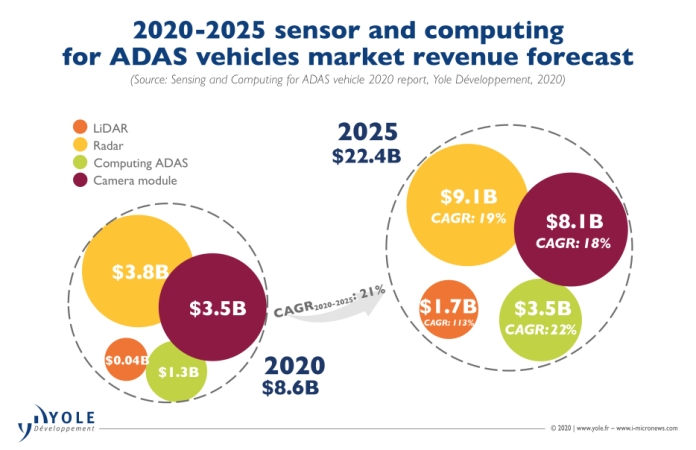
Hệ thống hỗ trợ lái xe tiên tiến (ADAS) là động lực lớn cho sự phát triển và đổi mới trong cảm biến thị trường. Thị trường cảm biến cho xe ADAS dự kiến sẽ đạt 22.4 tỷ đô la vào năm 2025, dẫn đầu là radar, theo Yole Development (Yole). Vào năm 2025, doanh thu từ radar dự kiến sẽ đạt 9.1 tỷ đô la và mặc dù là một thị trường tương đối nhỏ hiện nay, doanh thu của LiDAR được dự báo sẽ tăng lên 1.7 tỷ đô la. Mặc dù LiDAR trong ADAS chỉ chiếm 1.5% thị trường LiDAR ô tô và công nghiệp vào năm 2020, nhưng thị phần của ADAS dự kiến sẽ đạt 41% vào năm 2026, theo Yole.
Nói chung, radar hoạt động bằng cách truyền tín hiệu dội lại từ một vật thể để xác định sự hiện diện và phạm vi của nó. Bằng cách gửi tín hiệu ở một tần số cụ thể, hệ thống sau đó sẽ phân tích tần số trả về. Đối với ADAS, sự khác biệt giữa hai loại, bao gồm cả hiệu ứng Doppler có thể có, xác định vị trí, khoảng cách và tốc độ của chướng ngại vật.
Radar cũng có thể quét môi trường xung quanh. Do đó, nó đã trở thành một cảm biến quan trọng cho các ứng dụng như tránh va chạm vì nó hoạt động trong bóng tối và điều kiện thời tiết bất lợi và tương đối rẻ.
Tương tự, LiDAR là một cảm biến công nghệ có nhiệm vụ chính là phát hiện các vật thể và lập bản đồ khoảng cách của chúng. Điều này đạt được bằng cách chiếu sáng mục tiêu bằng một xung quang học (có độ rộng dao động từ vài nano giây đến vài micro giây) và đo các đặc tính của tín hiệu phản xạ trở lại.
Các yếu tố chính để trích xuất thông tin hữu ích từ các tín hiệu ánh sáng trả về là công suất xung, thời gian chu chuyển, độ lệch pha và độ rộng xung. Mặc dù có sẵn một số loại hệ thống LiDAR khác nhau, chúng có thể được nhóm lại thành hai loại đối với loại dẫn hướng chùm: LiDAR cơ học và quang học.
LiDAR cơ học dựa trên quang học cao cấp và cụm xoay để tạo ra trường nhìn rộng (FoV), lên đến 360 °. Tỷ lệ tín hiệu trên nhiễu liên quan là khá tuyệt vời so với FoV, nhưng giải pháp này cồng kềnh và nặng. Mặt khác, LiDAR thể rắn không có bộ phận cơ khí quay, mang lại độ tin cậy cao. Mặc dù FoV của họ bị giảm nhưng vẫn có cách để khắc phục hạn chế này.
Các nhà phân tích của Yole kỳ vọng rằng thị trường ADAS sẽ đạt hơn 60 tỷ đô la vào năm 2026, với tốc độ tăng trưởng kép hàng năm 6.5% từ năm 2020 đến năm 2026, như một phần của ngành kết nối ô tô, tự trị, chia sẻ / thuê bao và điện khí (CASE) vốn là dự báo đạt 318 tỷ USD vào năm 2035.
Động lực chính cho sự tăng trưởng này là liên tục đổi mới và tích hợp các chức năng mới. Ví dụ, Yole nói rằng hơn 80 công ty LiDAR đã được thành lập kể từ khi LiDAR 3D thời gian thực của Velodyne được giới thiệu vào năm 2005 và nhiều công ty trong số đó dựa trên công nghệ mới.

