Die Elektrifizierungsrate der Mobilität in Industrie oder Verkehr hängt vom Einsatz der Ladeinfrastruktur ab. Die vorhandene Lösung, nämlich das leitende Laden, weist aufgrund des Einsteckens großer Kabel, insbesondere für eine höhere Leistung, mehrere Bedenken hinsichtlich Sicherheit, Robustheit und Komfort auf. Das kabellose Laden wird angepriesen, um eine sichere, saubere und autonome Lösung zu bieten.
Was ist drahtlose und induktive Energieübertragung (IPT)?
Der Wissenschaftler Nikola Tesla prägte den Begriff „Wireless Power Transfer“ (WPT) und stellte 1893 ein kontaktloses System vor. Die Grundprinzipien, die dies regeln Technologie sind das Lenzsche Gesetz und das Induktionsgesetz von Michael Faraday. Es gibt viele Methoden, mit denen dies genutzt werden kann. Am erfolgreichsten kommerzialisiert (bei niedrigen Leistungsstufen) ist die „Induktive Energieübertragung“ (IPT). IPT nutzt Nahfeld Technologie wobei die Energie in einem kleinen Bereich des Senders verbleibt.
Finepower entwickelt seit mehreren Jahren Lösungen für die drahtlose (induktive) Energieübertragung. Jetzt erweitern wir diese Technologie auf den bidirektionalen Betrieb in Verbindung mit hoher Leistung und geringem Stromverbrauch Spannung Batterien im Forschungsprojekt BiLiA, das vom Bayerischen Wirtschaftsministerium und der Projektdurchführungsorganisation VDI-VDE-I finanziert wird.
IPT-Magnetspulensystem
Die magnetische Kopplungsstufe ist der wichtigste Teil, der über das Design der Leistungselektronik, den Wirkungsgrad und die übertragbare Leistung entscheidet. In einer typischen Anwendung als Laden von Elektrofahrzeugen ist die sekundärseitige Spule an der Unterseite des Fahrzeugs angebracht. Die Primärspulenseite wird auf den Boden gelegt. Diese Anordnung wird durch Verwendung von Ferrit und zwischen diesen beiden Spulen mit Flussmittel versehen Aluminium an den Außenseiten jeder Spule. Das Stapeln oder Formen der Ferritblöcke ist ebenfalls möglich. Der Luftspalt zwischen den Spulen kann je nach Bodenfreiheit des Fahrzeugs sehr groß sein. Dies führt zu einer Streuinduktivität mit ähnlichen Abmessungen wie die Gegeninduktivität. Jede Spule im IPT-System kann kreisförmige, rechteckige, Magnet-, DD-, DDQ-, bipolare usw. Formen haben. Die Vorteile jedes Spulensystems variieren je nach Interoperabilität, Größe, Flussleckage, Positionstoleranzen und Betriebskomplexität. Bei höheren Leistungen wird zur Reduzierung der Amperewindungen (oder der magnetomotorischen Kraft) eine bifilare Wicklung verwendet. Die Effizienz des gesamten IPT-Systems wird durch den nativen Qualitätsfaktor der Spulen begrenzt. Dies kann durch Verwendung eines Litzendrahtes erhöht werden, der die Haut- und Näherungsverluste sowohl auf Bündel- als auch auf Strangniveau sorgfältig reduziert.

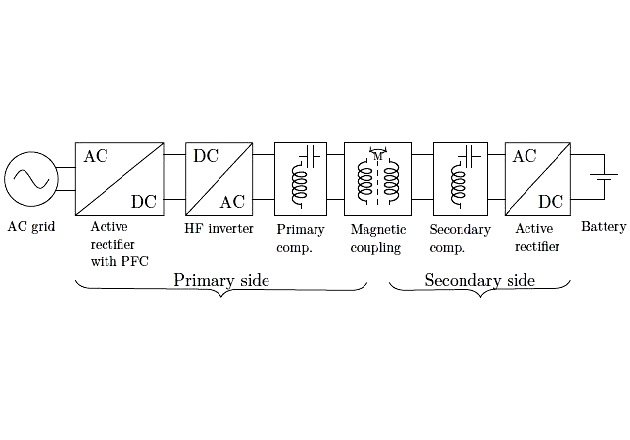
Abbildung 1: Blockschaltbild einer typischen induktiven Ladestation. Der Netzstrom wird gleichgerichtet und mithilfe von PFC bzw. Wechselrichter in ein Hochfrequenzsignal umgewandelt. Dieses hochfrequente Stromsignal durch die Primärspule erzeugt einen Fluss. Dadurch wird ein Spannung über die Sekundarstufe. Das Signal wird später gleichgerichtet, um eine Gleichstrombatterie mit Strom zu versorgen.
