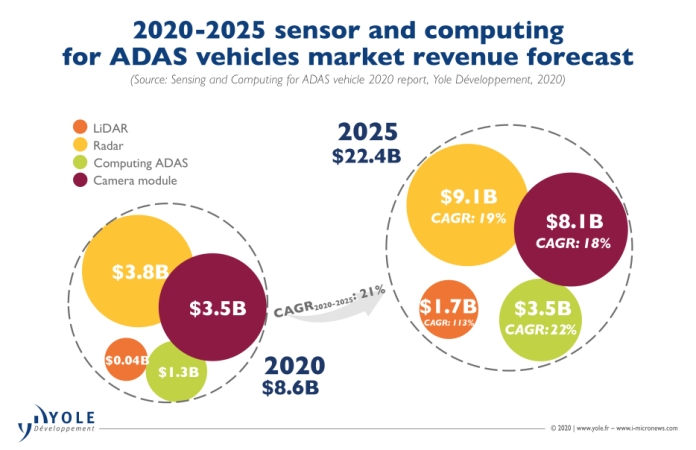
ระบบช่วยเหลือผู้ขับขี่ขั้นสูง (ADAS) เป็นตัวขับเคลื่อนสำคัญสำหรับการเติบโตและนวัตกรรมใน เซ็นเซอร์ ตลาด. ตลาดเซ็นเซอร์สำหรับรถยนต์ ADAS คาดว่าจะสูงถึง 22.4 พันล้านดอลลาร์ในปี 2025 นำโดยเรดาร์ Yole Développement (โยล). ในปี 2025 รายรับจากเรดาร์คาดว่าจะสูงถึง 9.1 พันล้านดอลลาร์ และแม้จะเป็นตลาดที่ค่อนข้างเล็กในปัจจุบัน แต่รายรับจาก LiDAR คาดว่าจะเติบโตเป็น 1.7 พันล้านดอลลาร์ แม้ว่า LiDAR ใน ADAS จะแสดงเพียง 1.5% ของตลาด LiDAR สำหรับยานยนต์และอุตสาหกรรมในปี 2020 แต่ส่วนแบ่ง ADAS คาดว่าจะสูงถึง 41% ในปี 2026 ตามข้อมูลของ Yole
โดยทั่วไป เรดาร์ทำงานโดยการส่งสัญญาณที่กระดอนออกจากวัตถุเพื่อระบุการมีอยู่และระยะของวัตถุ โดยส่งสัญญาณที่ความถี่เฉพาะ จากนั้นระบบจะวิเคราะห์ความถี่ที่ส่งกลับ สำหรับ ADAS ความแตกต่างระหว่างทั้งสอง ซึ่งรวมถึงเอฟเฟกต์ Doppler ที่เป็นไปได้ เป็นตัวกำหนดตำแหน่ง ระยะทาง และความเร็วของสิ่งกีดขวาง
เรดาร์ยังสามารถสแกนสภาพแวดล้อมโดยรอบ ดังนั้นจึงกลายเป็นเซ็นเซอร์ที่สำคัญสำหรับการใช้งานเช่นการหลีกเลี่ยงการชนเพราะทำงานในที่มืดและสภาพอากาศไม่เอื้ออำนวยและมีราคาไม่แพงนัก
ในทำนองเดียวกัน LiDAR ก็คือการตรวจจับ เทคโนโลยี ซึ่งมีหน้าที่หลักในการตรวจจับวัตถุและทำแผนที่ระยะทาง ซึ่งทำได้โดยการส่องสว่างเป้าหมายด้วยพัลส์แสง (ซึ่งมีช่วงความกว้างตั้งแต่ไม่กี่นาโนวินาทีไปจนถึงหลายไมโครวินาที) และการวัดลักษณะของสัญญาณสะท้อนกลับที่สะท้อน
ปัจจัยสำคัญในการดึงข้อมูลที่เป็นประโยชน์จากสัญญาณไฟที่ส่งคืน ได้แก่ กำลังพัลส์ เวลาไปกลับ การเปลี่ยนเฟส และความกว้างของพัลส์ แม้ว่าจะมีระบบ LiDAR หลายประเภท แต่ก็สามารถจัดกลุ่มได้เป็น XNUMX ประเภทตามประเภทการบังคับเลี้ยวด้วยลำแสง ได้แก่ LiDAR แบบกลไกและแบบออปติคัล
