産業または輸送におけるモビリティの電化率は、充電インフラストラクチャの展開によって異なります。 既存のソリューション、つまり導電性充電には、特に高電力の場合、巨大なケーブルを差し込むため、安全性、堅牢性、および快適性にいくつかの懸念があります。 ワイヤレス充電は、安全でクリーンな自律型ソリューションを提供するために宣伝されています。
ワイヤレスおよび誘導電力伝送(IPT)とは何ですか?
科学者のニコラテスラは「ワイヤレス電力伝送」(WPT)という用語を作り出し、1893年に非接触システムを発表しました。これを支配する基本原則 テクノロジー レンツの法則とマイケル・ファラデーの帰納法です。 これを利用できる方法は数多くあります。 最も商業化に成功したもの(低電力レベルで)は、「誘導電力伝送」(IPT)です。 IPTはニアフィールドを使用します テクノロジー エネルギーが送信機の狭い領域内に留まる場合。
Finepowerは、数年前からワイヤレス(誘導)電力伝送のソリューションを開発しています。 現在、このテクノロジーを高電力、低電力と組み合わせた双方向操作に拡張しています 電圧 バイエルン経済省とプロジェクト実行組織VDI-VDE-Iによって資金提供されている研究プロジェクトBiLiAのバッテリー。
IPT磁気コイルシステム
磁気結合ステージは、パワーエレクトロニクス、効率、および伝達可能な電力の設計を決定する最も重要な部分です。 電気自動車の充電などの一般的なアプリケーションでは、二次側コイルは車両の下側に取り付けられます。 一次コイル側は地面に置かれます。 このアセンブリは、フェライトと アルミニウム 各コイルの外側にあります。 フェライトブロックの積層や成形も可能です。 コイル間のエアギャップは、車両の最低地上高によっては非常に大きくなる可能性があります。 これにより、相互インダクタンスと同様の寸法の漏れインダクタンスが発生します。 IPTシステムの各コイルは、円形、長方形、ソレノイド、DD、DDQ、バイポーラなどの形状にすることができます。 各コイルシステムの利点は、相互運用性、サイズ、磁束漏れ、位置公差、および操作の複雑さによって異なります。 より高い電力では、アンペアターン(または起磁力)を減らすために、バイファイラー巻線が使用されます。 IPTシステム全体の効率は、コイルの固有の品質係数によって制限されます。 これは、Litzワイヤーを使用して、バンドルレベルとストランドレベルの両方でスキンと近接損失を慎重に減らすことで増やすことができます。

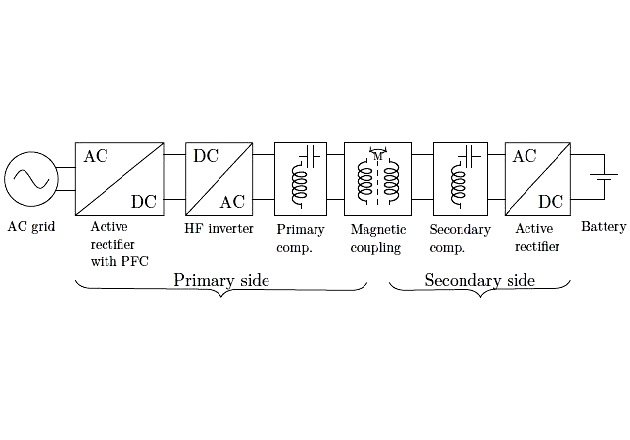
図 1: 一般的な電磁誘導充電ステーションのブロック図。 系統電力は、PFC とインバーターをそれぞれ使用して整流され、高周波信号に変換されます。 一次コイルを通るこの高周波電流信号は磁束を生成します。 それにより、 電圧 セカンダリ全体にわたって。 信号は後で整流されて、DC バッテリー負荷に電力を供給します。
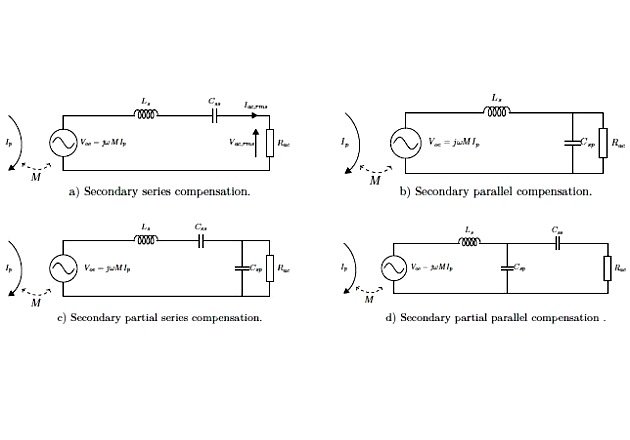
図 2: a) 二次側には、直列コンデンサ Css が追加されます。 値を適切に選択すると、二次インダクタンス (ωLs) をキャンセルして電力伝送を改善できます。 Voc によって見られるインピーダンスは、この周波数では純粋に抵抗性です。 これは通常、定数で使用されます 電圧 アプリケーション。 b) 直列コンデンサの代わりに並列コンデンサを使用すると、定電流アプリケーションに役立ちます。 c+d) 直列と並列を組み合わせたハイブリッド補償タイプ コンデンサ 調整することも可能です。
共振の最適化 回路 効率を最大化
典型的な誘導充電システムの簡略化されたモデルを図 1 に示します。PFC が整流されたグリッドを変換した後の高周波 (つまり、80 ~ 90 kHz) インバーター 電圧 効果的な電力伝送に必要なAC方形波に変換します。
