อัตราการใช้พลังงานไฟฟ้าของการเคลื่อนย้ายในอุตสาหกรรมหรือการขนส่งขึ้นอยู่กับการปรับใช้โครงสร้างพื้นฐานการชาร์จ โซลูชันที่มีอยู่ ได้แก่ การชาร์จแบบนำไฟฟ้ามีข้อกังวลหลายประการในด้านความปลอดภัยความทนทานและความสะดวกสบายเนื่องจากการเสียบสายเคเบิลขนาดใหญ่โดยเฉพาะอย่างยิ่งสำหรับพลังงานที่สูงขึ้น การชาร์จแบบไร้สายได้รับการขนานนามว่าเป็นโซลูชันที่ปลอดภัยสะอาดและเป็นอิสระ
Wireless and Inductive Power Transfer (IPT) คืออะไร?
นักวิทยาศาสตร์ Nikola Tesla เป็นผู้บัญญัติศัพท์คำว่า“ Wireless Power Transfer” (WPT) และนำเสนอระบบไร้สัมผัสในปี 1893 หลักการพื้นฐานที่ควบคุมสิ่งนี้ เทคโนโลยี คือกฎของเลนซ์และกฎการเหนี่ยวนำของไมเคิล ฟาราเดย์ มีหลายวิธีที่สามารถนำไปใช้ได้ ความสำเร็จทางการค้าที่ประสบความสำเร็จมากที่สุด (ที่ระดับพลังงานต่ำ) คือ "การถ่ายโอนพลังงานแบบเหนี่ยวนำ" (IPT) IPT ใช้สนามระยะใกล้ เทคโนโลยี โดยที่พลังงานยังคงอยู่ภายในบริเวณเล็กๆ ของเครื่องส่ง
Finepower พัฒนาโซลูชันสำหรับการถ่ายโอนพลังงานแบบไร้สาย (อุปนัย) มาเป็นเวลาหลายปี ตอนนี้เรากำลังขยายเทคโนโลยีนี้ไปสู่การทำงานแบบสองทิศทางร่วมกับพลังงานสูงและต่ำ แรงดันไฟฟ้า แบตเตอรี่ในโครงการวิจัย BiLiA ซึ่งได้รับทุนจากกระทรวงเศรษฐศาสตร์บาวาเรียและองค์กรดำเนินโครงการ VDI-VDE-I
ระบบขดลวดแม่เหล็ก IPT
ขั้นตอนการเชื่อมต่อแม่เหล็กเป็นส่วนที่สำคัญที่สุดในการตัดสินใจออกแบบอุปกรณ์อิเล็กทรอนิกส์กำลังประสิทธิภาพและกำลังที่ถ่ายโอนได้ ในการใช้งานทั่วไปเช่นการชาร์จรถยนต์ไฟฟ้าขดลวดด้านที่สองจะติดอยู่ที่ด้านล่างของรถ ด้านขดลวดปฐมภูมิใส่กราวด์ การประกอบนี้มั่นใจได้ว่ามีฟลักซ์อยู่ระหว่างขดลวดทั้งสองโดยใช้เฟอร์ไรต์และ อลูมิเนียม ที่ด้านนอกของแต่ละขดลวด การซ้อนหรือการสร้างบล็อกเฟอร์ไรต์ก็ทำได้เช่นกัน