Yumuşak robotları kontrol etmek için havayla çalışan bilgisayar belleği

UC Riverside'daki mühendisler, yumuşak robotları kontrol etmek için kullanılabilecek, havayla çalışan bir bilgisayar belleği geliştirdi.
Açık erişimli dergide yayınlanan çalışma, PLOS Bir, Yumuşak robot teknolojisinin ilerlemesinin önündeki en büyük engellerden biri olan pnömatik ve elektronik arasındaki uyumsuzluğun üstesinden gelmeye çalışıyor.
Pnömatik yumuşak robotlar, yumuşak, lastiksi uzuvları ve kavrayıcıları hareket ettirmek için basınçlı hava kullanır ve yalnızca hassas görevlerin yerine getirilmesi söz konusu olduğunda geleneksel sert robotlara göre üstün bir performans sunmakla kalmaz, aynı zamanda insanlar için etrafta olmak çok daha güvenlidir; özellikle konu cobot'larla birlikte çalışırken. .
Şu anda pnömatik yumuşak robotlar, robotun hareketli parçalarının konumunu korumak için hala elektronik valfler ve bilgisayarlar kullanıyor; bu da, yumuşak robotlara önemli ölçüde maliyet, boyut ve güç talebi ekleyerek fizibilitelerini sınırlayabiliyor.
Buna yanıt olarak, biyomühendislik doktora öğrencisi Shane Hoang, danışmanı, biyomühendislik profesörü William Grover, bilgisayar bilimi profesörü Philip Brisk ve makine mühendisliği profesörü Konstantinos Karydis liderliğindeki bir ekip, yumuşak bir robot için elektronik devreyi ortadan kaldıran bir pnömatik mantık "belleği" geliştirdi. şu anda bu amaç için kullanılan bellek.
Pnömatik mantıkta, devreler veya kanallar boyunca elektrik değil hava akar ve açık/kapalı veya doğru/yanlışı temsil etmek için hava basıncı kullanılır. Modern bilgisayarlarda bu mantıksal durumlar, elektrik yüklerini tetiklemek veya sonlandırmak için kodda 1 ve 0 ile temsil edilir.
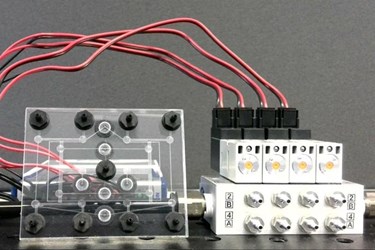
Araştırmacılar pnömatik rastgele erişimli belleklerini veya RAM çiplerini elektronik transistörler yerine mikroakışkan valfler kullanarak yaptılar. Başlangıçta mikroakışkan çipler üzerindeki sıvı akışını kontrol etmek için tasarlanan bu valfler aynı zamanda hava akışını da kontrol edebilir.
Valfler, hava besleme hattıyla bağlantısı kesildiğinde bile bir basınç farkına karşı kapalı kalır, hafıza olarak işlev gören ve robotun aktüatörlerinin durumlarını koruyan sıkışmış basınç diferansiyelleri oluşturur. Bu valflerin yoğun dizilimi gelişmiş işlemleri gerçekleştirebilir ve genellikle pnömatik robotları kontrol etmek için kullanılan pahalı, hantal ve güç tüketen elektronik donanımları azaltabilir.
Ekip, mikroakışkan valfleri daha büyük hava akış hızlarını idare edecek şekilde değiştirdikten sonra, daha büyük ve daha hızlı hareket eden yumuşak robotları kontrol edebilen 8 bitlik bir pnömatik RAM çipi üretti ve bunu bir çift 3D baskılı lastik ele dahil etti. Pnömatik RAM, "0" veya YANLIŞ değerini temsil etmek için atmosferik basınçlı havayı ve "1" veya DOĞRU değerini temsil etmek için vakumu kullanır. Yumuşak robotik parmaklar, atmosferik basınca bağlandığında uzar ve vakuma bağlandığında büzülür.
Teorik olarak bu sistem, herhangi bir elektronik donanım olmadan diğer robotları çalıştırmak ve yalnızca pille çalışan bir pompayla vakum oluşturmak için kullanılabilir. Araştırmacılar, sistemin herhangi bir yerinde pozitif basınç (sadece normal atmosferik hava basıncı) olmadığında, kazara aşırı basınç oluşması veya robotun veya kontrol sisteminin şiddetli bir şekilde arızalanması riskinin bulunmadığını belirtti.
Bunu kullanan robotlar teknoloji motor bozukluğu olan bebeklere yönelik giyilebilir cihazlar gibi, insanların üzerinde veya çevresinde hassas kullanım için özellikle güvenli olacaktır.