Click để xem ảnh rõ hơn. (Nguồn: Yole)
Radar trạng thái rắn thực sự
Một trong những đổi mới đó là công nghệ LiDAR trạng thái rắn từ XenomatiX, được thiết kế cho ADAS và lái xe tự động. Giải pháp mới này có một cách tiếp cận khác về cơ bản so với LiDAR quang học thông thường, sử dụng các phép đo tuần tự để gửi ánh sáng laser theo một hướng, thực hiện một phép đo và sau đó chuyển sang vị trí tiếp theo. Họ đo lường và thu nhận tình huống xung quanh theo cách từng bước.
Toàn bộ cảnh có thể được phát hiện trong “một lần chớp” mà không bị ràng buộc bởi phạm vi ngắn hơn hoặc công suất cao, với phạm vi vượt quá 200 mét và mức tiêu thụ điện năng bình thường. Không giống như quét LiDAR, các đám mây điểm có độ phân giải cao không cần xử lý hậu kỳ để hiệu chỉnh không gian thời gian, cho phép tốc độ khung hình cao hơn nhiều và cung cấp hiệu chỉnh tốt hơn.
Do đó, LiDAR của XenomatiX không phải di chuyển quá nhanh, như các hệ thống quang học “điểm và đo” thông thường. Vì hiện trường được đo bằng cách gửi tất cả các chùm tia cùng một lúc mà không thực hiện bất kỳ thao tác quét nào, hệ thống có nhiều thời gian hơn để xử lý lưới độ phân giải cao của các điểm đo.
Ngày nay, nhiều hệ thống LiDAR là cơ học, mặc dù có một xu hướng lớn đối với các công nghệ trạng thái rắn. Họ sử dụng đầu quay, dẫn đến các giải pháp cồng kềnh, nặng và đắt tiền. Để khắc phục những hạn chế này, các công nghệ như gương dao động đã được áp dụng để giảm tỷ lệ kích thước của giải pháp. Tuy nhiên, nó vẫn là một thiết bị máy móc.
XenomatiX, được thành lập vào năm 2013 và có trụ sở chính tại Leuven, Bỉ, đã đưa ra thuật ngữ “true” để xác định các hệ thống LiDAR trạng thái rắn được xây dựng bằng cách sử dụng Semiconductor- nguồn và máy dò laser dựa trên cơ sở và không có bộ phận quét hoặc chuyển động. Cách tiếp cận của công ty là một giải pháp để quét khi đang chuyển động, vì nó loại bỏ thời gian trễ do cảm biến quét gây ra khi chúng di chuyển qua mẫu quét của chúng.
Khái niệm này rất phù hợp cho các ứng dụng ô tô, vì nó loại bỏ sự cần thiết phải bù cho chuyển động: Tất cả các chùm tia được phát ra chính xác cùng một lúc, thu được tất cả các điểm cùng một lúc thông qua một màn trập toàn cầu.
Thiết kế của LiDAR thể rắn thật XenoLidar-X hiệu quả trong mọi tình huống mà điều kiện ánh sáng và thời tiết có thể thay đổi ở mức độ lớn. Giải pháp thể rắn thế hệ tiếp theo XenomatiX có 15,000 chùm tia laser, chiếu đồng thời, giúp cải thiện độ phân giải lên mức 0.15 ° theo chiều ngang và dọc, phù hợp với các yêu cầu thị trường khắt khe nhất hiện nay.


XenoLidar-X LiDAR của XenomatiX (Nguồn: XenomatiX)
Trong LiDAR trạng thái rắn của mình, XenomatiX sử dụng laser phát xạ bề mặt khoang dọc (VCSEL), đây là nguồn laser công suất cực thấp mang lại độ bền và tuổi thọ rất cao, tốt hơn nhiều so với laser diode truyền thống.
Các giải pháp của công ty được gọi là LiDAR 6D, có nghĩa là chúng cung cấp hai loại đầu ra với lớp phủ hoàn hảo. Đầu tiên là đám mây điểm, một dạng hình học 3D bao gồm tất cả các điểm laser được phát hiện. Thứ hai là hình ảnh camera 2D trực quan. Nó có thể được xem như là một LiDAR với một máy ảnh được tích hợp sẵn, hoặc một máy ảnh có hiệu suất LiDAR và không có lỗi thị sai. Sự sẵn có của dữ liệu dự phòng cho phép hợp nhất cảm biến, cung cấp thông tin bổ sung hỗ trợ các ứng dụng an toàn. Chiều thứ sáu là hệ số phản xạ của các vật thể, dựa trên lượng ánh sáng laser trả về.
Máy dò CMOS được thiết kế đặc biệt, có thể hoạt động ở chế độ 2D hoặc 3D, sử dụng các thuật toán AI độc quyền để xử lý hình ảnh trực quan hoặc đám mây điểm.
