산업 또는 운송에서 이동성의 전기 화 속도는 충전 인프라의 배치에 따라 다릅니다. 기존 솔루션, 즉 전도성 충전은 특히 더 높은 전력을 위해 거대한 케이블을 연결하기 때문에 안전성, 견고성 및 편의성에 몇 가지 문제가 있습니다. 무선 충전은 안전하고 깨끗하며 자율적 인 솔루션을 제공하는 것으로 유명합니다.
무선 및 유도 전력 전송 (IPT)이란 무엇입니까?
과학자 Nikola Tesla는 "Wireless Power Transfer"(WPT)라는 용어를 만들어 1893 년에 비접촉식 시스템을 발표했습니다. technology 렌츠의 법칙과 마이클 패러데이의 유도 법칙이 있습니다. 이를 활용할 수 있는 방법은 다양합니다. (낮은 전력 수준에서) 가장 성공적으로 상용화된 것은 "유도 전력 전송"(IPT)입니다. IPT는 근거리장을 사용합니다. technology 여기서 에너지는 송신기의 작은 영역 내에 남아 있습니다.
Finepower는 수년 동안 무선 (유도 성) 전력 전송을위한 솔루션을 개발하고 있습니다. 이제 우리는이 기술을 고전력, 저전력과 함께 양방향 작동으로 확장하고 있습니다. 전압 바이에른 경제부와 프로젝트 실행 조직 VDI-VDE-I가 자금을 지원하는 연구 프로젝트 BiLiA의 배터리.
IPT 자기 코일 시스템
마그네틱 커플 링 단계는 전력 전자 장치, 효율성 및 전달 가능한 전력의 설계를 결정하는 가장 중요한 부분입니다. 전기 자동차 충전과 같은 일반적인 응용 분야에서 XNUMX 차측 코일은 차량의 바닥면에 부착됩니다. XNUMX 차 코일 측은 지상에 놓입니다. 이 어셈블리는 페라이트를 사용하여 두 코일 사이에 플럭스를 갖도록 보장합니다. 알루미늄 각 코일의 바깥쪽에. 페라이트 블록의 적층 또는 성형도 가능합니다. 코일 사이의 공극은 차량의 지상고에 따라 상당히 클 수 있습니다. 이것은 상호 인덕턴스와 비슷한 치수의 누설 인덕턴스로 이어집니다. IPT 시스템의 각 코일은 원형, 직사각형, 솔레노이드, DD, DDQ, 바이폴라 등의 모양을 가질 수 있습니다. 각 코일 시스템의 장점은 상호 운용성, 크기, 자속 누설, 위치 공차 및 운영 복잡성에 따라 다릅니다. 더 높은 전력에서는 암페어 회전 (또는 자기력)을 줄이기 위해 이중 섬유 권선이 사용됩니다. 전체 IPT 시스템의 효율성은 코일의 기본 품질 요소에 의해 제한됩니다. 이는 번들 및 가닥 수준 모두에서 피부 및 근접 손실을 조심스럽게 줄이는 Litz 와이어를 사용하여 증가시킬 수 있습니다.

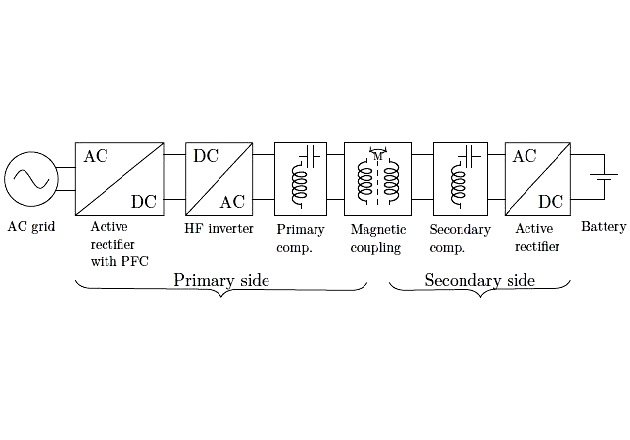
그림 1: 일반적인 유도 충전소의 블록 다이어그램. 그리드 전력은 정류되어 각각 PFC와 인버터를 사용하여 고주파 신호로 변환됩니다. XNUMX차 코일을 통한 이 고주파 전류 신호는 플럭스를 생성합니다. 이로써, 전압 보조에 걸쳐. 이 신호는 나중에 정류되어 DC 배터리 부하에 전력을 공급합니다.
