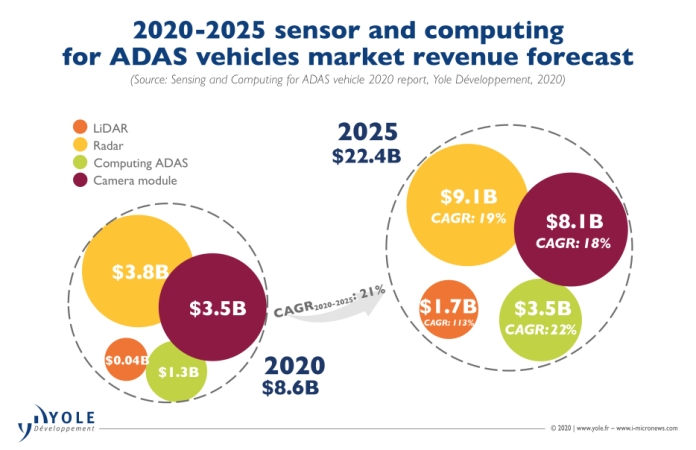
Os sistemas avançados de assistência ao motorista (ADAS) são um grande impulsionador para o crescimento e inovação no sensor mercado. O mercado de sensores para veículos ADAS deve chegar a US $ 22.4 bilhões em 2025, liderado por radares, de acordo com Desenvolvimento Yole (Yole). Em 2025, a receita do radar deve chegar a US $ 9.1 bilhões e, apesar de ser um mercado relativamente pequeno hoje, a receita do LiDAR deve crescer para US $ 1.7 bilhão. Embora o LiDAR em ADAS representasse apenas 1.5% do mercado automotivo e industrial de LiDAR em 2020, a participação do ADAS deve chegar a 41% em 2026, de acordo com Yole.
Em geral, o radar funciona transmitindo um sinal que ricocheteia em um objeto para determinar sua presença e alcance. Ao enviar um sinal em uma frequência específica, o sistema analisa a frequência de retorno. Para ADAS, a diferença entre os dois, incluindo o possível efeito Doppler, determina a posição, distância e velocidade dos obstáculos.
O radar também é capaz de rastrear o ambiente circundante. Portanto, tornou-se um sensor crítico para aplicações como prevenção de colisões porque funciona no escuro e em condições climáticas adversas e é relativamente barato.
Da mesma forma, LiDAR é um sensor tecnologia cuja principal tarefa é detectar objetos e mapear suas distâncias. Isto é conseguido iluminando um alvo com um pulso óptico (cuja largura varia de alguns nanossegundos a vários microssegundos) e medindo as características do sinal de retorno refletido.
Os principais fatores para extrair informações úteis dos sinais de luz retornados são potência de pulso, tempo de ida e volta, mudança de fase e largura de pulso. Embora vários tipos diferentes de sistemas LiDAR estejam disponíveis, eles podem ser agrupados em duas categorias com relação ao tipo de direção do feixe: LiDARs mecânicos e ópticos.
Um LiDAR mecânico depende de ótica de alto nível e um conjunto rotativo para criar um amplo campo de visão (FoV), de até 360 °. A relação sinal-ruído associada é excelente em relação ao FoV, mas a solução é volumosa e pesada. Os LiDARs de estado sólido, por outro lado, não apresentam peças mecânicas giratórias, proporcionando um alto grau de confiabilidade. Mesmo que seu FoV seja reduzido, existe uma maneira de superar essa limitação.
Os analistas da Yole esperam que o mercado de ADAS alcance mais de US $ 60 bilhões em 2026, com uma taxa de crescimento anual composta de 6.5% de 2020 a 2026, como parte da indústria de conectividade automotiva, autônoma, compartilhamento / assinatura e eletrificação (CASE) que é previsto chegar a US $ 318 bilhões em 2035.
Um fator chave para esse crescimento é a inovação contínua e a integração de novas funcionalidades. Como exemplo, Yole disse que mais de 80 empresas LiDAR foram estabelecidas desde que o LiDAR 3D em tempo real da Velodyne foi lançado em 2005, e muitas delas são baseadas em novas tecnologias.