一次コイルを通るこの高周波電流は磁束を生成し、 電圧 二次側全体に渡ります。 これ 電圧 オープンと呼ばれます-回路 電圧 (Voc) は式 1 で与えられます。ここで、Ip は XNUMX 次コイル電流、M は相互インダクタンス、ω は角周波数です。
Voc =jωMIp
Vocは、負荷に接続すると電力を供給し、式2で与えられます。ここで、Racは等価負荷抵抗(アクティブ整流器と負荷がXNUMX次側に与えるインピーダンス)です。LsはXNUMX次インダクタンスです。
P_ {out} = frac {V_ {2} ^ {oc} R_ {ac}} {R_ {2} ^ {ac} +(omega ^ {2} L_ {2} ^ {s})}
式 2 で最大電力伝達定理を使用すると、最大出力電力は Rac = ωLs で達成されます。シリーズの追加 コンデンサ 方程式で 1/ωC2 を使用して項 ωLs をキャンセルすると、最大伝達可能な電力を XNUMX 倍にすることができます。ただし、シリーズの代わりに、他のさまざまな補償トポロジーも可能です。任意の T (または n) – パッシブ エネルギー ストレージを使用して構築されたネットワークにすることができます コンポーネント。 二次側のいくつかの簡略化されたチューニングネットワークを図2に示します。
の出力電力 回路 は式 3 のように書くこともできます。ここで、Isc は短絡状態での 2 次側の電流、QXNUMX は XNUMX 次負荷品質係数です。
P_ {out} = V_ {oc} I_ {sc} Q_ {2} = frac {omega M ^ {2}} {L_ {s}} I_ {2} ^ {p} Q_ {2}
式3から、一次コイルの電流はQ2を増やすことで減らすことができ、したがって損失を減らすことができます。 ただし、システムの帯域幅が狭くなり、制御システムの実装がより困難になります。 二次コイルに必要なボルトアンペア定格も増加します。
双方向の電力潮流がグリッドコストを削減
温室効果ガスの排出を削減するために、再生可能エネルギーへの強い推進力があります。 最も顕著なのは太陽光発電と風力発電です。 しかし、太陽光と風の流れは断続的であり、そのような変動はグリッドを不安定にする可能性があります。 また、エネルギー自立を追求する中で、多くの業界が独自のシステムを導入しています。 これは、再生可能エネルギー技術へのアクセスがますます容易になるためです。 たとえば、車両の電化に駆り立てられた自動車の所有者は、(安価な)自家発電の恩恵を受けるため、グリッドシステムまたは充電ポイントを設置します。 一方で、これはピーク電力需要をカバーするための広い土地スペースの必要性の増加につながる可能性があります。 ただし、スマートグリッドストレージシステムは、必要なピーク電力を削減できます。 ピーク時にエネルギーを貯蔵し、必要に応じて供給することで、電力の流れを管理し、グリッドからの外部需要を安定させることができます。
容量が比較的大きいため、電気自動車のバッテリーは、グリッドを安定させるための理想的なエネルギー貯蔵要素と見なすことができます。 したがって、ワイヤレスシステムを含むバッテリー充電器は、双方向操作を提供するように拡張する必要があります。
双方向機能を備えたIPTシステムの変更モデルを図3に示します。順方向モードでは、電力はグリッドからバッテリー負荷に流れます。 PFCの後のブロックは、一次コイルを励起するインバーターとして機能します。 二次コイルからのAC電力をバッテリーに変換するには、整流器が必要です。 これらのブロックのそれぞれの機能は、リバースモードで交換されます。 報酬タイプとその値の選択は、多くの基準に依存します。 それらのいくつかを以下で説明します。