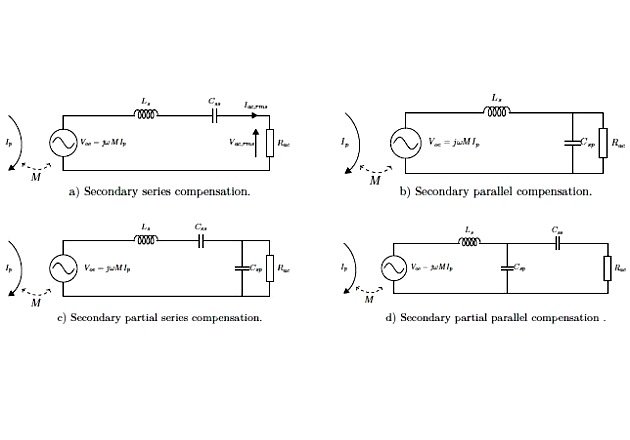
그림 2: a) XNUMX차측에는 직렬 커패시터 Css가 추가됩니다. 적절하게 선택된 값은 XNUMX차 인덕턴스(ωLs)를 취소하여 전력 전송을 개선할 수 있습니다. Voc에서 볼 수 있는 임피던스는 이 주파수에서 순전히 저항성입니다. 이것은 일반적으로 상수에서 사용됩니다. 전압 응용 프로그램. b) 직렬 커패시터를 대체하는 병렬 커패시터는 정전류 애플리케이션에 유용합니다. c+d) 직렬과 병렬이 혼합된 하이브리드 보상 유형 커패시터 조정도 가능합니다.
공명 최적화 회로 효율성 극대화
일반적인 유도 충전 시스템의 단순화된 모델은 그림 1에 나와 있습니다. PFC 후 고주파(예: 80-90kHz) 인버터는 정류된 그리드를 변환합니다. 전압 효과적인 전력 전송에 필요한 AC 구형파로 변환합니다.
XNUMX차 코일을 통과하는 이 고주파 전류는 플럭스를 생성합니다. 전압 XNUMX차측을 가로질러. 이것 전압 오픈이라고 합니다-회로 여기서 Ip는 1차 코일 전류, M은 상호 인덕턴스, ω는 각 주파수입니다.
Voc = jωMIP
Voc는 부하에 연결될 때 전력을 전달하며 식 2에 의해 주어집니다. 여기서 Rac는 등가 부하 저항입니다 (활성 정류기와 부하가 XNUMX 차 측에 제공하는 임피던스). Ls는 XNUMX 차 인덕턴스입니다.
P_ {out} = frac {V_ {2} ^ {oc} R_ {ac}} {R_ {2} ^ {ac} + (omega ^ {2} L_ {2} ^ {s})}
방정식 2의 최대 전력 전달 정리를 사용하면 최대 출력 전력은 Rac = ΩLs에서 달성됩니다. 시리즈 추가 콘덴서 1/ΩC2의 방정식에서 항을 취소하면 ΩL은 최대 전송 가능한 전력을 두 배로 늘릴 수 있습니다. 그러나 시리즈 대신에 다른 보상 토폴로지도 가능합니다. T(또는 n) – 수동 에너지 저장 장치를 사용하여 구축된 네트워크일 수 있습니다. 구성 요소들. 2 차측의 일부 단순화 된 조정 네트워크가 그림 XNUMX에 나와 있습니다.
의 출력 전력 회로 방정식 3과 같이 작성할 수도 있습니다. 여기서 Isc는 단락 상태에서 2차측의 전류이고 QXNUMX는 XNUMX차측 부하 품질 계수입니다.
P_ {out} = V_ {oc} I_ {sc} Q_ {2} = frac {omega M ^ {2}} {L_ {s}} I_ {2} ^ {p} Q_ {2}
수학 식 3에서 2 차 코일 전류는 QXNUMX를 증가시켜 감소 할 수 있으므로 손실을 줄일 수 있습니다. 그러나 시스템의 대역폭이 줄어들어 제어 시스템의 구현이 더 어려워집니다. XNUMX 차 코일의 필수 정격 전압도 증가합니다.
