หน่วยความจำคอมพิวเตอร์ขับเคลื่อนด้วยอากาศเพื่อควบคุมหุ่นยนต์อ่อน

วิศวกรของ UC Riverside ได้พัฒนาหน่วยความจำคอมพิวเตอร์ที่ขับเคลื่อนด้วยอากาศ ซึ่งสามารถใช้ควบคุมหุ่นยนต์แบบนิ่มได้
ผลงานที่ตีพิมพ์ในวารสาร open-access PLOS หนึ่ง ดูเหมือนจะเอาชนะอุปสรรคที่ใหญ่ที่สุดในการพัฒนาหุ่นยนต์แบบนิ่มซึ่งเป็นความไม่ตรงกันระหว่างระบบนิวเมติกและอิเล็กทรอนิกส์
หุ่นยนต์ซอฟต์โรบอทแบบใช้ลมใช้อากาศอัดแรงดันเพื่อเคลื่อนแขนขาและกริปเปอร์ที่อ่อนนุ่มและเป็นยาง และไม่เพียงแต่ให้ประสิทธิภาพที่เหนือกว่าสำหรับหุ่นยนต์แข็งแบบเดิมเท่านั้นเมื่อต้องปฏิบัติงานที่ละเอียดอ่อน แต่สำหรับมนุษย์นั้นปลอดภัยกว่าเมื่อต้องอยู่ใกล้ๆ โดยเฉพาะอย่างยิ่งเมื่อต้องทำงานร่วมกับโคบอท .
ในปัจจุบัน หุ่นยนต์นิ่มแบบใช้ลมยังคงใช้วาล์วอิเล็กทรอนิกส์และคอมพิวเตอร์เพื่อรักษาตำแหน่งของชิ้นส่วนที่เคลื่อนไหวของหุ่นยนต์ ซึ่งสามารถเพิ่มต้นทุน ขนาด และความต้องการพลังงานให้กับหุ่นยนต์แบบนิ่มได้อย่างมาก ซึ่งจำกัดความเป็นไปได้ของพวกมัน
ในการตอบสนอง ทีมงานที่นำโดยนักศึกษาปริญญาเอกสาขาวิศวกรรมชีวภาพ Shane Hoang ที่ปรึกษา ศาสตราจารย์ William Grover วิศวกรรมชีวภาพ ศาสตราจารย์ด้านวิทยาการคอมพิวเตอร์ Philip Brisk และศาสตราจารย์ด้านวิศวกรรมเครื่องกล Konstantinos Karydis ได้พัฒนา "หน่วยความจำ" ลอจิกนิวเมติกสำหรับหุ่นยนต์อ่อน หน่วยความจำที่ใช้อยู่ในปัจจุบันเพื่อการนั้น
ในตรรกะของนิวแมติก อากาศ ไม่ใช่ไฟฟ้า ไหลผ่านวงจรหรือช่องสัญญาณ และความดันอากาศถูกใช้เพื่อแสดงการเปิด/ปิดหรือจริง/เท็จ ในคอมพิวเตอร์สมัยใหม่ สถานะทางลอจิคัลเหล่านี้จะแสดงด้วย 1 และ 0 ในรหัสเพื่อกระตุ้นหรือยุติประจุไฟฟ้า
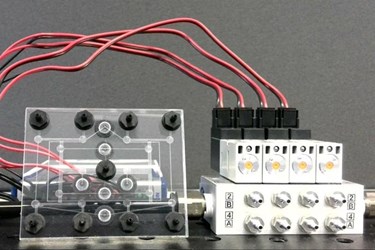
นักวิจัยได้สร้างหน่วยความจำเข้าถึงโดยสุ่มแบบนิวแมติกหรือ RAM ชิปโดยใช้วาล์วไมโครฟลูอิดิกแทนทรานซิสเตอร์อิเล็กทรอนิกส์ แต่เดิมออกแบบมาเพื่อควบคุมการไหลของของเหลวบนชิปไมโครฟลูอิดิก วาล์วเหล่านี้สามารถควบคุมการไหลของอากาศได้เช่นกัน
วาล์วยังคงปิดสนิทกับส่วนต่างของแรงดันแม้ว่าจะไม่ได้เชื่อมต่อจากท่อจ่ายอากาศ ซึ่งสร้างความแตกต่างของแรงดันที่ติดอยู่ซึ่งทำหน้าที่เป็นหน่วยความจำและรักษาสถานะของแอคทูเอเตอร์ของหุ่นยนต์ อาร์เรย์ที่หนาแน่นของวาล์วเหล่านี้สามารถดำเนินการขั้นสูง และลดฮาร์ดแวร์อิเล็กทรอนิกส์ที่มีราคาแพง เทอะทะ และใช้พลังงานมาก ซึ่งโดยทั่วไปแล้วจะใช้ในการควบคุมหุ่นยนต์นิวเมติก
หลังจากปรับเปลี่ยนวาล์วไมโครฟลูอิดิกเพื่อรองรับอัตราการไหลของอากาศที่มากขึ้น ทีมงานได้ผลิตชิป RAM แบบนิวเมติก 8 บิตที่สามารถควบคุมหุ่นยนต์นิ่มขนาดใหญ่และเคลื่อนที่เร็วขึ้น และรวมเข้ากับมือยางพิมพ์ 3 มิติ แรมแบบนิวแมติกใช้อากาศที่มีความดันบรรยากาศเพื่อแสดงค่า "0" หรือ FALSE และใช้สุญญากาศเพื่อแทนค่า "1" หรือ TRUE นิ้วของหุ่นยนต์แบบนิ่มจะขยายออกเมื่อเชื่อมต่อกับความดันบรรยากาศและหดตัวเมื่อเชื่อมต่อกับสุญญากาศ
ตามทฤษฎีแล้ว ระบบนี้สามารถใช้ควบคุมหุ่นยนต์ตัวอื่นๆ ได้โดยไม่ต้องใช้ฮาร์ดแวร์อิเล็กทรอนิกส์ใดๆ และมีเพียงปั๊มที่ใช้พลังงานจากแบตเตอรี่เท่านั้นเพื่อสร้างสุญญากาศ นักวิจัยตั้งข้อสังเกตว่าหากไม่มีแรงดันบวกใดๆ ในระบบ มีเพียงความดันอากาศในบรรยากาศปกติเท่านั้น ไม่มีความเสี่ยงที่แรงดันเกินโดยไม่ได้ตั้งใจและความล้มเหลวอย่างรุนแรงของหุ่นยนต์หรือระบบควบคุม
หุ่นยนต์ใช้สิ่งนี้ เทคโนโลยี จะปลอดภัยเป็นพิเศษสำหรับการใช้งานที่ละเอียดอ่อนบนหรือรอบตัวมนุษย์ เช่น อุปกรณ์สวมใส่ได้สำหรับทารกที่มีความบกพร่องทางการเคลื่อนไหว