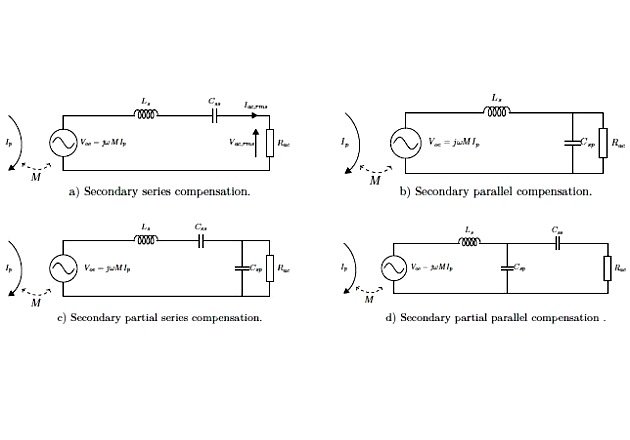
Abbildung 2: a) Auf der Sekundärseite wird ein Serienkondensator Css hinzugefügt. Ein richtig gewählter Wert kann die Sekundärinduktivität (ωLs) aufheben und so die Leistungsübertragung verbessern. Die von Voc wahrgenommene Impedanz ist bei dieser Frequenz rein ohmsch. Dies wird normalerweise konstant verwendet Spannung Anwendungen. b) Ein Parallelkondensator, der den Serienkondensator ersetzt, ist bei Konstantstromanwendungen nützlich. c+d) Hybrider Kompensationstyp mit Reihen- und Parallelkompensation Kondensatoren einstellbar sind ebenfalls möglich.
Resonanz optimieren Schaltung Maximiert die Effizienz
Das vereinfachte Modell eines typischen induktiven Ladesystems ist in Abbildung 1 dargestellt. Ein Hochfrequenz-Wechselrichter (dh 80–90 kHz) wandelt nach einem PFC das gleichgerichtete Netz um Spannung in eine Wechselstrom-Rechteckwelle umgewandelt, die für eine effektive Leistungsübertragung erforderlich ist.
Dieser hochfrequente Strom durch die Primärspule erzeugt einen Fluss, der a induziert Spannung über die Sekundärseite. Das Spannung heißt offen-Schaltung Spannung (Voc), gegeben durch Gleichung 1, wobei Ip der Primärspulenstrom, M die Gegeninduktivität und ω die Winkelfrequenz ist.
Voc = jωMIp
Voc liefert, wenn es an eine Last angeschlossen ist, Leistung und ist durch Gleichung 2 gegeben, wobei Rac der äquivalente Lastwiderstand ist (die Impedanz, die der aktive Gleichrichter und die Last an die Sekundärseite liefern.) Ls ist die Sekundärinduktivität.
P_ {out} = frac {V_ {2} ^ {oc} R_ {ac}} {R_ {2} ^ {ac} + (Omega ^ {2} L_ {2} ^ {s})}
Unter Verwendung des maximalen Leistungsübertragungssatzes mit Gleichung 2 wird die maximale Ausgangsleistung bei Rac = ωLs erreicht. Eine Serie hinzufügen Kondensator in der Gleichung mit 1/ωC2 zur Streichung des Termes kann ωLs die maximal übertragbare Leistung verdoppeln. Anstelle einer Reihe sind aber auch andere Kompensationstopologien möglich. Dabei kann es sich um ein beliebiges T- (oder n-)Netzwerk handeln, das mit passiver Energiespeicherung aufgebaut ist Komponenten. Einige vereinfachte Tuning-Netzwerke auf der Sekundärseite sind in Abbildung 2 dargestellt.
Die Ausgangsleistung des Schaltung kann auch wie in Gleichung 3 geschrieben werden, wobei Isc der Strom der Sekundärseite unter Kurzschlussbedingungen und Q2 der Sekundärlastqualitätsfaktor ist.
P_ {out} = V_ {oc} I_ {sc} Q_ {2} = frac {omega M ^ {2}} {L_ {s}} I_ {2} ^ {p} Q_ {2}
Aus der Gleichung 3 kann der Strom der Primärspule durch Erhöhen von Q2 verringert werden und somit die Verluste verringert werden. Die Bandbreite des Systems wird jedoch verringert, was die Implementierung des Steuerungssystems schwieriger macht. Die erforderliche Volt-Ampere-Nennleistung der Sekundärspule erhöht sich ebenfalls.
