addirittura il XNUMX% della tensione finale.
Anche se nella maggior parte dei progetti è la tensione ad essere critica, non il tempo stesso, alcuni progetti sostituiscono invece il tempo come criterio. Ciò è possibile se il progettista sa che una specifica linea di tensione impiega un tempo ben definito per raggiungere il valore desiderato e che il tempo è molto più facile da misurare con precisione rispetto alla tensione.
In questi casi, una regola come "accendi la rotaia di alimentazione A una volta che la fornitura B è attiva" viene tradotta in "accendi la rotaia di B 50 millisecondi dopo che la rotaia di A è stata attivata". Tuttavia, questo approccio deve essere utilizzato con cautela poiché non vi è alcuna verifica che la rotaia dell'offerta A abbia effettivamente raggiunto il valore desiderato, oltre a "dovrebbe essere abbastanza ok in questo momento".
Alcuni PMIC integrano sia i regolatori DC/DC (LDO e commutazione) sia il sequenziamento richiesto. Sono ottimizzati per un'applicazione target come i PC notebook (CPU, memoria, display, I/O e altre funzioni standard). Sebbene questi siano ovviamente adatti all'applicazione prevista e debbano essere considerati in quel contesto, limitano anche intrinsecamente la flessibilità complessiva nella scelta da parte del progettista di binari di tensione e tipi per altre applicazioni.
L’esigenza di sequenziare gli alimentatori non è nuova. Ad esempio, per i tubi a vuoto – ora resi in gran parte obsoleti dai circuiti integrati, ad eccezione di applicazioni specializzate come macchine a raggi X o trasmettitori di trasmissioni radio/TV – è un requisito comune. Potrebbe essere necessario accendere il filamento del tubo e raggiungere la temperatura operativa finale prima che la piastra del tubo possa essere energizzata dalla sua tensione “B+”. Questo ritardo varia da zero per la leggendaria radio AM a cinque tubi degli anni '1940 e '1950, a molti minuti per i tubi utilizzati nei trasmettitori di trasmissione con portata kW.
La sequenza viene talvolta implementata manualmente dall'operatore del sistema tramite interruttori on/off; negli altri casi viene utilizzato uno speciale relè elettromeccanico con temporizzatore incorporato. Certamente, né un controllo manuale né una soluzione basata su relè sono pratici o desiderabili per la maggior parte dei prodotti odierni, in particolare quelli destinati ai mercati di massa e ai consumatori medi.
Inizia dal livello fisico
In qualsiasi discussione sul sequenziamento dell'alimentazione, ci sono due aspetti da tenere a mente: il segnale di controllo proveniente dal sequenziatore e il corrispondente ingresso di controllo su ciascun DC regolatore.


Ovviamente, il sequenziatore deve avere un numero sufficiente di uscite di controllo e, in alcuni casi, anche prevedere l'espansione del numero, se necessario. Queste uscite sono semplici segnali di controllo a livello logico.
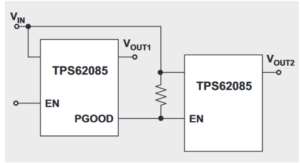
I regolatori CC complementari che stanno abilitando devono avere un ingresso di abilitazione pin singolo (EN) oppure l'utente deve aggiungere un interruttore elettronico (solitamente un MOSFET) tra l'uscita del regolatore e la barra di alimentazione fisica che guida, quindi controllare questo interruttore (Figure 2 ).
In genere è preferibile scegliere un regolatore CC dotato di un semplice controllo di abilitazione a livello logico, se disponibile, oppure selezionare PMIC, che può pilotare direttamente il MOSFET on/off della barra di alimentazione discreta con valori nominali di corrente/tensione adeguati e non necessita di un driver MOSFET separato.
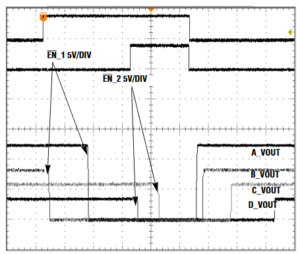
Nel caso più semplice di sequenziamento sequenziale, in cui ogni binario viene acceso in serie non appena un altro binario diventa “buono”, la soluzione è spesso semplice. Se ciascun regolatore del binario precedente dispone di un'uscita “power good” (PG) e il regolatore successivo dispone di un ingresso di controllo Abilita, l'indicatore PG è collegato all'ingresso EN. Quando il primo regolatore segnala PG, accende automaticamente quello successivo, e così via su tutta la linea come una sorta di effetto a catena “a margherita” (Figure 3 ).

Questo approccio funzionerà per qualsiasi numero di regolatori DC in serie, ma questa virtù è anche il suo limite: devono avere uno schema sequenziale (sebbene un PG possa essere collegato a più di un EN) e c'è poca flessibilità. Inoltre, questo approccio non può controllare i tempi in cui un alimentatore deve attendere un intervallo di tempo specificato prima di accendersi, e non può gestire la sequenza di spegnimento, che potrebbe essere importante quanto l'accensione.
Per superare alcuni di questi problemi, è possibile utilizzare un circuito integrato di ripristino con controllo timer per la sequenza di accensione. Il venerabile e versatile IC timer 555 (o variante più recente) può essere utilizzato per controllare il sequenziamento invocando un periodo di tempo dopo che la prima rotaia raggiunge il valore della finestra nominale o dopo lo spegnimento di una rotaia. Il periodo di tempo viene impostato nell'hardware dall'utente utilizzando i resistori con il 555, quindi è stabilito dalla progettazione e dalla distinta base, non dal firmware (Figure 4 ). Sebbene questo possa non sembrare un approccio elegante, è efficace, particolarmente utile quando un problema di sequenziamento diventa visibile solo dopo che la progettazione è stata completata e le schede prototipo vengono valutate (sì, succede).


Per i sistemi con più binari e che necessitano di maggiore flessibilità, è possibile utilizzare un PMIC come MAX16029 di Analog Devices/Maxim Integrated per quattro canali, con il periodo di ritardo programmato dall'utente tramite condensatori, evitando così volatilità della memoria o problemi di avvio (Figure 5 ).


Ciascuno dei quattro canali è indipendente dagli altri e l'uscita di ciascun canale può essere utilizzata in una configurazione a drain aperto che supporta tensioni rail fino a 28 V, necessarie per i regolatori CC di gamma superiore. Altri PMIC con questa funzionalità hanno la temporizzazione impostata tramite un'interfaccia PMBus anziché condensatori o resistori e quindi possono essere collegati a margherita per gestire più di quattro binari.
La parte successiva di questo articolo esamina le soluzioni di sequenziamento di fascia alta e i loro attributi.
Contenuti correlati di EE World
Se stai progettando circuiti integrati di potenza, ecco alcuni strumenti da considerare|
Scelta e applicazione degli alimentatori programmabili
Il dispositivo consente il sequenziamento a prova di errore dei binari di alimentazione FPGA
I circuiti integrati di supervisione risolvono i problemi legati ai glitch all'accensione, parte 1
I circuiti integrati di supervisione risolvono i problemi legati ai glitch all'accensione, parte 2
Riferimenti esterni
Texas Instruments, "Sequenziamento dell'alimentazione per FPGA"
Analog Devices, "Sequenziamento dell'alimentazione semplificato"
Analog Devices, “Sequenziamento complesso degli alimentatori reso semplice”.
Advanced Micro Devices, Inc., "Sequenziamento di potenza semplificato"
Microchip Tecnologia, Inc., "Perché è necessario il sequenziamento dell'alimentazione?"