LiDAR เชิงกลอาศัยออปติกคุณภาพสูงและการประกอบแบบหมุนเพื่อสร้างขอบเขตการมองเห็นที่กว้าง (FoV) สูงสุด 360° อัตราส่วนสัญญาณต่อสัญญาณรบกวนที่เกี่ยวข้องนั้นค่อนข้างยอดเยี่ยมเมื่อเทียบกับ FoV แต่โซลูชันนั้นเทอะทะและหนัก ในทางกลับกัน Solid-state LiDAR นั้นไม่มีชิ้นส่วนกลไกที่หมุนได้ ทำให้มีความน่าเชื่อถือในระดับสูง แม้ว่า FoV จะลดลง แต่ก็ยังมีวิธีที่จะเอาชนะข้อจำกัดนี้ได้
นักวิเคราะห์ของ Yole คาดว่าตลาด ADAS จะมีมูลค่ามากกว่า 60 พันล้านดอลลาร์ในปี 2026 โดยมีอัตราการเติบโตต่อปี 6.5% จากปี 2020 ถึง 2026 ซึ่งเป็นส่วนหนึ่งของอุตสาหกรรมการเชื่อมต่อยานยนต์ ระบบอัตโนมัติ การแบ่งปัน/การสมัครสมาชิก และการใช้พลังงานไฟฟ้า (CASE) ที่ คาดว่าจะสูงถึง 318 พันล้านดอลลาร์ในปี 2035
ปัจจัยขับเคลื่อนหลักสำหรับการเติบโตนี้คือนวัตกรรมอย่างต่อเนื่องและการรวมฟังก์ชันใหม่เข้าด้วยกัน ตัวอย่างเช่น Yole กล่าวว่ามีบริษัท LiDAR มากกว่า 80 แห่งที่ก่อตั้งขึ้นนับตั้งแต่เปิดตัว LiDAR แบบเรียลไทม์ 3 มิติของ Velodyne ในปี 2005 และหลายแห่งก็ใช้เทคโนโลยีใหม่

คลิกเพื่อดูภาพขนาดใหญ่ (ที่มา: Yole)
เรดาร์โซลิดสเตตที่แท้จริง
หนึ่งในนวัตกรรมเหล่านั้นคือเทคโนโลยี LiDAR แบบโซลิดสเตตจาก ซีโนมาติเอ็กซ์ออกแบบมาสำหรับ ADAS และการขับขี่แบบอัตโนมัติ โซลูชันใหม่นี้ใช้แนวทางที่แตกต่างไปจากเดิมเมื่อเทียบกับ LiDAR แบบออปติคัลทั่วไป ซึ่งใช้การวัดแบบต่อเนื่องเพื่อส่งแสงเลเซอร์ไปในทิศทางเดียว ทำการวัด แล้วไปยังตำแหน่งถัดไป พวกเขาวัดและรับสถานการณ์โดยรอบทีละขั้นตอน
สามารถตรวจจับทั้งฉากได้ใน "แฟลชครั้งเดียว" โดยไม่มีข้อจำกัดของช่วงที่สั้นกว่าหรือกำลังสูง ด้วยช่วงที่เกิน 200 เมตรและการใช้พลังงานตามปกติ ต่างจากการสแกน LiDAR ที่จุดคลาวด์ที่มีความละเอียดสูงไม่จำเป็นต้องแก้ไขภายหลังสำหรับการแก้ไขช่องว่างเวลา ทำให้อัตราเฟรมสูงขึ้นมากและให้การแก้ไขที่ดีขึ้น
ผลที่ได้คือ LiDAR ของ XenomatiX ไม่จำเป็นต้องเคลื่อนที่เร็วมากเหมือนที่ระบบออปติคัลแบบ "ชี้และวัดค่า" ทั่วไปทำ เนื่องจากฉากถูกวัดโดยการส่งลำแสงทั้งหมดพร้อมกันโดยไม่ต้องทำการสแกน ระบบจึงมีเวลามากขึ้นในการประมวลผลตารางที่มีความละเอียดสูงของจุดวัด
