Luftbetriebener Computerspeicher zur Steuerung von Soft-Robotern

Ingenieure von UC Riverside haben einen luftbetriebenen Computerspeicher entwickelt, der zur Steuerung von Softrobotern verwendet werden kann.
Die in der Open-Access-Zeitschrift veröffentlichte Arbeit PLOS One, sieht vor, eines der größten Hindernisse für die Weiterentwicklung der Soft-Robotik zu überwinden, nämlich das Missverhältnis zwischen Pneumatik und Elektronik.
Pneumatische Softroboter verwenden Druckluft, um weiche, gummiartige Gliedmaßen und Greifer zu bewegen und bieten nicht nur eine überlegene Leistung gegenüber herkömmlichen starren Robotern, wenn es um heikle Aufgaben geht, sondern sind für den Menschen viel sicherer in der Nähe – insbesondere wenn es um die Arbeit mit Cobots geht .
Gegenwärtig verwenden pneumatische Soft-Roboter noch elektronische Ventile und Computer, um die Position der beweglichen Teile des Roboters beizubehalten, was bei Soft-Robotern erhebliche Kosten-, Größen- und Leistungsanforderungen verursachen kann, was ihre Durchführbarkeit einschränkt.
Als Reaktion darauf hat ein Team unter der Leitung des Bioingenieur-Doktoranden Shane Hoang, seines Beraters, des Bioingenieur-Professors William Grover, des Informatik-Professors Philip Brisk und des Maschinenbau-Professors Konstantinos Karydis ein pneumatisches logisches „Gedächtnis“ für einen weichen Roboter entwickelt, das die Elektronik eliminiert Speicher, der derzeit für diesen Zweck verwendet wird.
In der pneumatischen Logik fließt Luft, nicht Strom, durch Kreise oder Kanäle, und Luftdruck wird verwendet, um ein/aus oder wahr/falsch darzustellen. In modernen Computern werden diese logischen Zustände durch 1 und 0 im Code dargestellt, um elektrische Ladungen auszulösen oder zu beenden.
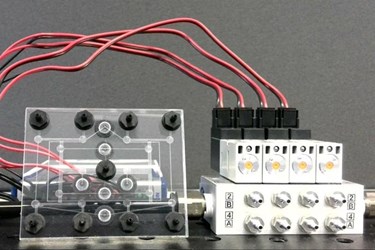
Die Forscher stellten ihren pneumatischen Direktzugriffsspeicher oder RAM-Chip mit Mikrofluidikventilen anstelle von elektronischen Transistoren her. Ursprünglich entwickelt, um den Flüssigkeitsfluss auf Mikrofluidik-Chips zu steuern, können diese Ventile auch den Luftfluss steuern.
Die Ventile bleiben gegen Druckdifferenzen abgedichtet, selbst wenn sie von einer Luftversorgungsleitung getrennt sind, wodurch eingeschlossene Druckdifferenzen erzeugt werden, die als Speicher fungieren und die Zustände der Aktoren eines Roboters aufrechterhalten. Dichte Anordnungen dieser Ventile können fortschrittliche Operationen ausführen und die teure, sperrige und energieverbrauchende elektronische Hardware reduzieren, die typischerweise zur Steuerung pneumatischer Roboter verwendet wird.
Nach der Modifikation der Mikrofluidikventile, um größere Luftdurchsätze zu bewältigen, produzierte das Team einen pneumatischen 8-Bit-RAM-Chip, der größere und sich schneller bewegende weiche Roboter steuern kann, und integrierte ihn in ein Paar 3D-gedruckte Gummihände. Der pneumatische RAM verwendet atmosphärische Luft, um einen Wert von „0“ oder FALSCH darzustellen, und Vakuum, um einen Wert von „1“ oder WAHR darzustellen. Die weichen Roboterfinger werden gestreckt, wenn sie mit Atmosphärendruck verbunden sind, und zusammengezogen, wenn sie mit Vakuum verbunden sind.
Theoretisch könnten mit diesem System auch andere Roboter ohne elektronische Hardware und nur eine batteriebetriebene Pumpe zur Vakuumerzeugung betrieben werden. Die Forscher stellten fest, dass ohne positiven Druck irgendwo im System – nur normaler atmosphärischer Luftdruck – keine Gefahr einer versehentlichen Überdruckbeaufschlagung und eines gewaltsamen Ausfalls des Roboters oder seines Steuerungssystems besteht.
Roboter nutzen dies Technologie wäre besonders sicher für den empfindlichen Gebrauch am oder in der Nähe von Menschen, wie beispielsweise tragbare Geräte für Säuglinge mit motorischen Beeinträchtigungen.