
"ICU-10201 offre la sensibilité requise pour l'évitement d'obstacles ou la détection de proximité, qui est fréquemment utilisée dans la robotique, les drones et les robots aspirateurs", selon la société. "Le capteur fournit des mesures de portée au millimètre près sur des cibles situées à des distances allant jusqu'à 1.7 m, dans toutes les conditions d'éclairage, y compris en plein soleil, indépendamment de la couleur et de la transparence optique de la cible, comme le verre ou les miroirs."
1.7 m pour un mur, réduit à 1.1 m pour un poteau de 58 mm de diamètre. La précision est affectée par la dérive de la vitesse du son de 0.2 %/°C. La portée minimale est de 100 mm, bien que les objets puissent être détectés et parfois téléportés jusqu'à 30 mm.
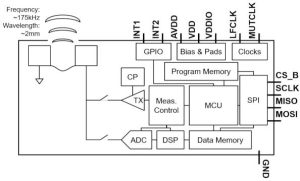
La puce mesure 1.26 mm de haut et son sommet est doté d'un port sonore central dont le champ de vision est approximativement hémisphérique, mais peut être réduit à l'aide d'un pavillon externe où l'augmentation du diamètre entraîne des faisceaux étroits. La société propose des données de conception pour plusieurs pavillons. Le fonctionnement sonore est nominalement de 175 kHz – la résonance varie entre 173 et 181 kHz selon les tolérances de fabrication.
Le microcontrôleur interne de 40 MHz peut traiter les lectures brutes du capteur en fonction de la plage (simultanément vers plusieurs objets) ou des événements tels que la présence. Ceci est communiqué à un hôte via SPI fonctionnant à 13 MHz et 1.8 ou 3.3 V.
"Plusieurs algorithmes disponibles peuvent traiter davantage les informations d'écho pour une variété de cas d'utilisation dans une gamme d'applications, notamment la télémétrie, la présence humaine et l'approche de réveil", a déclaré TDK.
SonicLib est un logiciel pilote associé pour le microcontrôleur hôte, écrit en C et destiné à être indépendant du compilateur et du microcontrôleur.
Il contrôle un ou plusieurs ICU-10201 connectés à un ou plusieurs ports SPI hôte sur le processeur hôte et permet la programmation, la configuration, le déclenchement et la lecture des données des capteurs. "Le pilote nécessite uniquement que le client implémente une couche d'E/S qui communique avec le matériel SPI et GPIO du processeur hôte", a déclaré TDK.
Des techniques sont disponibles pour permettre à plusieurs appareils de fonctionner au même endroit – aucune précaution n’est nécessaire au-delà d’une séparation de 4 m.
Une version spéciale – ICU-10201-PC (« pitch-catch ») est disponible pour les situations dans lesquelles un appareil doit servir d'émetteur pour un autre ou plusieurs autres appareils à proximité. Celui-ci présente une variation de fréquence de résonance d'une pièce à l'autre plus étroite (176 à 178 kHz).
Trois rails d'alimentation sont nécessaires : analogique (1.71 à 1.89 V), numérique (idem) et IO (1.71 à 3.63 V).
La consommation (analogique+numérique, pas IO) pour un seul CU-10201 dépend de la portée et de la fréquence de mise à jour. Exemples : 14 µA (0.5 m max. 1 échantillon/s), 17 µA (1 m max. 1 échantillon/s, 212 µA (0.5 m max, 50 échantillons/s) ou 320 µA (1 m max, 50 échantillons/s).
Le fonctionnement s'effectue entre -40 et 85°C.
Les applications potentielles sont : l'évitement d'obstacles pour les robots et les drones, la protection contre les falaises pour les aspirateurs, l'identification des surfaces molles et la mesure du niveau de liquide – cette dernière dans les machines à café, par exemple.