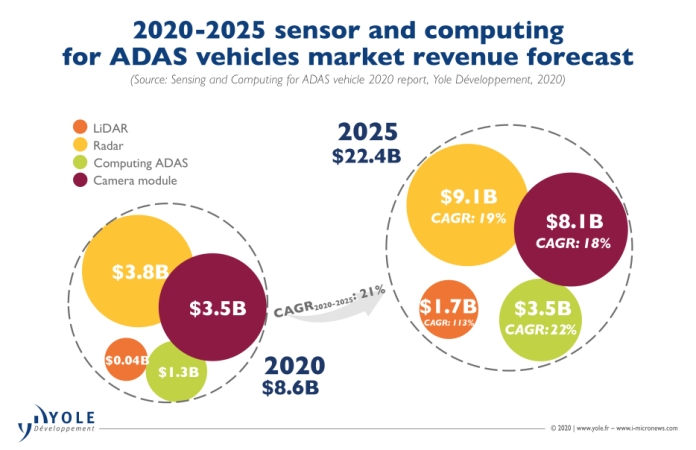
Sistem bantuan pengemudi tingkat lanjut (ADAS) adalah pendorong besar untuk pertumbuhan dan inovasi di Sensor pasar. Pasar sensor untuk kendaraan ADAS diperkirakan mencapai $ 22.4 miliar pada tahun 2025, dipimpin oleh radar, menurut Pengembangan Yole (Yole). Pada tahun 2025, pendapatan radar diperkirakan akan mencapai $9.1 miliar, dan meskipun pasarnya relatif kecil saat ini, pendapatan LiDAR diperkirakan akan tumbuh menjadi $1.7 miliar. Meskipun LiDAR di ADAS hanya mewakili 1.5% dari pasar LiDAR otomotif dan industri pada tahun 2020, pangsa ADAS diperkirakan akan mencapai 41% pada tahun 2026, menurut Yole.
Secara umum, radar bekerja dengan mentransmisikan sinyal yang memantul dari suatu objek untuk menentukan keberadaan dan jangkauannya. Dengan mengirimkan sinyal pada frekuensi tertentu, sistem kemudian menganalisis frekuensi kembali. Untuk ADAS, perbedaan antara keduanya, termasuk kemungkinan efek Doppler, menentukan posisi, jarak, dan kecepatan rintangan.
Radar juga mampu memindai lingkungan sekitar. Oleh karena itu, sensor ini menjadi sensor penting untuk aplikasi seperti penghindaran tabrakan karena berfungsi dalam kondisi cuaca gelap dan buruk serta relatif murah.
Demikian pula, LiDAR adalah penginderaan teknologi yang tugas utamanya adalah mendeteksi objek dan memetakan jaraknya. Hal ini dicapai dengan menerangi target dengan pulsa optik (yang lebarnya berkisar dari beberapa nanodetik hingga beberapa mikrodetik) dan mengukur karakteristik sinyal balik yang dipantulkan.
Faktor kunci untuk mengekstrak informasi yang berguna dari sinyal cahaya kembali adalah daya pulsa, waktu pulang pergi, pergeseran fasa, dan lebar pulsa. Meskipun beberapa jenis sistem LiDAR yang berbeda tersedia, mereka dapat dikelompokkan ke dalam dua kategori sehubungan dengan jenis kemudi balok: LiDAR mekanis dan optik.
LiDAR mekanis mengandalkan optik bermutu tinggi dan rakitan berputar untuk menciptakan bidang pandang yang luas (FoV), hingga 360°. Rasio signal-to-noise terkait cukup baik di atas FoV, tetapi solusinya besar dan berat. LiDAR solid-state, di sisi lain, tidak memiliki bagian mekanis yang berputar, memberikan tingkat keandalan yang tinggi. Meskipun FoV mereka berkurang, ada cara untuk mengatasi keterbatasan ini.
Analis Yole memperkirakan bahwa pasar ADAS akan mencapai lebih dari $60 miliar pada tahun 2026, dengan tingkat pertumbuhan tahunan gabungan 6.5% dari tahun 2020 hingga 2026, sebagai bagian dari industri konektivitas otomotif, otonom, berbagi/berlangganan, dan elektrifikasi (CASE) yang diperkirakan akan mencapai $318 miliar pada tahun 2035.
Penggerak utama untuk pertumbuhan ini adalah inovasi berkelanjutan dan integrasi fungsionalitas baru. Sebagai contoh, Yole mengatakan bahwa lebih dari 80 perusahaan LiDAR telah didirikan sejak LiDAR 3D real-time Velodyne diperkenalkan pada tahun 2005, dan banyak di antaranya didasarkan pada teknologi baru.

