Kadar elektrifikasi mobiliti dalam industri atau pengangkutan bergantung pada penggunaan infrastruktur pengisian. Penyelesaian yang ada, iaitu pengecasan konduktif, mempunyai beberapa masalah keselamatan, ketahanan, dan keselesaan kerana pemasangan kabel besar, terutama untuk daya yang lebih tinggi. Pengecasan tanpa wayar disebut untuk memberikan penyelesaian yang selamat, bersih, dan autonomi.
Apakah Pemindahan Kuasa Tanpa Wayar dan Induktif (IPT)?
Saintis Nikola Tesla mencipta istilah "Wireless Power Transfer" (WPT) dan mengemukakan sistem tanpa sentuh pada tahun 1893. Prinsip-prinsip asas yang mengatur ini teknologi ialah hukum Lenz dan hukum aruhan Michael Faraday. Terdapat banyak kaedah yang boleh digunakan. Yang paling berjaya dikomersialkan (pada tahap kuasa rendah) ialah "Pemindahan Kuasa Induktif" (IPT). IPT menggunakan medan dekat teknologi di mana tenaga kekal dalam kawasan kecil pemancar.
Finepower mengembangkan penyelesaian untuk pemindahan kuasa tanpa wayar (induktif) sejak beberapa tahun. Sekarang kita memperluas teknologi ini ke operasi dua arah bersamaan dengan daya tinggi, rendah voltan bateri dalam projek penyelidikan BiLiA yang dibiayai oleh Kementerian Ekonomi Bavaria dan organisasi pelaksanaan projek VDI-VDE-I.
Sistem Gegelung Magnetik IPT
Tahap gandingan magnetik adalah bahagian terpenting dalam menentukan reka bentuk elektronik kuasa, kecekapan, dan daya yang dapat dipindahtangankan. Dalam aplikasi khas sebagai pengisian kenderaan elektrik, gegelung sisi sekunder terpasang di sisi bawah kenderaan. Bahagian gegelung utama diletakkan di atas tanah. Pemasangan ini dipastikan mempunyai fluks di antara kedua gegelung tersebut dengan menggunakan ferit dan aluminium di bahagian luar setiap gegelung. Penumpukan atau pembentukan blok ferit juga mungkin. Jurang udara antara gegelung cukup besar, bergantung pada jarak tanah kenderaan. Ini membawa kepada kebocoran induktansi dimensi yang serupa dengan induktansi bersama. Setiap gegelung dalam sistem IPT boleh mempunyai bentuk bulat, segi empat tepat, solenoid, DD, DDQ, bipolar, dll. Kelebihan setiap sistem gegelung berbeza mengikut kebolehoperasian, ukuran, kebocoran fluks, toleransi kedudukan, dan kerumitan operasi. Pada kekuatan yang lebih tinggi, untuk mengurangkan putaran ampere (atau daya Magnetomotif) belitan berlainan digunakan. Kecekapan keseluruhan sistem IPT dibatasi oleh faktor kualiti asli gegelung. Ini dapat ditingkatkan dengan menggunakan wayar Litz dengan hati-hati mengurangkan kulit dan kerugian jarak pada tahap bundle dan helai.

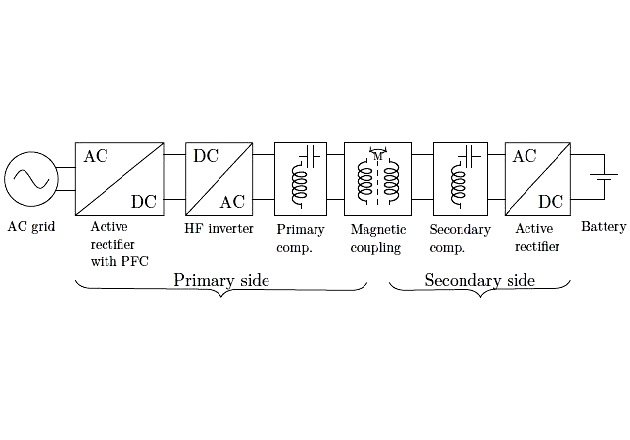
Rajah 1: Gambar rajah blok stesen pengecas induktif biasa. Kuasa grid dibetulkan dan ditukar kepada isyarat frekuensi tinggi menggunakan PFC dan penyongsang, masing-masing. Isyarat arus frekuensi tinggi ini melalui gegelung primer menghasilkan fluks. Oleh itu, mendorong a voltan merentasi menengah. Isyarat kemudiannya diperbetulkan untuk menghantar kuasa kepada beban bateri DC.