XenomatiX gọi nó là AI bốn chiều, có nghĩa là nó thực hiện nhận dạng mẫu trong không gian 4D, nơi các tọa độ x, y và z được kết hợp với cường độ của chùm tia laser phản xạ. Cảm biến được thiết kế để hoạt động như một máy dò ở chế độ 2D khi tia laser tắt. Nếu bật laser, hệ thống có thể sử dụng các pixel giống nhau để thực hiện các phép đo 3D và tạo ra đám mây điểm 3D.
LiDAR thể rắn cũng cung cấp độ tin cậy tuyệt vời, là yếu tố quan trọng trong các ứng dụng ô tô. Trên thực tế, thời gian trung bình giữa các lần hỏng hóc là rất tốt do không có các bộ phận chuyển động, việc sử dụng VCSELs (là loại laser có tuổi thọ cao) và sự trưởng thành của công nghệ CMOS.
Ngoài các ứng dụng ô tô, công nghệ LiDAR có thể được sử dụng để lập bản đồ địa lý và hàng không 3D, hệ thống an toàn trong nhà máy, đạn dược thông minh và phân tích khí đốt.
Chip radar hình ảnh 4D
Cải tiến “mắt” của ADAS còn mở rộng ra ngoài LiDAR để bao gồm các cảm biến mới có khả năng xử lý các tình huống lái xe phức tạp, hay còn gọi là Cấp độ 4, hoặc tự động hóa cao.
Trong số các nhà phát triển là Hình ảnh Vayyar, một chuyên gia cảm biến của Israel. Nền tảng XRR của công ty cho ADAS là một chip radar hình ảnh 4D duy nhất với phạm vi lên đến 300 mét. Chip radar cũng cung cấp một FoV 180˚, hoạt động mà không cần bộ xử lý bên ngoài.
Tính năng 4D đề cập đến khả năng của chip để đo khoảng cách và vận tốc tương đối cùng với phương vị của các đối tượng và chiều cao của chúng so với mặt đường.
Mảng MIMO 48 ăng-ten hỗ trợ nền tảng mới, cũng đủ tiêu chuẩn AEC-Q100 và tuân thủ ASIL-B. RFIC được cho là loại bỏ nhu cầu về các thiết bị bên ngoài như cảm biến LiDAR, giảm chi phí đi cáp, tiêu thụ điện năng và các nỗ lực tích hợp.
Chip XRR đa dải hoạt động trong dải tần rađa từ 76 đến 81 GHz và có thể phân biệt giữa các chướng ngại vật tĩnh như dải phân cách, lề đường và phương tiện đang đậu cùng với các phương tiện đang di chuyển và các mối nguy hiểm khác.
Trong các môi trường tốc độ thấp như bãi đậu xe, chip quét xung quanh để tìm người đi bộ và chướng ngại vật bằng cách sử dụng phát hiện hình ảnh radar tầm cực ngắn và tầm ngắn. Ở phạm vi xa hơn, chip radar cho phép các ứng dụng ADAS như điều khiển hành trình thích ứng, phát hiện điểm mù, cảnh báo va chạm, cảnh báo phương tiện cắt ngang và phanh khẩn cấp tự động.


Lên bảng với chip XRR của Vayyar (Nguồn: Vayyar Imaging)
Radar hình ảnh 4D cung cấp gần 500 kênh ảo (trái ngược với một kênh trong radar truyền thống). Không giống như camera và LiDAR, radar hình ảnh 4D hoạt động trong mọi điều kiện, bao gồm sương mù, mưa lớn và vào ban đêm. Phạm vi hoạt động xa hơn của nó đáp ứng các yêu cầu về mức độ tự động hóa cao hơn của phương tiện. Radar cũng ghi lại sự thay đổi của Doppler, giúp phát hiện xem một vật thể đang di chuyển về phía xe hay đi xa.
Ngoài ra, không giống như máy ảnh và LiDAR, radar hình ảnh 4D sử dụng định vị bằng tiếng vang và nguyên tắc đo thời gian bay để quét môi trường xung quanh. Cùng với tầm hoạt động 300 mét, radar cũng hoạt động tốt trong bão tuyết, khi việc chụp ảnh rất khó khăn.
Cảm biến 4D sử dụng các biến thời gian để phân tích môi trường 3D cho độ cao. Điều này có thể giúp phát hiện và xác định các vật thể đứng yên dọc theo đường.
Khả năng quét môi trường bên đường xung quanh xe với độ chính xác và độ nét ngày càng cao sẽ cho phép các thiết bị điện tử trên xe giải thích lượng dữ liệu lớn hơn, đòi hỏi tốc độ xử lý cao hơn cho ứng dụng ADAS. Vayyar cho biết kết quả là độ tin cậy cao hơn.
Radar-on-chip của công ty cũng kết hợp một DSP và MCU bên trong để xử lý tín hiệu thời gian thực mà không cần CPU bên ngoài.