Bidirektionaler Stromfluss reduziert die Netzkosten
Um die Treibhausgasemissionen zu reduzieren, gibt es einen starken Schub in Richtung erneuerbarer Energien. Vor allem Solar- und Windkraft. Sonnenlicht und Windströme treten jedoch nur zeitweise auf, und solche Schwankungen können das Netz destabilisieren. Um Energieunabhängigkeit zu erreichen, installieren viele Branchen ihre eigenen Systeme. Dies ist darauf zurückzuführen, dass der Zugang zu Technologien für erneuerbare Energien immer einfacher wird. Zum Beispiel würden Fahrzeugflottenbesitzer, die zur Elektrifizierung ihrer Fahrzeuge gefahren werden, von der (billigeren) Erzeugung ihres eigenen Stroms profitieren und daher Netzsysteme oder Ladestationen installieren. Andererseits könnte dies zu einem zunehmenden Bedarf an großem Landraum führen, um den Spitzenstrombedarf zu decken. Intelligente Netzspeichersysteme können jedoch die erforderliche Spitzenleistung reduzieren. Durch die Speicherung von Energie während der Spitzenverfügbarkeit und deren Bereitstellung bei Bedarf kann der Stromfluss gesteuert und der externe Bedarf aus dem Netz stabilisiert werden.
Elektrofahrzeugbatterien können aufgrund relativ großer Kapazitäten als ideale Energiespeicherelemente zur Netzstabilisierung angesehen werden. Daher sollten Batterieladegeräte einschließlich drahtloser Systeme verbessert werden, um einen bidirektionalen Betrieb zu ermöglichen.
Ein modifiziertes Modell des IPT-Systems mit bidirektionaler Funktionalität ist in Abbildung 3 dargestellt. Im Vorwärtsmodus fließt Strom vom Netz zu einer Batterieladung. Der Block nach dem PFC wirkt als Wechselrichter, der die Primärspule erregt. Ein Gleichrichter ist erforderlich, um den Wechselstrom von der Sekundärspule in eine Batterie umzuwandeln. Die jeweiligen Funktionen dieser Blöcke werden im umgekehrten Modus ausgetauscht. Die Wahl der Vergütungsart und ihrer Werte hängt von vielen Kriterien ab. Einige von ihnen werden unten diskutiert:
Kontrollierbarkeit: Die übliche Kontrollmethode ist die primäre Kontrolle. Diese Methode steuert die Ausgangsspannung des Hochfrequenz-Wechselrichters (HF) als Eingangsspannung der Primärspule. Gemäß der Gleichung 4 ist entweder eine Spannungssteuerung oder eine Phasensteuerung möglich. Dabei ist VDC die PFC-Ausgangsspannung und α der Phasenwinkel.
V_ {in, rms} = frac {2sqrt {2}} {pi} V_ {dc} cosfrac {alpha} {2}
Typische Spannungsübertragungsfunktionen einer S (erial) -S (erial) - und LC-LC-Kompensation Abb. 1.4. Die Spulenposition ist fest und liefert 1 kW und 5 kW. Die Diagramme zeigen sowohl den Vorwärts- als auch den Rückwärtsmodus. Der Lastqualitätsfaktor sollte nicht zu hoch sein, der erforderliche Betriebsbereich kann die Spezifikation des Wechselrichters überschreiten. Andererseits wird ein niedriger Qualitätsfaktor den verfügbaren Betriebsbereich nicht vollständig ausnutzen. Wie in der LC-LC-kompensierten Verstärkungsantwort zu sehen ist, ist die Variation der Verstärkung gering. Und bei der SS-Vorwärtsreaktion erfolgt die Polteilung bei höheren Leistungen. Dies erschwert den Aufbau des Steuerungssystems.
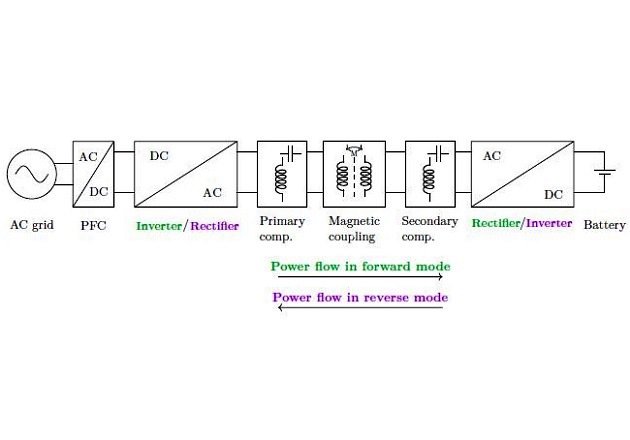
Abbildung 3: Das System ist in Abbildung 1 ausgerichtet, es ist jedoch ein Doppelbetrieb sowohl für DC-AC- als auch für AC-DC-Wandler möglich. Dies ermöglicht eine bidirektionale Energieübertragung.