ทุกวันนี้ ระบบ LiDAR จำนวนมากเป็นแบบกลไก แม้ว่าเทคโนโลยีโซลิดสเตตมีแนวโน้มสูง พวกเขาใช้หัวหมุนทำให้ได้สารละลายที่เทอะทะ หนัก และมีราคาแพง เพื่อเอาชนะข้อจำกัดเหล่านี้ เทคโนโลยีต่างๆ เช่น กระจกสั่น ได้ถูกนำมาใช้เพื่อลดขนาดของโซลูชัน อย่างไรก็ตาม มันยังคงเป็นอุปกรณ์กลไกอยู่บ้าง
XenomatiX ซึ่งก่อตั้งขึ้นในปี 2013 และมีสำนักงานใหญ่ในเมืองเลอเวน ประเทศเบลเยียม ได้แนะนำคำว่า "จริง" เพื่อระบุระบบ LiDAR แบบโซลิดสเตตที่สร้างขึ้นโดยใช้ สารกึ่งตัวนำ- แหล่งกำเนิดเลเซอร์และตัวตรวจจับ และไม่ต้องสแกนหรือเคลื่อนย้ายชิ้นส่วน แนวทางของบริษัทคือโซลูชันสำหรับการสแกนขณะเคลื่อนที่ เนื่องจากจะขจัดเวลาหน่วงที่เกิดจากเซ็นเซอร์สแกนขณะที่เคลื่อนผ่านรูปแบบการสแกน
แนวคิดนี้เหมาะอย่างยิ่งสำหรับการใช้งานในยานยนต์ เนื่องจากไม่จำเป็นต้องชดเชยการเคลื่อนไหว: ลำแสงทั้งหมดถูกส่งออกไปพร้อมกันทุกประการ ทำให้ได้จุดทั้งหมดพร้อมกันผ่านชัตเตอร์ทั่วโลก
การออกแบบ LiDAR แบบ True-solid-state XenoLidar-X มีประสิทธิภาพในทุกสถานการณ์ที่สภาพแสงและสภาพอากาศอาจแตกต่างกันไปในระดับที่ดี โซลูชันโซลิดสเตตรุ่นต่อไปของ XenomatiX มีลำแสงเลเซอร์ 15,000 ลำ ซึ่งฉายพร้อมกัน ซึ่งปรับปรุงความละเอียดได้ถึงระดับ 0.15° ในแนวนอนและแนวตั้ง สอดคล้องกับความต้องการของตลาดที่มีความต้องการสูงที่สุดในปัจจุบัน


XenoLidar-X LiDAR ของ XenomatiX (ที่มา: XenomatiX)
ใน LiDAR แบบโซลิดสเตต XenomatiX ใช้เลเซอร์เปล่งแสงพื้นผิวโพรงแนวตั้ง (VCSEL) ซึ่งเป็นแหล่งกำเนิดเลเซอร์พลังงานต่ำมากที่ให้ความทนทานและอายุการใช้งานที่ดีมาก ดีกว่าเลเซอร์ไดโอดแบบเดิมมาก
โซลูชันของบริษัทเรียกว่า 6D LiDAR ซึ่งหมายความว่ามีเอาต์พุตสองประเภทพร้อมโอเวอร์เลย์ที่สมบูรณ์แบบ อย่างแรกคือคลาวด์จุด ซึ่งเป็นเรขาคณิต 3 มิติที่รวมจุดเลเซอร์ที่ตรวจพบทั้งหมด ประการที่สองคือภาพจากกล้อง 2D ที่มองเห็นได้ สามารถมองได้ว่าเป็น LiDAR ที่มีกล้องในตัว หรือกล้องที่มีประสิทธิภาพ LiDAR และไม่มีข้อผิดพลาดเกี่ยวกับพารัลแลกซ์ ความพร้อมใช้งานของข้อมูลที่ซ้ำซ้อนช่วยให้เกิดการรวมเซ็นเซอร์ โดยให้ข้อมูลเสริมที่สนับสนุนการใช้งานด้านความปลอดภัย มิติที่หกคือการสะท้อนแสงของวัตถุ โดยพิจารณาจากปริมาณแสงเลเซอร์ที่ส่งคืน