Clique para uma imagem maior. (Fonte: Yole)
Radar de estado sólido verdadeiro
Uma dessas inovações é uma tecnologia LiDAR de estado sólido da XenomatX, projetado para ADAS e direção autônoma. Esta nova solução tem uma abordagem fundamentalmente diferente em relação aos LiDARs ópticos convencionais, que usam medições sequenciais para enviar luz laser em uma direção, fazer uma medição e, em seguida, passar para a próxima posição. Eles medem e adquirem o cenário circundante passo a passo.
Toda a cena pode ser detectada em “um flash” sem as restrições de menor alcance ou alta potência, com alcances além de 200 metros e consumo normal de energia. Ao contrário da digitalização de LiDARs, as nuvens de pontos de alta resolução não precisam de pós-tratamento para correção de espaço-tempo, permitindo uma taxa de quadros muito mais alta e fornecendo uma correção melhor.
Como resultado, o LiDAR do XenomatiX não precisa se mover muito rápido, como os sistemas ópticos convencionais de “apontar e medir”. Como a cena é medida enviando todos os feixes ao mesmo tempo, sem realizar nenhuma varredura, o sistema tem mais tempo para processar a grade de alta resolução dos pontos de medição.
Hoje, muitos sistemas LiDAR são mecânicos, embora haja uma grande tendência para as tecnologias de estado sólido. Eles usam cabeças giratórias, resultando em soluções volumosas, pesadas e caras. Para superar essas limitações, tecnologias como espelhos oscilantes foram adotadas para reduzir o tamanho da solução. No entanto, ainda permanece um dispositivo um tanto mecânico.
A XenomatiX, fundada em 2013 e sediada em Leuven, Bélgica, introduziu o termo "verdadeiro" para identificar sistemas LiDAR de estado sólido que são construídos usando um Semicondutoresfonte de laser e detector baseados em e sem digitalização ou partes móveis. A abordagem da empresa é uma solução para varredura em movimento, pois remove o tempo de atraso causado pelos sensores de varredura conforme eles se movem em seu padrão de varredura.
Este conceito é adequado para aplicações automotivas, pois elimina a necessidade de compensar o movimento: todos os feixes são enviados exatamente ao mesmo tempo, adquirindo todos os pontos ao mesmo tempo através de uma veneziana global.
O design do LiDAR de estado sólido verdadeiro XenoLidar-X é eficaz em todos os cenários em que a iluminação e as condições climáticas podem variar em grande grau. A solução de estado sólido de próxima geração XenomatiX apresenta 15,000 feixes de laser, projetando simultaneamente, o que melhora a resolução para um nível de 0.15 ° horizontal e vertical, em linha com os requisitos de mercado mais exigentes de hoje.


XenomatiX's XenoLidar-X LiDAR (Fonte: XenomatiX)
Em seus LiDARs de estado sólido, o XenomatiX usa lasers de emissão de superfície de cavidade vertical (VCSELs), que são fontes de laser de potência extremamente baixa que fornecem durabilidade e vida útil muito boas, muito melhores do que os lasers de diodo tradicionais.
As soluções da empresa são conhecidas como 6D LiDARs, o que significa que fornecem dois tipos de saídas com sobreposição perfeita. A primeira é uma nuvem de pontos, uma geometria 3D que inclui todos os pontos de laser detectados. A segunda é uma imagem visual de câmera 2D. Ele pode ser visto como um LiDAR com uma câmera inerentemente incorporada ou uma câmera com desempenho LiDAR e sem erro de paralaxe. A disponibilidade de dados redundantes permite a fusão de sensores, fornecendo informações complementares que suportam aplicações de segurança. A sexta dimensão é a refletividade dos objetos, com base na quantidade de luz laser retornada.
O detector CMOS especialmente projetado, que pode operar nos modos 2D ou 3D, usa algoritmos de IA proprietários para processar a imagem visual ou nuvem de pontos.