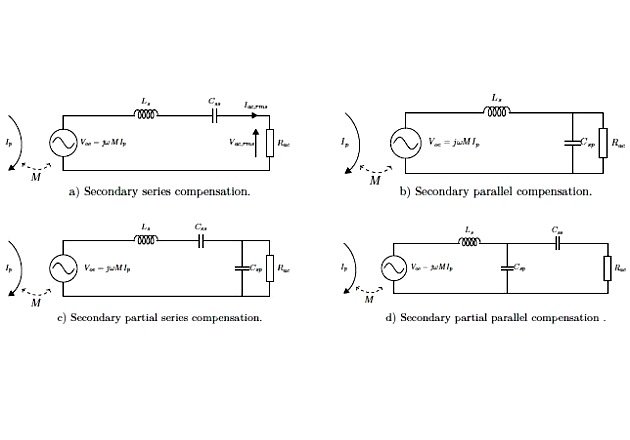
Rajah 2: a) Di bahagian kedua, satu kapasitor siri Css ditambah. Nilai yang dipilih dengan betul boleh membatalkan kearuhan sekunder (ωLs) untuk meningkatkan pemindahan kuasa. Impedans yang dilihat oleh Voc adalah rintangan semata-mata pada frekuensi ini. Ini biasanya digunakan dalam pemalar voltan aplikasi. b) Kapasitor selari yang menggantikan siri satu berguna dalam aplikasi arus malar. c+d) Jenis pampasan hibrid di mana siri dan selari Kapasitor boleh adjust pun boleh.
Mengoptimumkan Resonan litar Memaksimumkan Kecekapan
Model ringkas bagi sistem pengecasan induktif biasa ditunjukkan dalam Rajah 1. Penyongsang frekuensi tinggi (iaitu 80-90 kHz) selepas PFC menukar grid diperbetulkan voltan ke dalam gelombang persegi AC yang diperlukan untuk pemindahan kuasa yang berkesan.
Arus frekuensi tinggi ini melalui gegelung primer menghasilkan fluks mendorong a voltan merentasi sisi sekunder. ini voltan dipanggil terbuka-litar voltan (Voc), diberikan oleh Persamaan 1 di mana Ip ialah arus gegelung primer, M ialah kearuhan bersama dan, ω ialah frekuensi sudut.
Voc = jωMIp
Voc, apabila disambungkan ke beban memberikan daya dan diberikan oleh Persamaan 2 di mana Rac adalah rintangan beban setara (Impedans yang ditunjukkan oleh penerus aktif dan beban ke sisi sekunder.) Ls, adalah induktansi sekunder.
P_ {out} = frac {V_ {2} ^ {oc} R_ {ac}} {R_ {2} ^ {ac} + (omega ^ {2} L_ {2} ^ {s})}
Menggunakan teorem pemindahan kuasa maksimum dengan Persamaan 2, kuasa keluaran maksimum dicapai pada Rac = ωLs. Menambah siri kapasitor dalam persamaan dengan 1/ωC2 untuk membatalkan istilah ωLs boleh menggandakan kuasa boleh pindah maksimum. Tetapi bukannya satu siri, topologi pampasan lain yang berbeza juga mungkin. Mereka boleh menjadi mana-mana T (atau n) – rangkaian yang dibina menggunakan storan tenaga pasif komponen. Beberapa rangkaian penalaan yang dipermudahkan di sisi sekunder ditunjukkan pada Gambar 2.
Kuasa keluaran litar boleh juga ditulis seperti dalam Persamaan 3, di mana Isc ialah arus sisi sekunder di bawah keadaan litar pintas dan Q2 ialah faktor kualiti beban sekunder.
P_ {out} = V_ {oc} I_ {sc} Q_ {2} = frac {omega M ^ {2}} {L_ {s}} I_ {2} ^ {p} Q_ {2}
Dari Persamaan 3, cur-rent gegelung primer dapat dikurangkan dengan meningkatkan Q2 dan dengan itu, mengurangkan kerugian. Tetapi lebar jalur sistem akan dikurangkan, menjadikan pelaksanaan sistem kawalan lebih sukar. Peringkat volt-ampere yang diperlukan pada gegelung sekunder juga meningkat.
