
“O ICU-10201 oferece a sensibilidade necessária para evitar obstáculos ou detecção de proximidade, que é frequentemente usada em robótica, drones e aspiradores de pó robóticos”, segundo a empresa. “O sensor fornece medições de alcance com precisão milimétrica para alvos a distâncias de até 1.7 m, em qualquer condição de iluminação, incluindo luz solar total, independentemente da cor do alvo e da transparência óptica, como vidro ou espelhos.”
1.7 m é para uma parede, reduzindo para 1.1 m para um poste de 58 mm de diâmetro. A precisão é afetada pelo desvio de 0.2%/°C da velocidade do som. O alcance mínimo é de 100 mm, embora objetos possam ser detectados e, às vezes, alcancem até 30 mm.
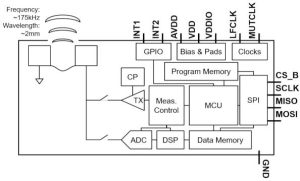
O chip tem 1.26 mm de altura e sua parte superior possui uma porta de som central cujo campo de visão é aproximadamente hemisférico, mas pode ser reduzido usando uma buzina externa onde o aumento do diâmetro resulta em feixes estreitos – a empresa oferece dados de projeto para diversas buzinas. A operação sonora é nominalmente de 175kHz – a ressonância varia de 173 a 181kHz de acordo com a tolerância de fabricação.
O microcontrolador interno de 40 MHz pode processar as leituras brutas do sensor em alcance (simultaneamente para vários objetos) ou eventos como presença. Isso é comunicado a um host por SPI operando a 13 MHz e 1.8 ou 3.3 V.
“Vários algoritmos disponíveis podem processar ainda mais as informações de eco para uma variedade de casos de uso em uma variedade de aplicações, incluindo localização de alcance, presença humana e abordagem de ativação”, disse TDK.
SonicLib é um software de driver associado para o microcontrolador host, escrito em C e destinado a ser independente de compilador e microcontrolador.
Ele controla um ou mais ICU-10201 conectados a uma ou mais portas SPI host no processador host e permite programação, configuração, disparo e leitura de dados dos sensores. “O driver requer apenas que o cliente implemente uma camada de E/S que se comunique com o hardware SPI e GPIO do processador host”, disse TDK.
Estão disponíveis técnicas para permitir que vários dispositivos operem no mesmo local – não são necessárias precauções além da separação de 4 m.
Uma versão especial – ICU-10201-PC (“pitch-catch”) está disponível para situações em que um dispositivo precisa atuar como transmissor para outro ou vários outros dispositivos próximos. Isto tem uma variação de frequência ressonante parte a parte mais estreita (176 a 178kHz).
São necessários três barramentos de alimentação: analógico (1.71 a 1.89V), digital (mesmo) e IO (1.71 a 3.63V).
O consumo (analógico+digital, não IO) para um único CU-10201 depende do alcance e da taxa de atualização. Os exemplos são: 14 µA (0.5 m no máximo 1 amostra/s), 17 µA (1 m no máximo 1 amostra/s, 212 µA (0.5 m no máximo, 50 amostras/s) ou 320 µA (1 m no máximo, 50 amostras/s).
A operação ocorre entre -40 e 85°C.
As aplicações potenciais são: prevenção de obstáculos para robôs e drones, detecção de penhascos para aspiradores de pó, identificação de superfícies macias e medição de nível de líquidos – esta última em máquinas de café, por exemplo.