เครื่องตรวจจับ CMOS ที่ออกแบบมาเป็นพิเศษ ซึ่งสามารถทำงานในโหมด 2D หรือ 3D ใช้อัลกอริธึม AI ที่เป็นกรรมสิทธิ์ในการประมวลผลภาพที่มองเห็นหรือคลาวด์จุด
XenomatiX เรียกมันว่า AI สี่มิติ ซึ่งหมายความว่ามันทำการจดจำรูปแบบในพื้นที่ 4 มิติ โดยที่พิกัด x, y และ z จะถูกรวมเข้ากับความเข้มของลำแสงเลเซอร์ที่สะท้อน เซ็นเซอร์ได้รับการออกแบบให้ทำงานเป็นเครื่องตรวจจับในโหมด 2D เมื่อปิดเลเซอร์ หากเปิดเลเซอร์ ระบบจะสามารถใช้พิกเซลเดียวกันเพื่อทำการวัด 3D และสร้าง 3D point cloud
Solid-state LiDAR ยังให้ความน่าเชื่อถือที่ยอดเยี่ยม ซึ่งเป็นปัจจัยสำคัญในการใช้งานยานยนต์ เวลาเฉลี่ยระหว่างความล้มเหลวนั้นดีมาก เนื่องจากไม่มีชิ้นส่วนที่เคลื่อนไหว การใช้ VCSEL (ซึ่งเป็นเลเซอร์ที่มีอายุการใช้งานยาวนาน) และความสมบูรณ์ของเทคโนโลยี CMOS
นอกจากการใช้งานในยานยนต์แล้ว เทคโนโลยี LiDAR ยังสามารถใช้สำหรับการทำแผนที่ทางอากาศและภูมิศาสตร์ 3 มิติ ระบบความปลอดภัยในโรงงาน กระสุนอัจฉริยะ และการวิเคราะห์ก๊าซ
ชิปเรดาร์ถ่ายภาพ 4 มิติ
การปรับปรุง "ดวงตา" ของ ADAS นั้นขยายไปไกลกว่า LiDAR เพื่อรวมเซ็นเซอร์ใหม่ที่สามารถจัดการกับสถานการณ์การขับขี่ที่ซับซ้อน หรือสิ่งที่เรียกว่าระดับ 4 หรือระบบอัตโนมัติระดับสูง
ในบรรดานักพัฒนาคือ เวย์ยาร์ อิมเมจจิ้งผู้เชี่ยวชาญด้านเซ็นเซอร์ของอิสราเอล แพลตฟอร์ม XRR ของบริษัทสำหรับ ADAS เป็นชิปเรดาร์ภาพ 4 มิติตัวเดียวที่มีระยะการทำงานสูงสุด 300 เมตร ชิปเรดาร์ยังมี 180˚ FoV ซึ่งทำงานโดยไม่ต้องใช้โปรเซสเซอร์ภายนอก
คุณลักษณะ 4D หมายถึงความสามารถของชิปในการวัดระยะทางและความเร็วสัมพัทธ์พร้อมกับมุมราบของวัตถุและความสูงของวัตถุที่สัมพันธ์กับระดับถนน
อาร์เรย์ MIMO 48 เสาอากาศรองรับแพลตฟอร์มใหม่ ซึ่งมีคุณสมบัติตรงตามมาตรฐาน AEC-Q100 และสอดคล้องกับ ASIL-B RFIC ได้รับการกล่าวขานว่าไม่จำเป็นต้องใช้อุปกรณ์ภายนอก เช่น เซ็นเซอร์ LiDAR ลดต้นทุนการเดินสาย การใช้พลังงาน และความพยายามในการผสานรวม