ช่องว่างระหว่างขดลวดอาจมีขนาดค่อนข้างใหญ่ขึ้นอยู่กับระยะห่างจากพื้นดินของรถ สิ่งนี้นำไปสู่การเหนี่ยวนำการรั่วไหลของขนาดที่ใกล้เคียงกับการเหนี่ยวนำซึ่งกันและกัน ขดลวดแต่ละตัวในระบบ IPT สามารถมีรูปร่างเป็นวงกลมสี่เหลี่ยมโซลินอยด์ DD DDQ ไบโพลาร์ ฯลฯ ข้อดีของระบบขดลวดแต่ละระบบจะแตกต่างกันไปตามความสามารถในการทำงานร่วมกันขนาดการรั่วไหลของฟลักซ์ความคลาดเคลื่อนของตำแหน่งและความซับซ้อนในการปฏิบัติงาน ด้วยกำลังที่สูงขึ้นเพื่อลดการหมุนของแอมแปร์ (หรือแรงแม่เหล็ก) จะใช้ขดลวดสองชั้น ประสิทธิภาพของระบบ IPT ทั้งหมดถูก จำกัด โดยปัจจัยคุณภาพดั้งเดิมของขดลวด สิ่งนี้สามารถเพิ่มขึ้นได้โดยใช้ลวด Litz อย่างระมัดระวังเพื่อลดการสูญเสียผิวและการสูญเสียความใกล้เคียงทั้งในระดับมัดและระดับเกลียว

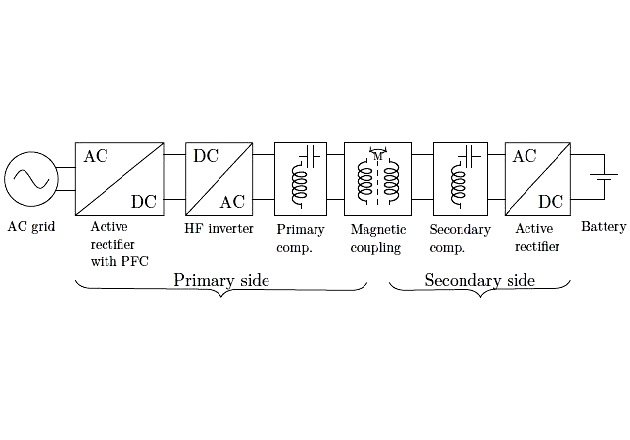
รูปที่ 1: บล็อกไดอะแกรมของสถานีชาร์จแบบเหนี่ยวนำโดยทั่วไป พลังงานกริดได้รับการแก้ไขและแปลงเป็นสัญญาณความถี่สูงโดยใช้ PFC และอินเวอร์เตอร์ตามลำดับ สัญญาณกระแสความถี่สูงนี้ผ่านขดลวดปฐมภูมิจะสร้างฟลักซ์ ด้วยเหตุนี้จึงชักนำให้ก แรงดันไฟฟ้า ข้ามมัธยมศึกษา สัญญาณได้รับการแก้ไขในภายหลังเพื่อส่งพลังงานไปยังโหลดแบตเตอรี่ DC
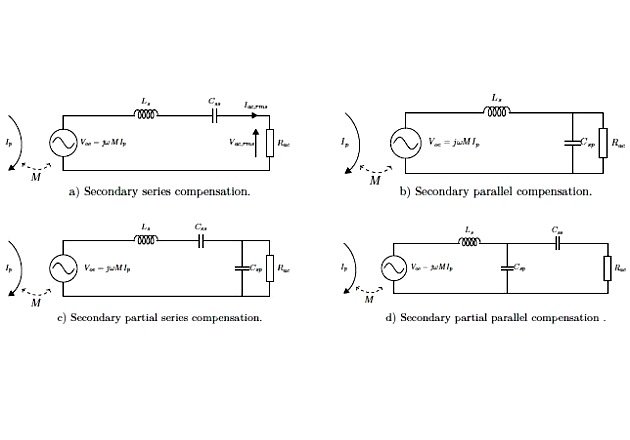
รูปที่ 2: a) ที่ด้านรอง มีการเพิ่มตัวเก็บประจุแบบอนุกรม Css ค่าที่เลือกอย่างเหมาะสมสามารถยกเลิกค่าความเหนี่ยวนำทุติยภูมิ (ωLs) เพื่อปรับปรุงการถ่ายโอนพลังงาน อิมพีแดนซ์ที่เห็นโดย Voc นั้นต้านทานได้ที่ความถี่นี้เท่านั้น โดยทั่วไปจะใช้ค่าคงที่ แรงดันไฟฟ้า แอพพลิเคชั่น. b) ตัวเก็บประจุแบบขนานแทนที่ชุดที่หนึ่งมีประโยชน์ในการใช้งานกระแสคงที่ c+d) ประเภทการชดเชยแบบไฮบริดที่อนุกรมและขนาน ตัวเก็บประจุ สามารถปรับได้อีกด้วย
การเพิ่มประสิทธิภาพเสียงสะท้อน วงจรไฟฟ้า เพิ่มประสิทธิภาพสูงสุด