Klik untuk gambar yang lebih besar. (Sumber: Yole)
Radar solid-state sejati
Salah satu inovasi tersebut adalah teknologi LiDAR solid-state dari XenomatiX, dirancang untuk ADAS dan mengemudi otonom. Solusi baru ini mengambil pendekatan yang berbeda secara fundamental sehubungan dengan LiDAR optik konvensional, yang menggunakan pengukuran berurutan untuk mengirim sinar laser ke satu arah, melakukan pengukuran, dan kemudian beralih ke posisi berikutnya. Mereka mengukur dan memperoleh skenario di sekitarnya dengan cara selangkah demi selangkah.
Seluruh pemandangan dapat dideteksi dalam “satu kilatan” tanpa kendala jarak pendek atau daya tinggi, dengan rentang lebih dari 200 meter dan konsumsi daya normal. Tidak seperti pemindaian LiDAR, awan titik resolusi tinggi tidak memerlukan perawatan pasca untuk koreksi ruang-waktu, memungkinkan laju bingkai yang jauh lebih tinggi dan memberikan koreksi yang lebih baik.
Akibatnya, LiDAR XenomatiX tidak harus bergerak sangat cepat, seperti yang dilakukan sistem optik "titik dan ukur" konvensional. Karena pemandangan diukur dengan mengirimkan semua sinar secara bersamaan tanpa melakukan pemindaian apa pun, sistem memiliki lebih banyak waktu untuk memproses kisi titik pengukuran resolusi tinggi.
Saat ini, banyak sistem LiDAR bersifat mekanis, meskipun ada tren besar menuju teknologi solid-state. Mereka menggunakan kepala pemintal, menghasilkan solusi yang besar, berat, dan mahal. Untuk mengatasi keterbatasan ini, teknologi seperti cermin berosilasi telah diadopsi untuk memperkecil ukuran solusi. Namun, itu masih tetap merupakan perangkat yang agak mekanis.
XenomatiX, didirikan pada tahun 2013 dan berkantor pusat di Leuven, Belgia, memperkenalkan istilah "benar" untuk mengidentifikasi sistem LiDAR solid-state yang dibangun menggunakan Semikonduktorsumber dan detektor laser berbasis dan tanpa pemindaian atau bagian yang bergerak. Pendekatan perusahaan adalah solusi untuk pemindaian saat bergerak, karena menghilangkan jeda waktu yang disebabkan oleh sensor pemindaian saat mereka bergerak melalui pola pemindaiannya.
Konsep ini sangat cocok untuk aplikasi otomotif, karena menghilangkan kebutuhan untuk mengkompensasi gerakan: Semua sinar dikirim pada waktu yang sama, memperoleh semua titik pada waktu yang sama melalui rana global.
Desain XenoLidar-X true-solid-state LiDAR efektif dalam semua skenario di mana kondisi pencahayaan dan cuaca dapat sangat bervariasi. Solusi solid-state generasi XenomatiX menampilkan 15,000 sinar laser, memproyeksikan secara bersamaan, yang meningkatkan resolusi ke tingkat 0.15° horizontal dan vertikal, sejalan dengan kebutuhan pasar yang paling menuntut saat ini.


XenomatiX's XenoLidar-X LiDAR (Sumber: XenomatiX)
Dalam LiDAR solid-state, XenomatiX menggunakan laser pemancar permukaan rongga vertikal (VCSELs), yang merupakan sumber laser berdaya sangat rendah yang memberikan daya tahan dan masa pakai yang sangat baik, jauh lebih baik daripada laser dioda tradisional.
Solusi perusahaan dikenal sebagai LiDAR 6D, yang berarti mereka menyediakan dua jenis output dengan overlay sempurna. Yang pertama adalah titik awan, geometri 3D yang mencakup semua titik laser yang terdeteksi. Yang kedua adalah gambar kamera 2D visual. Ini dapat dilihat sebagai LiDAR dengan kamera bawaan, atau kamera dengan kinerja LiDAR dan tidak ada kesalahan paralaks. Ketersediaan data yang berlebihan memungkinkan penggabungan sensor, memberikan informasi pelengkap yang mendukung aplikasi keselamatan. Dimensi keenam adalah reflektifitas objek, berdasarkan jumlah sinar laser yang dikembalikan.
Detektor CMOS yang dirancang khusus, yang dapat beroperasi dalam mode 2D atau 3D, menggunakan algoritme AI eksklusif untuk memproses gambar visual atau point cloud.