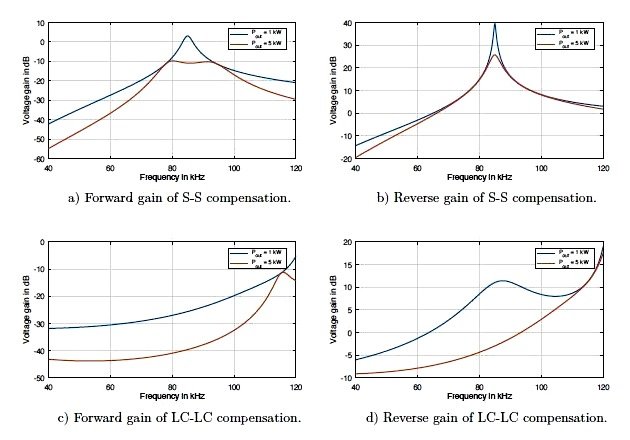
Abbildung 4: Wechselstrom kann in beiden Leistungsrichtungen eine Reaktion erhalten, die für SS- und LC-LC-Kompensationen aufgetragen ist. Beide sind auf 85 kHz eingestellt.
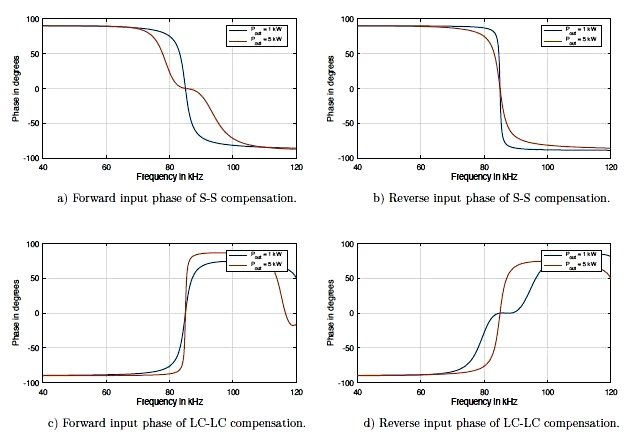
Abbildung 5: Eingangsphasenantwort zur Überprüfung der ZVS-Betriebsmöglichkeit in beiden Leistungsmodi
Die entsprechenden Eingangsphasenantworten sind in Abbildung 5 dargestellt. Die Phasenantwort beginnt im SS-Vorwärtsbereich (über den Betriebsbereich) abzuflachen, wodurch der verfügbare ZVS-Bereich begrenzt wird. Während im umgekehrten Modus die starken Änderungen aufgrund hoher Qualitätsfaktoren viel Blindleistung erfordern. Der gleiche Trend kann bei LC-LC beobachtet werden, jedoch mit vertauschten Antworten.
Einfachheit: Durch die Erweiterung der LC auf die Partialserie-Topologie LCC kann der Qualitätsfaktor verbessert werden, der für die Primärsteuerung geeignet ist. Dies erhöht jedoch die Kosten und die Komplexität aufgrund der hinzugefügten Komponenten. Auch die Verwendung der gleichen Art der Kompensation auf beiden Seiten behält die Symmetrie bei und kann den Konstruktionsaufwand verringern.
Reflektierte Impedanz: Die reaktive Komponente der reflektierten Impedanz bewirkt Resonanz. Bei der partiell parallelen Kompensation gibt es immer eine reaktive Komponente. Während sowohl die SS- als auch die LCC-LCC-Kompensation bei Betrieb unterhalb der Resonanz eine reflektierte Reaktanz von Null aufweisen würden (außer wenn zwischen den Spulen ein Versatz besteht). Wenn nicht sorgfältig vorgegangen wird, kann dies in einigen Szenarien das sanfte Einschalten der Transistoren einschränken und somit die Betriebseffizienz verringern. Adaptives Tuning kann helfen, dieses Problem zu beheben. Mit geeigneten Entwurfstechniken kann eine optimale Auswahl der Abstimmung erzielt werden, um den ZVS-Betrieb in beiden Modi über Positionen hinweg sicherzustellen.
Zusammenfassend ist es notwendig, alle Einschränkungen sowohl für den Vorwärts- als auch für den Rückwärtsbetriebsmodus ab dem Entwurfsstart eines bidirektionalen drahtlosen Ladesystems zu berücksichtigen. Die Leistung verschlechtert sich, wenn die Spulenparameter und das Abstimmsystem auf die gleiche Weise wie bei einem unidirektionalen Design ausgewählt werden. Daher ist ein Bottom-up-Ansatz erforderlich, um alle Anforderungen und Einschränkungen von Anfang an zusammenzustellen und das Magnetsystem unter Berücksichtigung der Kosten und Einschränkungen der Leistungselektronik zu optimieren.
Finepower erweitert kontinuierlich die technischen Einschränkungen des drahtlosen Ladens und unterstützt Kunden dabei, diese Technologie effizient in ihre jeweiligen Anwendungen zu implementieren.