แบบจำลองอย่างง่ายของระบบการชาร์จแบบอุปนัยทั่วไปแสดงในรูปที่ 1 อินเวอร์เตอร์ความถี่สูง (เช่น 80-90 kHz) หลังจาก PFC แปลงกริดแบบเรียงกระแส แรงดันไฟฟ้า เป็นคลื่นสี่เหลี่ยม AC ซึ่งจำเป็นสำหรับการถ่ายโอนพลังงานอย่างมีประสิทธิภาพ
กระแสความถี่สูงนี้ผ่านขดลวดปฐมภูมิทำให้เกิดฟลักซ์เหนี่ยวนำ a แรงดันไฟฟ้า ข้ามฝั่งรอง. นี้ แรงดันไฟฟ้า เรียกว่าเปิด-วงจรไฟฟ้า แรงดันไฟฟ้า (Voc) กำหนดโดยสมการที่ 1 โดยที่ Ip คือกระแสของขดลวดปฐมภูมิ M คือค่าความเหนี่ยวนำร่วมกัน และ ω คือความถี่เชิงมุม
Voc = jωMip
Voc เมื่อเชื่อมต่อกับโหลดจะให้พลังงานและกำหนดโดยสมการ 2 โดยที่ Rac คือความต้านทานโหลดที่เท่ากัน (อิมพีแดนซ์ที่นำเสนอโดยวงจรเรียงกระแสที่แอ็คทีฟและโหลดไปยังด้านทุติยภูมิ) Ls คือตัวเหนี่ยวนำทุติยภูมิ
P_ {out} = frac {V_ {2} ^ {oc} R_ {ac}} {R_ {2} ^ {ac} + (โอเมก้า ^ {2} L_ {2} ^ {s})}
เมื่อใช้ทฤษฎีบทการถ่ายโอนกำลังสูงสุดกับสมการที่ 2 จะได้กำลังเอาต์พุตสูงสุดที่ Rac = ωL กำลังเพิ่มซีรีส์ capacitor ในสมการด้วย 1/ωC2 เพื่อยกเลิกคำว่า ωL สามารถเพิ่มกำลังถ่ายโอนสูงสุดได้เป็นสองเท่า แต่แทนที่จะเป็นซีรีส์ โทโพโลยีการชดเชยอื่นๆ ก็สามารถทำได้เช่นกัน อาจเป็นเครือข่าย T (หรือ n) ใดก็ได้ที่สร้างขึ้นโดยใช้การจัดเก็บพลังงานแบบพาสซีฟ ส่วนประกอบ. เครือข่ายการปรับแต่งที่เรียบง่ายบางส่วนในด้านรองจะแสดงในรูปที่ 2
กำลังขับของ วงจรไฟฟ้า ยังสามารถเขียนเป็นสมการที่ 3 โดยที่ Isc คือกระแสของด้านทุติยภูมิภายใต้สภาวะการลัดวงจร และ Q2 เป็นปัจจัยด้านคุณภาพโหลดทุติยภูมิ
P_ {out} = V_ {oc} I_ {sc} Q_ {2} = frac {โอเมก้า M ^ {2}} {L_ {s}} I_ {2} ^ {p} Q_ {2}
จากสมการที่ 3 ค่าเช่าขดขดลวดปฐมภูมิสามารถลดลงได้โดยการเพิ่ม Q2 และลดการสูญเสีย แต่แบนด์วิดท์ของระบบจะลดลงทำให้การนำระบบควบคุมไปใช้งานยากขึ้น ระดับโวลต์ - แอมแปร์ที่ต้องการของขดลวดทุติยภูมิก็เพิ่มขึ้นเช่นกัน