Aliran Daya Bidirectional Mengurangkan Kos Grid
Untuk mengurangkan pelepasan gas rumah hijau, terdapat dorongan kuat terhadap tenaga yang boleh diperbaharui. Tenaga suria dan angin yang paling ketara. Tetapi aliran cahaya matahari dan angin berselang-seling dan turun naik seperti itu dapat mengacaukan grid. Juga, dalam usaha bergantung pada tenaga, banyak industri memasang sistem mereka sendiri. Ini disebabkan oleh kemudahan akses teknologi tenaga boleh diperbaharui yang semakin meningkat. Sebagai contoh, pemilik armada kereta, yang didorong untuk menggerakkan elektrik kenderaan mereka akan mendapat keuntungan dari penjanaan (lebih murah) kuasa mereka sendiri dan oleh itu memasang sistem grid atau titik pengecasan. Di sisi lain, ini dapat menyebabkan peningkatan kebutuhan ruang darat yang besar untuk menutup permintaan daya puncak. Sistem penyimpanan grid pintar, bagaimanapun, dapat mengurangkan daya puncak yang diperlukan. Dengan menyimpan tenaga semasa ketersediaan puncak dan membekalkannya apabila diperlukan, aliran daya dapat dikendalikan dan permintaan luaran dari grid dapat distabilkan.
Oleh kerana kapasiti yang agak besar, bateri kenderaan elektrik dapat dilihat sebagai elemen penyimpanan tenaga yang ideal untuk penstabilan grid. Oleh itu, pengecas bateri termasuk sistem tanpa wayar, harus ditingkatkan untuk memberikan operasi dua arah.
Model modifikasi sistem IPT dengan fungsi dua arah ditunjukkan pada Gambar 3 Dalam mod maju, daya mengalir dari grid ke beban bateri. Blok selepas PFC berfungsi sebagai penyongsang yang mengasyikkan gegelung utama. Penyearah diperlukan untuk menukar kuasa AC dari gegelung sekunder ke bateri. Fungsi masing-masing blok ini akan ditukar, sementara dalam mod terbalik. Pilihan jenis pampasan dan nilainya bergantung pada banyak kriteria. Sebahagian daripada mereka dibincangkan di bawah:
Kebolehkendalian: Kaedah kawalan biasa adalah kawalan utama. Kaedah ini mengawal voltan output penyongsang frekuensi tinggi (HF) sebagai voltan input gegelung utama. Menurut Persamaan 4 boleh dilakukan kawalan voltan atau kawalan fasa. Di mana Vdc adalah voltan keluaran PFC dan α adalah sudut fasa.
V_ {in, rms} = frac {2sqrt {2}} {pi} V_ {dc} cosfrac {alpha} {2}
Fungsi pemindahan voltan khas bagi pampasan S (erial) -S (erial) dan LC-LC Rajah 1.4. Kedudukan gegelung tetap menghasilkan 1 kW dan 5 kW. Petak menunjukkan kedua-dua mod maju dan mundur. Faktor kualiti beban tidak boleh terlalu tinggi, jarak operasi yang diperlukan dapat melebihi spesifikasi penyongsang. Sebaliknya, faktor kualiti rendah tidak akan menggunakan sepenuhnya rangkaian operasi yang ada. Seperti yang dapat dilihat dalam tindak balas kenaikan kompensasi LC-LC, variasi kenaikan adalah rendah. Dan dalam tindak balas ke depan SS, pemisahan tiang berlaku pada kekuatan yang lebih tinggi. Ini menyukarkan reka bentuk sistem kawalan.
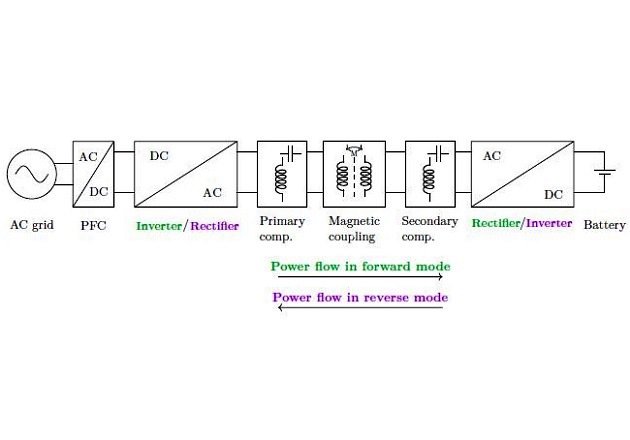
Gambar 3: Sistem ini sesuai pada Gambar 1, tetapi dengan dua operasi mungkin untuk kedua-dua penukar DC-AC dan AC-DC. Ini membolehkan pemindahan kuasa dua arah.