XenomatiX menyebutnya AI empat dimensi, artinya ia melakukan pengenalan pola dalam ruang 4D, di mana koordinat x, y, dan z digabungkan dengan intensitas sinar laser yang dipantulkan. Sensor dirancang untuk juga berfungsi sebagai detektor dalam mode 2D saat laser dimatikan. Jika laser diaktifkan, sistem dapat menggunakan piksel yang sama untuk melakukan pengukuran 3D dan menghasilkan titik awan 3D.
LiDAR solid-state juga memberikan keandalan yang sangat baik, yang merupakan faktor kunci dalam aplikasi otomotif. Waktu rata-rata antara kegagalan sebenarnya sangat baik karena tidak adanya bagian yang bergerak, penggunaan VCSEL (yang merupakan laser dengan masa pakai yang lama), dan kematangan teknologi CMOS.
Selain aplikasi otomotif, teknologi LiDAR dapat digunakan untuk pemetaan udara dan geografis 3D, sistem keselamatan di pabrik, amunisi pintar, dan analisis gas.
Chip radar pencitraan 4D
Meningkatkan "mata" ADAS melampaui LiDAR untuk menyertakan sensor baru yang mampu menangani skenario mengemudi yang kompleks, atau yang disebut Level 4, atau otomatisasi tinggi.
Di antara pengembangnya adalah Pencitraan Vayyar, seorang spesialis sensor Israel. Platform XRR perusahaan untuk ADAS adalah chip radar pencitraan 4D tunggal dengan jangkauan hingga 300 meter. Chip radar juga menyediakan 180˚ FoV, beroperasi tanpa memerlukan prosesor eksternal.
Fitur 4D mengacu pada kemampuan chip untuk mengukur jarak dan kecepatan relatif bersama dengan azimut objek dan ketinggiannya relatif terhadap permukaan jalan.
Array MIMO 48-antena mendukung platform baru, yang juga memenuhi syarat AEC-Q100 dan ASIL-B. RFIC dikatakan menghilangkan kebutuhan akan perangkat eksternal seperti sensor LiDAR, mengurangi biaya pemasangan kabel, konsumsi daya, dan upaya integrasi.
Chip XRR multi-range beroperasi di pita radar 76 hingga 81 GHz dan dapat membedakan antara hambatan statis seperti pembatas, pembatas jalan, dan kendaraan yang diparkir bersama dengan kendaraan yang bergerak dan bahaya lainnya.
Di lingkungan berkecepatan rendah seperti tempat parkir, chip memindai lingkungan untuk pejalan kaki dan rintangan menggunakan deteksi pencitraan radar ultra-pendek dan jarak pendek. Pada jarak yang lebih jauh, chip radar memungkinkan aplikasi ADAS seperti kontrol jelajah adaptif, deteksi titik buta, peringatan tabrakan, peringatan lintas lalu lintas, dan pengereman darurat otonom.


Papan dengan chip XRR Vayyar (Sumber: Vayyar Imaging)
Radar pencitraan 4D menyediakan hampir 500 saluran virtual (berlawanan dengan satu saluran di radar tradisional). Tidak seperti kamera dan LiDAR, radar pencitraan 4D bekerja di semua kondisi, termasuk kabut, hujan lebat, dan di malam hari. Jangkauannya yang lebih panjang memenuhi persyaratan untuk tingkat otomatisasi kendaraan yang lebih tinggi. Radar juga menangkap pergeseran Doppler, yang mendeteksi apakah suatu objek bergerak ke arah kendaraan atau menjauh.
Selain itu, tidak seperti kamera dan LiDAR, radar pencitraan 4D menggunakan ekolokasi dan prinsip pengukuran waktu terbang untuk memindai sekelilingnya. Seiring dengan jangkauan 300 meter, radar juga berkinerja baik di badai salju, ketika pencitraan sangat sulit.
Sensor 4D menggunakan variabel waktu untuk menganalisis lingkungan 3D untuk ketinggian. Ini dapat membantu mendeteksi dan mengidentifikasi objek diam di sepanjang jalan.
Mampu memindai lingkungan pinggir jalan di sekitar kendaraan dengan presisi dan definisi yang meningkat akan memungkinkan elektronik on-board untuk menafsirkan data dalam jumlah yang lebih besar, yang membutuhkan kecepatan pemrosesan yang lebih tinggi untuk aplikasi ADAS. Hasilnya, kata Vayyar, adalah keandalan yang lebih besar.
Radar-on-chip perusahaan juga menggabungkan DSP internal dan MCU untuk pemrosesan sinyal waktu nyata tanpa memerlukan CPU eksternal.