양방향 전력 흐름으로 그리드 비용 절감
온실 가스 배출을 줄이기 위해 재생 에너지를 향한 강력한 추진력이 있습니다. 가장 눈에 띄는 태양열 및 풍력. 그러나 햇빛과 바람의 흐름은 간헐적이며 이러한 변동으로 인해 그리드가 불안정해질 수 있습니다. 또한 에너지 자립을 추구하기 위해 많은 산업에서 자체 시스템을 설치하고 있습니다. 이는 재생 가능 에너지 기술에 대한 접근성이 점점 더 쉬워지기 때문입니다. 예를 들어 차량에 전기를 공급하기 위해 운전하는 차량 소유주는 자신의 전력을 (저렴한) 발전으로 인해 이익을 얻을 수 있으므로 그리드 시스템 또는 충전 지점을 설치할 수 있습니다. 다른 한편으로, 이것은 최대 전력 수요를 충당하기 위해 넓은 토지 공간의 필요성을 증가시킬 수 있습니다. 그러나 스마트 그리드 스토리지 시스템은 필요한 최대 전력을 줄일 수 있습니다. 최대 가용성 기간 동안 에너지를 저장하고 필요할 때 공급함으로써 전력 흐름을 관리하고 그리드의 외부 수요를 안정화 할 수 있습니다.
상대적으로 큰 용량으로 인해 전기 자동차 배터리는 그리드 안정화를위한 이상적인 에너지 저장 요소로 볼 수 있습니다. 따라서 무선 시스템을 포함한 배터리 충전기는 양방향 작동을 제공하도록 향상되어야합니다.
양방향 기능이있는 수정 된 IPT 시스템 모델이 그림 3에 나와 있습니다. 순방향 모드에서 전력은 그리드에서 배터리 부하로 흐릅니다. PFC 이후의 블록은 XNUMX 차 코일을 여자시키는 인버터 역할을합니다. XNUMX 차 코일의 AC 전력을 배터리로 변환하려면 정류기가 필요합니다. 이 블록의 각 기능은 역방향 모드에서 상호 교환됩니다. 보상 유형과 그 값의 선택은 여러 기준에 따라 다릅니다. 그중 일부는 아래에서 설명합니다.
제어 가능성 : 일반적인 제어 방법은 4 차 제어입니다. 이 방법은 고주파 (HF) 인버터 출력 전압을 XNUMX 차 코일 입력 전압으로 제어합니다. 방정식 XNUMX에 따르면 전압 제어 또는 위상 제어가 가능합니다. 여기서 Vdc는 PFC 출력 전압이고 α는 위상 각입니다.
V_ {in, rms} = frac {2sqrt {2}} {pi} V_ {dc} cosfrac {alpha} {2}
S (erial) -S (erial) 및 LC-LC 보상의 일반적인 전압 전달 함수 그림 1.4. 코일 위치는 고정되어 1kW 및 5kW를 제공합니다. 플롯은 정방향 및 역방향 모드를 모두 보여줍니다. 부하 품질 계수가 너무 높아서는 안되며 필요한 작동 범위는 인버터 사양을 초과 할 수 있습니다. 반면에 낮은 품질 요소는 사용 가능한 작동 범위를 완전히 활용하지 못합니다. LC-LC 보상 이득 응답에서 볼 수 있듯이 이득의 변동이 낮습니다. 그리고 SS 순방향 응답에서 극 분할은 더 높은 전력에서 발생합니다. 이것은 제어 시스템의 설계를 복잡하게합니다.
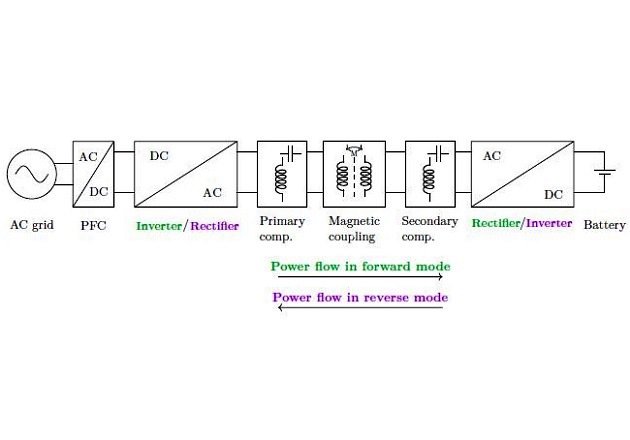
그림 3 : 시스템은 그림 1의 라인이지만 DC-AC 및 AC-DC 컨버터 모두에 대해 이중 작동이 가능합니다. 이를 통해 양방향 전력 전송이 가능합니다.
