소프트 로봇을 제어하는 공기 구동 컴퓨터 메모리

UC Riverside의 엔지니어들은 소프트 로봇을 제어하는 데 사용할 수 있는 공기 구동 컴퓨터 메모리를 개발했습니다.
오픈액세스 저널에 발표된 이 연구는 플로스 원, 공압과 전자의 불일치인 소프트 로봇 공학 발전의 가장 큰 장애물 중 하나를 극복하고자 합니다.
공압식 소프트 로봇은 압축 공기를 사용하여 부드럽고 고무 같은 팔다리와 그리퍼를 움직이며 섬세한 작업을 수행할 때 기존의 딱딱한 로봇보다 우수한 성능을 제공할 뿐만 아니라 인간에게는 특히 협동로봇과 함께 작업할 때 훨씬 더 안전합니다. .
현재 공압 소프트 로봇은 여전히 전자 밸브와 컴퓨터를 사용하여 로봇의 움직이는 부품의 위치를 유지하므로 소프트 로봇에 상당한 비용, 크기 및 전력 요구를 추가하여 실현 가능성을 제한할 수 있습니다.
이에 대한 응답으로 생명공학 박사과정 학생인 Shane Hoang, 그의 고문, 생명공학 교수인 William Grover, 컴퓨터 과학 교수인 Philip Brisk, 기계 공학 교수인 Konstantinos Karydis가 이끄는 팀은 전자 장치를 제거하는 소프트 로봇을 위한 공압 논리 "메모리"를 개발했습니다. 현재 해당 용도로 사용되는 메모리입니다.
공압 논리에서 전기가 아닌 공기는 회로 또는 채널을 통해 흐르고 공기 압력은 켜짐/꺼짐 또는 참/거짓을 나타내는 데 사용됩니다. 최신 컴퓨터에서 이러한 논리적 상태는 코드에서 1과 0으로 표시되어 전하를 유발하거나 종료합니다.
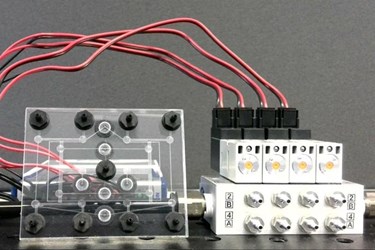
연구원들은 전자 트랜지스터 대신 미세 유체 밸브를 사용하여 공압 랜덤 액세스 메모리 또는 RAM 칩을 만들었습니다. 원래 미세 유체 칩의 액체 흐름을 제어하도록 설계된 이 밸브는 공기 흐름도 제어할 수 있습니다.
밸브는 공기 공급 라인에서 분리된 경우에도 차압에 대해 밀봉된 상태를 유지하여 메모리 역할을 하고 로봇 액추에이터의 상태를 유지하는 트랩된 차압을 생성합니다. 이러한 밸브의 조밀한 어레이는 고급 작업을 수행하고 일반적으로 공압 로봇을 제어하는 데 사용되는 비싸고 부피가 크며 전력을 소모하는 전자 하드웨어를 줄일 수 있습니다.
더 큰 공기 흐름을 처리하기 위해 미세 유체 밸브를 수정한 후 팀은 더 크고 빠르게 움직이는 소프트 로봇을 제어할 수 있는 8비트 공압 RAM 칩을 생산하고 3D 인쇄 고무 손 한 쌍에 통합했습니다. 공압식 RAM은 대기압 공기를 사용하여 "0" 또는 FALSE 값을 나타내고 진공을 사용하여 "1" 또는 TRUE 값을 나타냅니다. 부드러운 로봇 핑거는 대기압에 연결되면 확장되고 진공에 연결되면 수축됩니다.
이론적으로 이 시스템은 전자 하드웨어 없이 다른 로봇을 작동하는 데 사용할 수 있으며 진공을 생성하기 위해 배터리로 구동되는 펌프만 사용할 수 있습니다. 연구원들은 시스템의 어느 곳에도 양압이 없으면(정상 대기압만) 로봇이나 제어 시스템의 우발적인 과압 및 폭력적인 고장의 위험이 없다고 지적했습니다.
이를 이용한 로봇 technology 운동 장애가 있는 유아용 웨어러블 장치와 같이 사람 위나 주위에서 섬세한 사용에 특히 안전합니다.