การไหลของพลังงานแบบสองทิศทางช่วยลดต้นทุนกริด
เพื่อลดการปล่อยก๊าซเรือนกระจกมีแรงผลักดันอย่างมากต่อพลังงานหมุนเวียน พลังงานแสงอาทิตย์และพลังงานลมที่โดดเด่นที่สุด แต่แสงแดดและกระแสลมไม่สม่ำเสมอและความผันผวนดังกล่าวอาจทำให้กริดไม่เสถียร นอกจากนี้ในการแสวงหาประโยชน์จากพลังงานหลายอุตสาหกรรมกำลังติดตั้งระบบของตนเอง เนื่องจากความสะดวกในการเข้าถึงเทคโนโลยีพลังงานหมุนเวียนที่เพิ่มมากขึ้น ตัวอย่างเช่นเจ้าของกองยานยนต์ที่ขับเคลื่อนให้ยานพาหนะขับเคลื่อนด้วยพลังงานไฟฟ้าจะได้รับประโยชน์จากการผลิตพลังงานของตัวเอง (ที่ถูกกว่า) ดังนั้นจึงติดตั้งระบบกริดหรือจุดชาร์จ ในทางกลับกันสิ่งนี้อาจนำไปสู่ความต้องการพื้นที่ดินขนาดใหญ่ที่เพิ่มขึ้นเพื่อรองรับความต้องการพลังงานสูงสุด อย่างไรก็ตามระบบจัดเก็บข้อมูลแบบสมาร์ทกริดสามารถลดพลังงานสูงสุดที่ต้องการได้ ด้วยการจัดเก็บพลังงานในช่วงที่มีความพร้อมใช้งานสูงสุดและจัดหาเมื่อจำเป็นจะสามารถจัดการกระแสไฟฟ้าได้และความต้องการภายนอกจากกริดจะมีเสถียรภาพ
เนื่องจากความจุที่ค่อนข้างมากแบตเตอรี่ของรถยนต์ไฟฟ้าจึงถูกมองว่าเป็นองค์ประกอบในการจัดเก็บพลังงานที่เหมาะสำหรับการป้องกันการสั่นไหวของกริด ดังนั้นควรปรับปรุงเครื่องชาร์จแบตเตอรี่รวมถึงระบบไร้สายเพื่อให้สามารถทำงานแบบสองทิศทางได้
รูปแบบที่ปรับเปลี่ยนของระบบ IPT พร้อมฟังก์ชันการทำงานแบบสองทิศทางแสดงในรูปที่ 3 ในโหมดเดินหน้ากระแสไฟจากกริดไปยังโหลดแบตเตอรี่ บล็อกหลัง PFC ทำหน้าที่เป็นอินเวอร์เตอร์กระตุ้นขดลวดปฐมภูมิ ต้องใช้วงจรเรียงกระแสเพื่อแปลงไฟฟ้ากระแสสลับจากขดลวดทุติยภูมิเป็นแบตเตอรี่ ฟังก์ชันตามลำดับของบล็อกเหล่านี้จะเปลี่ยนไปในขณะที่อยู่ในโหมดย้อนกลับ การเลือกประเภทค่าตอบแทนและมูลค่าขึ้นอยู่กับหลายเกณฑ์ บางส่วนมีการกล่าวถึงด้านล่าง:
ความสามารถในการควบคุม: วิธีการควบคุมทั่วไปคือการควบคุมหลัก วิธีนี้จะควบคุมแรงดันไฟฟ้าขาออกของอินเวอร์เตอร์ความถี่สูง (HF) เป็นแรงดันไฟฟ้าอินพุตของขดลวดปฐมภูมิ ตามสมการ 4 สามารถควบคุมแรงดันไฟฟ้าหรือการควบคุมเฟสได้ โดยที่ Vdc คือแรงดันเอาต์พุต PFC และαคือมุมเฟส
V_ {in, rms} = frac {2sqrt {2}} {pi} V_ {dc} cosfrac {alpha} {2}
ฟังก์ชันการถ่ายโอนแรงดันไฟฟ้าโดยทั่วไปของการชดเชย S (erial) -S (erial) และ LC-LC รูปที่ 1.4 ตำแหน่งขดลวดคงที่ส่งมอบ 1 กิโลวัตต์และ 5 กิโลวัตต์ พล็อตแสดงทั้งโหมดเดินหน้าและถอยหลัง ปัจจัยคุณภาพของโหลดไม่ควรสูงเกินไปช่วงการทำงานที่ต้องการอาจเกินข้อกำหนดของอินเวอร์เตอร์ ในทางกลับกันปัจจัยคุณภาพต่ำจะใช้ประโยชน์จากช่วงการทำงานที่มีอยู่ได้ไม่เต็มที่ ดังที่เห็นได้จากการตอบสนองการชดเชยการชดเชย LC-LC ความแปรผันของอัตราขยายจะต่ำ และในการตอบสนองไปข้างหน้า SS การแยกขั้วจะเกิดขึ้นด้วยกำลังที่สูงขึ้น ทำให้การออกแบบระบบควบคุมมีความซับซ้อน
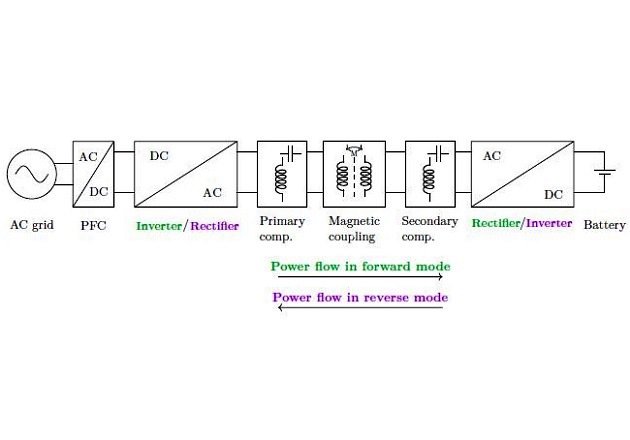
รูปที่ 3: ระบบเป็นบรรทัดในรูปที่ 1 แต่ด้วยการทำงานแบบคู่ที่เป็นไปได้สำหรับทั้งตัวแปลง DC-AC และ AC-DC สิ่งนี้ช่วยให้การถ่ายโอนพลังงานแบบสองทิศทาง
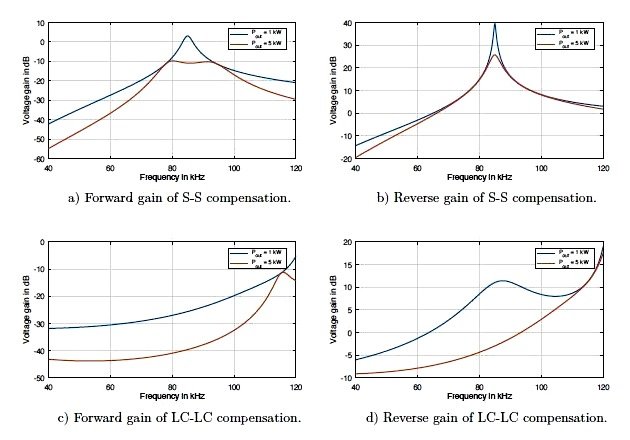
รูปที่ 4: AC สามารถรับการตอบสนองได้ทั้งสองทิศทางกำลังที่กำหนดไว้สำหรับการชดเชย SS และ LC-LC ทั้งสองเปิดใช้งานที่ 85 kHz
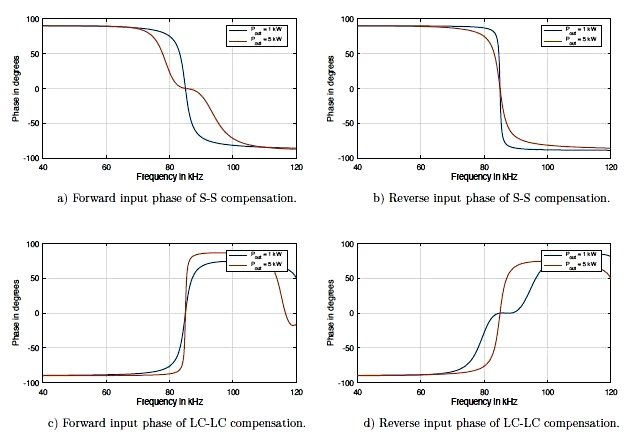
รูปที่ 5: การตอบสนองเฟสอินพุตเพื่อตรวจสอบความเป็นไปได้ในการทำงานของ ZVS ทั้งในโหมดพลังงาน
การตอบสนองเฟสอินพุตที่สอดคล้องกันแสดงไว้ในรูปที่ 5 การตอบสนองของเฟสเริ่มแฟบ (ตลอดช่วงการทำงาน) ใน SS ไปข้างหน้าโดย จำกัด ช่วง ZVS ที่มีอยู่ ในขณะที่โหมดย้อนกลับการเปลี่ยนแปลงที่คมชัดเนื่องจากปัจจัยคุณภาพสูงต้องการพลังงานปฏิกิริยาจำนวนมาก แนวโน้มเดียวกันนี้สามารถสังเกตได้ใน LC-LC แต่มีการตอบสนองที่เปลี่ยนแปลง