ชิป XRR แบบหลายช่วงทำงานในย่านความถี่เรดาร์ 76 ถึง 81 GHz และสามารถแยกความแตกต่างระหว่างสิ่งกีดขวางที่คงที่ เช่น วงเวียน ขอบถนน และยานพาหนะที่จอดอยู่ พร้อมกับยานพาหนะที่กำลังเคลื่อนที่และอันตรายอื่นๆ
ในสภาพแวดล้อมที่มีความเร็วต่ำ เช่น ที่จอดรถ ชิปจะสแกนบริเวณโดยรอบเพื่อหาคนเดินถนนและสิ่งกีดขวางโดยใช้การตรวจจับภาพเรดาร์ระยะสั้นพิเศษและระยะสั้น ในระยะที่ไกลขึ้น ชิปเรดาร์ช่วยให้สามารถใช้งาน ADAS ได้ เช่น ระบบควบคุมความเร็วอัตโนมัติแบบปรับได้ การตรวจจับจุดบอด การเตือนการชน การเตือนการจราจรข้ามถนน และการเบรกฉุกเฉินอัตโนมัติ


บอร์ดพร้อมชิป XRR ของ Vayyar (ที่มา: Vayyar Imaging)
เรดาร์ภาพ 4 มิติมีช่องเสมือนเกือบ 500 ช่อง (ซึ่งต่างจากช่องเดียวในเรดาร์แบบเดิม) เรดาร์ถ่ายภาพ 4 มิติแตกต่างจากกล้องและ LiDAR ในทุกสภาวะ รวมถึงหมอก ฝนตกหนัก และในเวลากลางคืน ช่วงที่ยาวกว่านั้นตรงตามข้อกำหนดสำหรับระบบอัตโนมัติของยานพาหนะในระดับที่สูงขึ้น เรดาร์ยังจับการเลื่อนดอปเปลอร์ ซึ่งจะตรวจจับว่าวัตถุกำลังเคลื่อนที่เข้าหายานพาหนะหรือห่างออกไป
เรดาร์ถ่ายภาพ 4 มิติไม่เหมือนกับกล้องและ LiDAR ตรงที่เรดาร์ถ่ายภาพ 300 มิติใช้การระบุตำแหน่งด้วยคลื่นเสียงสะท้อนและหลักการวัดเวลาของเที่ยวบินเพื่อสแกนบริเวณโดยรอบ นอกจากระยะ XNUMX เมตรแล้ว เรดาร์ยังทำงานได้ดีในพายุหิมะ เมื่อการถ่ายภาพทำได้ยากมาก
เซ็นเซอร์ 4D ใช้ตัวแปรเวลาเพื่อวิเคราะห์สภาพแวดล้อม 3 มิติสำหรับระดับความสูง ซึ่งจะช่วยตรวจจับและระบุวัตถุที่อยู่กับที่ตามถนนได้
ความสามารถในการสแกนสภาพแวดล้อมริมถนนรอบ ๆ รถด้วยความแม่นยำและความคมชัดที่เพิ่มขึ้นจะช่วยให้อุปกรณ์อิเล็กทรอนิกส์ออนบอร์ดสามารถตีความข้อมูลจำนวนมากขึ้น ซึ่งต้องใช้ความเร็วในการประมวลผลที่สูงขึ้นสำหรับแอปพลิเคชัน ADAS ผลที่ได้ Vayyar กล่าวว่ามีความน่าเชื่อถือมากขึ้น
เรดาร์บนชิปของบริษัทยังรวม DSP และ MCU ภายในสำหรับการประมวลผลสัญญาณแบบเรียลไทม์โดยไม่ต้องใช้ CPU ภายนอก