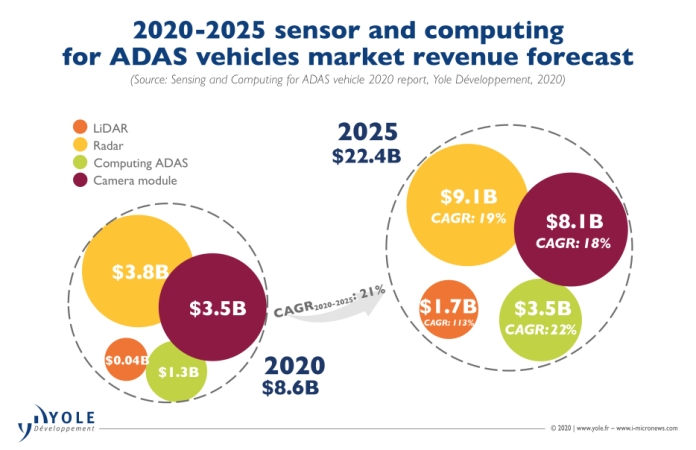
Les systèmes avancés d'aide à la conduite (ADAS) sont un important moteur de croissance et d'innovation dans le capteur marché. Le marché des capteurs pour les véhicules ADAS devrait atteindre 22.4 milliards de dollars en 2025, mené par les radars, selon Yole Développement (Yolé). En 2025, les revenus du radar devraient atteindre 9.1 milliards de dollars, et bien qu'il s'agisse d'un marché relativement petit aujourd'hui, les revenus du LiDAR devraient atteindre 1.7 milliard de dollars. Bien que le LiDAR dans ADAS ne représente que 1.5% du marché du LiDAR automobile et industriel en 2020, la part d'ADAS devrait atteindre 41% en 2026, selon Yole.
En général, le radar fonctionne en transmettant un signal qui rebondit sur un objet pour déterminer sa présence et sa portée. En envoyant un signal à une fréquence spécifique, le système analyse alors la fréquence de retour. Pour ADAS, la différence entre les deux, y compris l'effet Doppler possible, détermine la position, la distance et la vitesse des obstacles.
Le radar est également capable de balayer l'environnement environnant. Par conséquent, il est devenu un capteur essentiel pour des applications telles que la prévention des collisions, car il fonctionne dans l'obscurité et dans des conditions météorologiques défavorables et est relativement peu coûteux.
De même, LiDAR est un outil de détection sans souci dont la tâche principale est de détecter des objets et de cartographier leurs distances. Ceci est réalisé en éclairant une cible avec une impulsion optique (dont la largeur varie de quelques nanosecondes à plusieurs microsecondes) et en mesurant les caractéristiques du signal de retour réfléchi.
Les facteurs clés pour extraire des informations utiles à partir des signaux lumineux renvoyés sont la puissance d'impulsion, le temps d'aller-retour, le déphasage et la largeur d'impulsion. Même si plusieurs types différents de systèmes LiDAR sont disponibles, ils peuvent être regroupés en deux catégories par rapport au type d'orientation du faisceau : les LiDAR mécaniques et optiques.
Un LiDAR mécanique s'appuie sur une optique de haute qualité et un ensemble rotatif pour créer un large champ de vision (FoV), jusqu'à 360°. Le rapport signal sur bruit associé est assez excellent sur le FoV, mais la solution est volumineuse et lourde. Les LiDAR à semi-conducteurs, quant à eux, ne comportent aucune pièce mécanique en rotation, offrant un haut degré de fiabilité. Même si leur FoV est réduit, il existe un moyen de surmonter cette limitation.
Les analystes de Yole prévoient que le marché ADAS atteindra plus de 60 milliards de dollars en 2026, avec un taux de croissance annuel composé de 6.5% de 2020 à 2026, dans le cadre de l'industrie de la connectivité automobile, de l'autonomie, du partage/abonnement et de l'électrification (CASE) qui est devrait atteindre 318 milliards de dollars d'ici 2035.
L'innovation continue et l'intégration de nouvelles fonctionnalités sont l'un des principaux moteurs de cette croissance. À titre d'exemple, Yole a déclaré que plus de 80 sociétés LiDAR ont été créées depuis l'introduction du LiDAR 3D en temps réel de Velodyne en 2005, et nombre d'entre elles sont basées sur de nouvelles technologies.