ความเรียบง่าย: ด้วยการขยาย LC ไปยัง LCC โทโพโลยี partialseries ทำให้สามารถปรับปรุงปัจจัยคุณภาพที่เหมาะสมกับการควบคุมหลักได้ แต่จะเพิ่มต้นทุนและความซับซ้อนเนื่องจากส่วนประกอบที่เพิ่มเข้ามา นอกจากนี้ยังใช้การชดเชยประเภทเดียวกันทั้งสองด้านเพื่อรักษาความสมมาตรและสามารถลดความพยายามในการออกแบบได้
อิมพีแดนซ์สะท้อน: องค์ประกอบปฏิกิริยาของเอฟเฟกต์อิมพีแดนซ์สะท้อน ในการชดเชยบางส่วน - ขนานมักจะมีองค์ประกอบที่เป็นปฏิกิริยาอยู่เสมอ ในขณะที่ทั้งการชดเชย SS และ LCC-LCC จะมีค่ารีแอคแตนซ์สะท้อนเป็นศูนย์เมื่อทำงานต่ำกว่าเรโซแนนซ์ (ยกเว้นหากมีการชดเชยระหว่างขดลวด) หากไม่ใช้ความระมัดระวังสิ่งนี้สามารถ จำกัด การเปิดแบบนุ่มนวลของทรานซิสเตอร์ในบางสถานการณ์ซึ่งจะทำให้ประสิทธิภาพในการทำงานลดลง การปรับจูนแบบปรับอัตโนมัติสามารถช่วยบรรเทาปัญหานี้ได้ ด้วยเทคนิคการออกแบบที่เหมาะสมคุณจะได้รับตัวเลือกการปรับแต่งที่เหมาะสมที่สุดเพื่อให้แน่ใจว่าการทำงานของ ZVS ทั้งสองโหมดในตำแหน่งต่างๆ
สรุปได้ว่าจำเป็นต้องพิจารณาข้อ จำกัด ทั้งหมดสำหรับโหมดการทำงานทั้งเดินหน้าและถอยหลังตั้งแต่เริ่มออกแบบระบบชาร์จไร้สายแบบสองทิศทาง ประสิทธิภาพจะลดลงหากเลือกพารามิเตอร์คอยล์และระบบจูนในลักษณะเดียวกับการออกแบบทิศทางเดียว ดังนั้นจึงจำเป็นต้องมีแนวทางด้านล่างเพื่อรวบรวมข้อกำหนดและข้อ จำกัด ทั้งหมดตั้งแต่เริ่มต้นเพื่อเพิ่มประสิทธิภาพระบบแม่เหล็กในขณะที่พิจารณาต้นทุนและข้อ จำกัด ของอุปกรณ์อิเล็กทรอนิกส์กำลัง
Finepower กำลังขยายข้อ จำกัด ทางเทคนิคของการชาร์จแบบไร้สายอย่างต่อเนื่องและสนับสนุนให้ลูกค้านำเทคโนโลยีนี้ไปใช้กับแอพพลิเคชั่นของตนได้อย่างมีประสิทธิภาพ