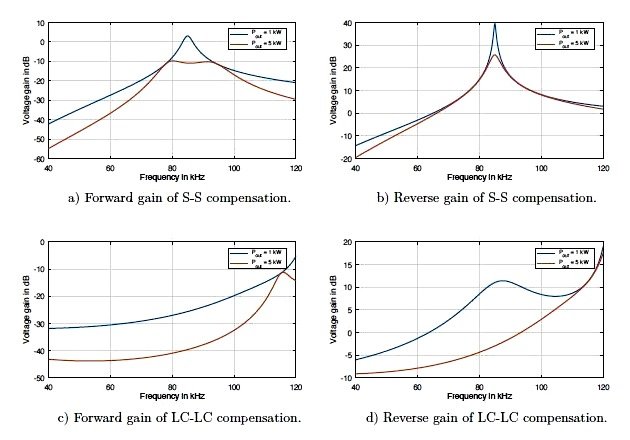
Gambar 4: AC dapat memperoleh tindak balas dalam kedua arah daya yang digambarkan untuk pampasan SS dan LC-LC. Kedua-duanya dihidupkan untuk beroperasi pada 85 kHz.
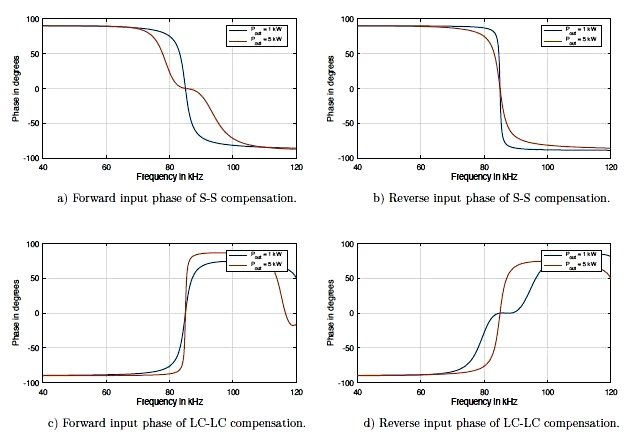
Gambar 5: Respons fasa input untuk memeriksa kemungkinan operasi ZVS dalam kedua-dua mod kuasa
Respons fasa input yang sesuai digambarkan dalam Gambar 5. Respons fasa mula meratakan (merentasi julat operasi) di SS maju, menghadkan jarak ZVS yang tersedia. Manakala dalam mod terbalik, perubahan tajam kerana faktor kualiti tinggi menuntut daya reaktif yang banyak. Trend yang sama dapat dilihat pada LC-LC, tetapi dengan tindak balas yang saling bertukar.
Kesederhanaan: Dengan memperluas LC ke LCC topologi separa, faktor kualiti dapat ditingkatkan yang sesuai dengan kawalan utama. Tetapi ia meningkatkan kos dan kerumitan kerana komponen tambahan. Juga menggunakan jenis pampasan yang sama di kedua-dua belah pihak mengekalkan simetri dan dapat mengurangkan usaha reka bentuk.
Impedans yang dicerminkan: Komponen reaktif impedans yang dipantulkan mempengaruhi resonans. Dalam pampasan separa-selari, selalu ada beberapa komponen reaktif. Manakala kompensasi SS dan LCC-LCC tidak mempunyai reaktansi pantulan ketika dikendalikan di bawah resonans (kecuali jika terdapat ofset antara gegelung). Sekiranya penjagaan tidak diambil, ini dapat mengehadkan kelembutan transistor dalam beberapa senario, sehingga mengurangkan kecekapan operasi. Penalaan adaptif dapat membantu mengatasi masalah ini. Dengan teknik reka bentuk yang tepat, pilihan penyesuaian yang optimum dapat diperoleh untuk memastikan operasi ZVS dalam kedua mod di semua posisi.
Untuk meringkaskannya, adalah perlu untuk mempertimbangkan semua kekangan untuk kedua-dua mod operasi maju dan mundur dari permulaan reka bentuk sistem pengecasan tanpa wayar dua arah. Prestasi akan merosot jika parameter gegelung dan sistem penalaan dipilih dengan cara yang sama seperti untuk reka bentuk satu arah. Oleh itu, pendekatan bottom-up diperlukan untuk menyusun semua keperluan dan kekangan dari awal untuk mengoptimumkan sistem magnet sambil mempertimbangkan kos dan batasan pada elektronik kuasa.
Finepower secara berterusan memperluas batasan teknikal pengecasan tanpa wayar dan menyokong pelanggan untuk menerapkan teknologi ini dengan berkesan ke dalam aplikasi masing-masing.