Cliquer pour agrandir l'image. (Source : Yole)
Véritable radar à semi-conducteurs
L'une de ces innovations est une technologie LiDAR à semi-conducteurs de XénomatiX, conçu pour l'ADAS et la conduite autonome. Cette nouvelle solution adopte une approche fondamentalement différente par rapport aux LiDAR optiques conventionnels, qui utilisent des mesures séquentielles pour envoyer la lumière laser dans une direction, prendre une mesure, puis passer à la position suivante. Ils mesurent et acquièrent le scénario environnant étape par étape.
L'ensemble de la scène peut être détecté en « un seul flash » sans les contraintes d'une portée plus courte ou d'une puissance élevée, avec des portées supérieures à 200 mètres et une consommation électrique normale. Contrairement à la numérisation des LiDAR, les nuages de points haute résolution ne nécessitent aucun post-traitement pour la correction de l'espace-temps, ce qui permet une fréquence d'images beaucoup plus élevée et une meilleure correction.
En conséquence, le LiDAR de XenomatiX n'a pas à se déplacer très rapidement, comme le font les systèmes optiques conventionnels « pointer et mesurer ». Comme la scène est mesurée en envoyant tous les faisceaux en même temps sans effectuer de balayage, le système dispose de plus de temps pour traiter la grille haute résolution des points de mesure.
Aujourd'hui, de nombreux systèmes LiDAR sont mécaniques, bien qu'il y ait une grande tendance vers les technologies à semi-conducteurs. Ils utilisent des têtes de filage, ce qui entraîne des solutions encombrantes, lourdes et coûteuses. Pour surmonter ces limitations, des technologies telles que les miroirs oscillants ont été adoptées pour réduire la taille de la solution. Cependant, cela reste encore un appareil quelque peu mécanique.
XenomatiX, fondée en 2013 et basée à Louvain, en Belgique, a introduit le terme « vrai » pour identifier les systèmes LiDAR à semi-conducteurs construits à l'aide d'un Semi-conducteurs-source laser et détecteur à base et sans balayage ni pièces mobiles. L'approche de l'entreprise est une solution pour la numérisation en mouvement, car elle supprime le temps de latence causé par les capteurs de numérisation lorsqu'ils se déplacent dans leur modèle de numérisation.
Ce concept est bien adapté aux applications automobiles, car il élimine le besoin de compenser le mouvement : tous les faisceaux sont envoyés exactement en même temps, acquérant tous les points en même temps via un obturateur global.
La conception du LiDAR à semi-conducteurs XenoLidar-X est efficace dans tous les scénarios dans lesquels les conditions d'éclairage et météorologiques peuvent varier considérablement. La solution à semi-conducteurs de nouvelle génération XenomatiX comprend 15,000 0.15 faisceaux laser, projetés simultanément, ce qui améliore la résolution à un niveau de XNUMX° horizontalement et verticalement, conformément aux exigences actuelles du marché les plus exigeantes.


LiDAR XenoLidar-X de XenomatiX (Source : XenomatiX)
Dans ses LiDAR à semi-conducteurs, XenomatiX utilise des lasers à cavité verticale à émission de surface (VCSEL), qui sont des sources laser de très faible puissance offrant une très bonne durabilité et durée de vie, bien meilleures que les lasers à diode traditionnels.
Les solutions de la société sont connues sous le nom de LiDAR 6D, ce qui signifie qu'elles fournissent deux types de sorties avec une superposition parfaite. Le premier est un nuage de points, une géométrie 3D qui inclut tous les spots laser détectés. La seconde est une image de caméra 2D visuelle. Il peut être considéré comme un LiDAR avec une caméra intégrée de manière inhérente, ou une caméra avec des performances LiDAR et aucune erreur de parallaxe. La disponibilité de données redondantes permet la fusion de capteurs, fournissant des informations complémentaires qui prennent en charge les applications de sécurité. La sixième dimension est la réflectivité des objets, basée sur la quantité de lumière laser renvoyée.
Le détecteur CMOS spécialement conçu, qui peut fonctionner en modes 2D ou 3D, utilise des algorithmes d'IA propriétaires pour traiter l'image visuelle ou le nuage de points.