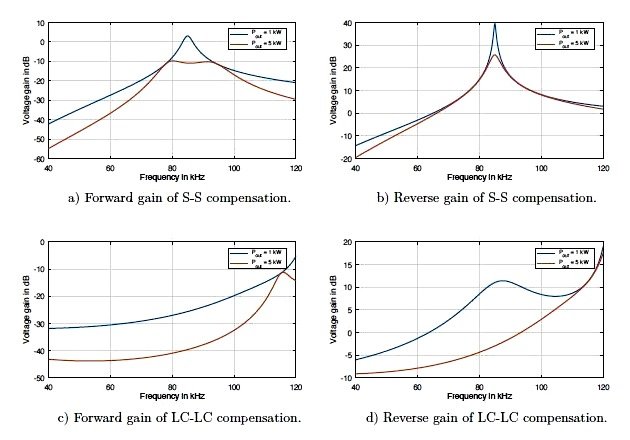
그림 4 : AC는 SS 및 LC-LC 보상에 대해 두 전력 방향에서 응답을 얻을 수 있습니다. 둘 다 85kHz에서 작동하도록 설정되어 있습니다.
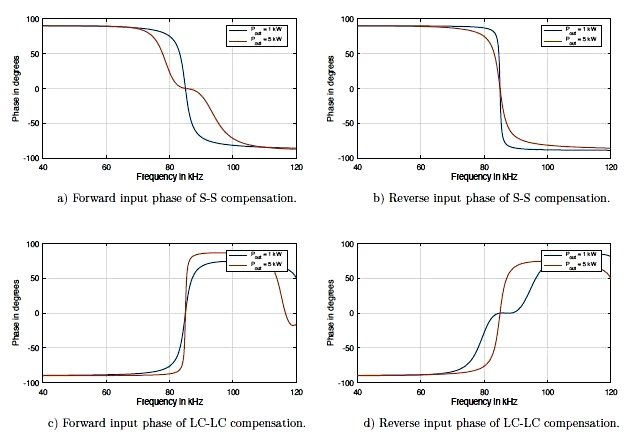
그림 5 : 두 전원 모드에서 ZVS 작동 가능성을 확인하기위한 입력 위상 응답
해당 입력 위상 응답은 그림 5에 표시되어 있습니다. 위상 응답은 SS 순방향에서 (작동 범위에 걸쳐) 평탄화를 시작하여 사용 가능한 ZVS 범위를 제한합니다. 반대로 반전 모드에서는 높은 품질 요인으로 인한 급격한 변화에는 많은 무효 전력이 필요합니다. LC-LC에서도 동일한 경향이 관찰 될 수 있지만 반응이 서로 바뀝니다.
단순성 : LC를 부분 시리즈 토폴로지 LCC로 확장함으로써 XNUMX 차 제어에 적합한 품질 계수를 개선 할 수 있습니다. 그러나 추가 된 구성 요소로 인해 비용과 복잡성이 증가합니다. 또한 양쪽에 동일한 유형의 보상을 사용하면 대칭성을 유지하고 설계 노력을 줄일 수 있습니다.
반사 임피던스 : 반사 된 임피던스의 반응 성분은 공진에 영향을 미칩니다. 부분 병렬 보상에는 항상 일부 반응 성분이 있습니다. SS 및 LCC-LCC 보상은 공진 이하에서 작동 할 때 반사 된 리액턴스가 XNUMX이되는 반면 (코일 사이에 오프셋이있는 경우 제외). 주의를 기울이지 않으면 일부 시나리오에서 트랜지스터의 소프트 턴온을 제한하여 운영 효율성을 떨어 뜨릴 수 있습니다. 적응 형 조정은이 문제를 완화하는 데 도움이 될 수 있습니다. 적절한 설계 기술을 사용하면 위치에 관계없이 두 모드에서 ZVS 작동을 보장하기 위해 최적의 튜닝을 선택할 수 있습니다.
요약하자면 양방향 무선 충전 시스템의 설계 시작부터 순방향 및 역방향 작동 모드에 대한 모든 제약 조건을 고려해야합니다. 코일 매개 변수와 튜닝 시스템이 단방향 설계와 동일한 방식으로 선택되면 성능이 저하됩니다. 따라서 전력 전자 장치의 비용과 한계를 고려하면서 자기 시스템을 최적화하기 위해 처음부터 모든 요구 사항과 제약 조건을 컴파일하려면 상향식 접근 방식이 필요합니다.
Finepower는 무선 충전의 기술적 한계를 지속적으로 확장하고 있으며 고객이이 기술을 각 애플리케이션에 효율적으로 구현할 수 있도록 지원합니다.