O XenomatiX o chama de IA quadridimensional, o que significa que realiza o reconhecimento de padrões em um espaço 4D, onde as coordenadas x, y e z são combinadas com a intensidade do feixe de laser refletido. O sensor é projetado para funcionar também como um detector no modo 2D quando o laser está desligado. Se o laser estiver ligado, o sistema pode usar os mesmos pixels para fazer medições 3D e gerar a nuvem de pontos 3D.
LiDARs de estado sólido também fornecem excelente confiabilidade, que é um fator chave em aplicações automotivas. O tempo médio entre falhas é, de fato, muito bom devido à ausência de partes móveis, ao uso de VCSELs (que são lasers com longa vida útil) e ao amadurecimento da tecnologia CMOS.
Além de aplicações automotivas, a tecnologia LiDAR pode ser usada para mapeamento 3D aéreo e geográfico, sistemas de segurança em fábricas, munição inteligente e análise de gás.
Chip de radar de imagem 4D
Melhorar os “olhos” do ADAS vai além do LiDAR para incluir novos sensores que são capazes de lidar com cenários complexos de direção, ou o que é chamado de Nível 4, ou alta automação.
Entre os desenvolvedores está Imagens Vayyar, um especialista israelense em sensores. A plataforma XRR da empresa para ADAS é um único chip de radar de imagem 4D com alcance de até 300 metros. O chip de radar também fornece um FoV de 180˚, operando sem a necessidade de um processador externo.
O recurso 4D se refere à capacidade do chip de medir a distância e a velocidade relativa junto com o azimute dos objetos e sua altura em relação ao nível da estrada.
Um array MIMO de 48 antenas suporta a nova plataforma, que também é qualificada para AEC-Q100 e compatível com ASIL-B. Diz-se que o RFIC elimina a necessidade de dispositivos externos, como sensores LiDAR, reduzindo os custos de cabeamento, consumo de energia e esforços de integração.
O chip XRR de alcance múltiplo opera nas bandas de radar de 76 a 81 GHz e pode diferenciar entre obstáculos estáticos como divisórias, meios-fios e veículos estacionados junto com veículos em movimento e outros perigos.
Em ambientes de baixa velocidade, como estacionamentos, o chip verifica os arredores em busca de pedestres e obstáculos usando a detecção de imagens de radar de curto e ultracurto alcance. Em distâncias mais longas, o chip de radar habilita aplicativos ADAS, como controle de cruzeiro adaptativo, detecção de ponto cego, aviso de colisão, alertas de tráfego cruzado e frenagem de emergência autônoma.


Placa com chip XRR de Vayyar (Fonte: Vayyar Imaging)
O radar de imagem 4D oferece cerca de 500 canais virtuais (ao contrário de um canal no radar tradicional). Ao contrário das câmeras e LiDARs, o radar de imagem 4D funciona em todas as condições, incluindo neblina, chuva forte e à noite. Seu alcance mais longo atende aos requisitos para níveis mais elevados de automação veicular. O radar também captura mudanças Doppler, que detectam se um objeto está se movendo em direção ao veículo ou se afastando.
Além disso, ao contrário das câmeras e LiDARs, o radar de imagem 4D usa a ecolocalização e o princípio da medição do tempo de voo para examinar seus arredores. Junto com o alcance de 300 metros, o radar também funciona bem em tempestades de neve, quando as imagens são muito difíceis.
O sensor 4D usa variáveis de tempo para analisar ambientes 3D para elevação. Isso pode ajudar a detectar e identificar objetos estacionários ao longo da estrada.
Ser capaz de escanear o ambiente à beira da estrada ao redor do veículo com precisão e definição crescentes permitiria que os eletrônicos de bordo interpretassem grandes quantidades de dados, exigindo velocidades de processamento mais altas para a aplicação ADAS. O resultado, disse Vayyar, é maior confiabilidade.
O radar-on-chip da empresa também incorpora um DSP interno e MCU para processamento de sinal em tempo real sem a necessidade de uma CPU externa.