XenomatiX l'appelle IA à quatre dimensions, ce qui signifie qu'il effectue une reconnaissance de formes dans un espace 4D, où les coordonnées x, y et z sont combinées avec l'intensité du faisceau laser réfléchi. Le capteur est conçu pour fonctionner également comme un détecteur en mode 2D lorsque le laser est éteint. Si le laser est allumé, le système peut utiliser les mêmes pixels pour effectuer des mesures 3D et générer le nuage de points 3D.
Les LiDAR à semi-conducteurs offrent également une excellente fiabilité, ce qui est un facteur clé dans les applications automobiles. Le temps moyen entre pannes est en effet très bon du fait de l'absence de pièces mobiles, de l'utilisation des VCSEL (qui sont des lasers à longue durée de vie), et de la maturité de la technologie CMOS.
En plus des applications automobiles, la technologie LiDAR peut être utilisée pour la cartographie aérienne et géographique 3D, les systèmes de sécurité dans les usines, les munitions intelligentes et l'analyse des gaz.
Puce radar d'imagerie 4D
L'amélioration des « yeux » de l'ADAS va au-delà du LiDAR pour inclure de nouveaux capteurs capables de gérer des scénarios de conduite complexes, ou ce qu'on appelle le niveau 4, ou une automatisation élevée.
Parmi les développeurs se trouve Imagerie Vayyar, un spécialiste israélien des capteurs. La plate-forme XRR de la société pour ADAS est une puce radar d'imagerie 4D unique avec une portée allant jusqu'à 300 mètres. La puce radar fournit également un FoV de 180˚, fonctionnant sans avoir besoin d'un processeur externe.
La fonction 4D fait référence à la capacité de la puce à mesurer la distance et la vitesse relative ainsi que l'azimut des objets et leur hauteur par rapport au niveau de la route.
Un réseau MIMO de 48 antennes prend en charge la nouvelle plate-forme, qui est également qualifiée AEC-Q100 et conforme ASIL-B. On dit que le RFIC élimine le besoin de périphériques externes tels que les capteurs LiDAR, réduisant les coûts de câblage, la consommation d'énergie et les efforts d'intégration.
La puce XRR multi-gamme fonctionne dans les bandes radar de 76 à 81 GHz et peut différencier les obstacles statiques tels que les diviseurs, les bordures et les véhicules en stationnement ainsi que les véhicules en mouvement et autres dangers.
Dans les environnements à faible vitesse tels que les parkings, la puce scanne les environs à la recherche de piétons et d'obstacles à l'aide d'une détection d'imagerie radar à ultra-courte et courte portée. À plus longue portée, la puce radar permet des applications ADAS telles que le régulateur de vitesse adaptatif, la détection des angles morts, l'avertissement de collision, les alertes de trafic transversal et le freinage d'urgence autonome.


Carte avec puce XRR de Vayyar (Source : Vayyar Imaging)
Le radar d'imagerie 4D fournit près de 500 canaux virtuels (contre un canal dans le radar traditionnel). Contrairement aux caméras et aux LiDAR, le radar d'imagerie 4D fonctionne dans toutes les conditions, y compris le brouillard, les fortes pluies et la nuit. Sa portée plus longue répond aux exigences de niveaux plus élevés d'automatisation des véhicules. Le radar capture également les décalages Doppler, qui détectent si un objet se déplace vers le véhicule ou s'en éloigne.
De plus, contrairement aux caméras et aux LiDAR, le radar d'imagerie 4D utilise l'écholocalisation et le principe de mesure du temps de vol pour balayer son environnement. Avec une portée de 300 mètres, le radar fonctionne également bien dans les tempêtes de neige, lorsque l'imagerie est très difficile.
Le capteur 4D utilise des variables temporelles pour analyser les environnements 3D pour l'élévation. Cela peut aider à détecter et à identifier les objets stationnaires le long de la chaussée.
Pouvoir scanner l'environnement routier autour du véhicule avec une précision et une définition accrues permettrait à l'électronique embarquée d'interpréter de plus grandes quantités de données, nécessitant des vitesses de traitement plus élevées pour l'application ADAS. Le résultat, a déclaré Vayyar, est une plus grande fiabilité.
Le radar sur puce de la société intègre également un DSP et un MCU internes pour le traitement du signal en temps réel sans avoir besoin d'un processeur externe.