可制御性:一般的な制御方法は一次制御です。 この方法は、高周波(HF)インバーターの出力電圧を一次コイルの入力電圧として制御します。 式4によれば、電圧制御または位相制御のいずれかが可能です。 ここで、VdcはPFC出力電圧、αは位相角です。
V_ {in、rms} = frac {2sqrt {2}} {pi} V_ {dc} cosfrac {alpha} {2}
S(erial)-S(erial)およびLC-LC補償の典型的な電圧伝達関数図1.4。 コイルの位置は固定されており、1kWと5kWを供給します。 プロットは、順方向モードと逆方向モードの両方を示しています。 負荷品質係数が高すぎないようにしてください。必要な動作範囲がインバータの仕様を超える可能性があります。 一方、品質係数が低いと、使用可能な動作範囲を十分に活用できません。 LC-LC補償ゲイン応答に見られるように、ゲインの変動は小さいです。 また、SS順方向応答では、極分割はより高い電力で発生します。 これは、制御システムの設計を複雑にします。
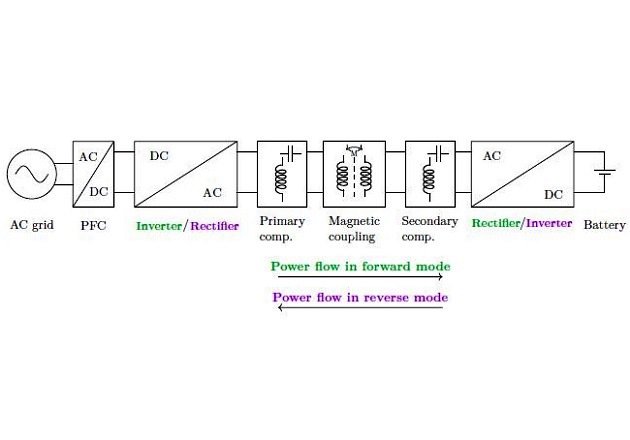
図3:システムは図1のラインですが、DC-ACコンバーターとAC-DCコンバーターの両方でデュアル操作が可能です。 これにより、双方向の電力伝送が可能になります。
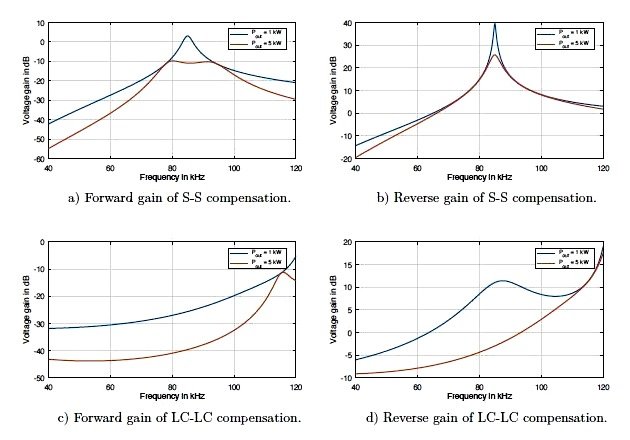
図4:ACは、SS補償とLC-LC補償について、両方の電力方向で応答を得ることができます。 両方とも85kHzで動作するようになっています。
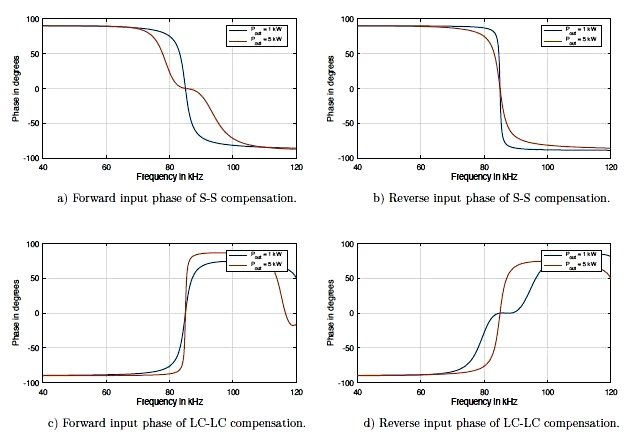
図5:両方の電力モードでZVS動作の可能性をチェックするための入力位相応答
対応する入力位相応答が図5にプロットされています。位相応答はSS前方で(動作範囲全体で)平坦化を開始し、使用可能なZVS範囲を制限します。 一方、リバースモードでは、高品質要因による急激な変化には多くの無効電力が必要です。 LC-LCでも同じ傾向が見られますが、応答が入れ替わっています。
シンプルさ:LCをパーシャルシリーズトポロジLCCに拡張することにより、プライマリコントロールに適した品質係数を向上させることができます。 ただし、コンポーネントが追加されるため、コストと複雑さが増します。 また、両側で同じタイプの補正を使用すると、対称性が維持され、設計の労力を減らすことができます。
反射インピーダンス:反射インピーダンスの無効成分は共振に影響します。 部分並列補償では、常に何らかの反応成分があります。 一方、SS補償とLCC-LCC補償はどちらも、共振以下で動作する場合、反射リアクタンスがゼロになります(コイル間にオフセットがある場合を除く)。 注意を怠ると、シナリオによってはトランジスタのソフトターンオンが制限され、動作効率が低下する可能性があります。 アダプティブチューニングは、この問題を軽減するのに役立ちます。 適切な設計手法を使用すると、最適なチューニングを選択して、位置を超えて両方のモードでZVSを確実に動作させることができます。
要約すると、双方向ワイヤレス充電システムの設計開始から、順方向と逆方向の両方の動作モードのすべての制約を考慮する必要があります。 一方向設計と同じ方法でコイルパラメータとチューニングシステムを選択すると、性能が低下します。 したがって、パワーエレクトロニクスのコストと制限を考慮しながら、磁気システムを最適化するために、最初からすべての要件と制約をまとめるには、ボトムアップアプローチが必要です。
Finepowerは、ワイヤレス充電の技術的限界を継続的に拡張しており、お客様がこのテクノロジーをそれぞれのアプリケーションに効率的に実装できるようにサポートしています。