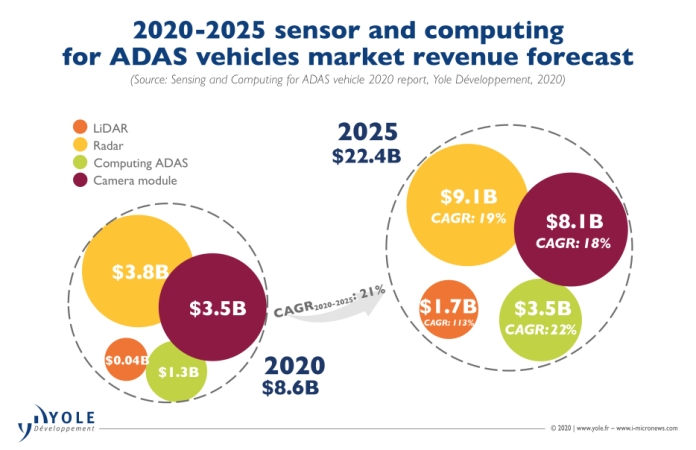
Sistem bantuan pemandu canggih (ADAS) adalah pemacu pertumbuhan dan inovasi dalam sensor pasar. Pasar sensor untuk kenderaan ADAS dijangka mencapai $ 22.4 miliar pada tahun 2025, yang dipimpin oleh radar, menurut Pembangunan Yole (Yole). Pada tahun 2025, pendapatan radar diharapkan mencapai $ 9.1 miliar, dan walaupun merupakan pasar yang relatif kecil hari ini, pendapatan LiDAR diperkirakan akan meningkat menjadi $ 1.7 miliar. Walaupun LiDAR di ADAS hanya mewakili 1.5% pasaran LiDAR automotif dan industri pada tahun 2020, bahagian ADAS dijangka mencapai 41% pada tahun 2026, menurut Yole.
Secara umum, radar berfungsi dengan memancarkan isyarat yang memantul objek untuk menentukan kehadiran dan jaraknya. Dengan menghantar isyarat pada frekuensi tertentu, sistem kemudian menganalisis frekuensi kembali. Bagi ADAS, perbezaan antara keduanya, termasuk kemungkinan kesan Doppler, menentukan kedudukan, jarak, dan kelajuan halangan.
Radar juga dapat mengimbas persekitaran di sekitarnya. Oleh itu, ia menjadi sensor kritikal untuk aplikasi seperti penghindaran perlanggaran kerana berfungsi dalam keadaan cuaca gelap dan buruk dan relatif murah.
Begitu juga, LiDAR ialah penderiaan teknologi yang tugas utamanya adalah untuk mengesan objek dan memetakan jaraknya. Ini dicapai dengan menerangi sasaran dengan nadi optik (yang lebarnya berjulat dari beberapa nanosaat hingga beberapa mikrosaat) dan mengukur ciri-ciri isyarat pulangan yang dipantulkan.
Faktor utama untuk mengekstrak maklumat berguna dari isyarat cahaya yang dikembalikan adalah kuasa nadi, masa perjalanan pergi balik, pergeseran fasa, dan lebar nadi. Walaupun terdapat beberapa jenis sistem LiDAR yang berbeza, mereka dapat dikelompokkan menjadi dua kategori berkenaan dengan jenis stereng rasuk: LiDAR mekanikal dan optik.
LiDAR mekanikal bergantung pada optik kelas tinggi dan pemasangan berputar untuk membuat bidang pandangan luas (FoV), hingga 360 °. Nisbah isyarat-ke-bising yang berkaitan cukup baik berbanding FoV, tetapi penyelesaiannya sangat besar dan berat. LiDAR keadaan pepejal, sebaliknya, tidak mempunyai bahagian mekanikal berputar, memberikan tahap kebolehpercayaan yang tinggi. Walaupun FoV mereka dikurangkan, ada cara untuk mengatasi batasan ini.
Penganalisis Yole menjangkakan bahawa pasaran ADAS akan mencapai lebih dari $ 60 bilion pada tahun 2026, dengan kadar pertumbuhan tahunan kompaun 6.5% dari tahun 2020 hingga 2026, sebagai sebahagian daripada industri automotif, autonomi, perkongsian / langganan, dan elektrik (CASE) yang ramalan akan mencapai $ 318 bilion pada tahun 2035.
Pemacu utama pertumbuhan ini adalah inovasi berterusan dan penyatuan fungsi baru. Sebagai contoh, Yole mengatakan bahawa lebih daripada 80 syarikat LiDAR telah ditubuhkan sejak LiDAR masa nyata 3D Velodyne diperkenalkan pada tahun 2005, dan banyak di antaranya didasarkan pada teknologi baru.

Klik untuk gambar yang lebih besar. (Sumber: Yole)
Radar keadaan pepejal sebenar
Salah satu inovasi tersebut ialah teknologi LiDAR keadaan pepejal dari XenomatiX, direka untuk ADAS dan pemanduan autonomi. Penyelesaian baru ini mengambil pendekatan yang berbeza secara mendasar sehubungan dengan LiDAR optik konvensional, yang menggunakan pengukuran berurutan untuk mengirim sinar laser dalam satu arah, melakukan pengukuran, dan kemudian beralih ke posisi berikutnya. Mereka mengukur dan memperoleh senario sekitarnya dengan langkah demi langkah.
Keseluruhan pemandangan dapat dikesan dalam "satu kilat" tanpa batasan jarak pendek atau daya tinggi, dengan jarak melebihi 200 meter dan penggunaan daya normal. Tidak seperti mengimbas LiDAR, awan titik beresolusi tinggi tidak memerlukan rawatan pasca untuk pembetulan ruang-waktu, yang membolehkan kadar bingkai yang jauh lebih tinggi dan memberikan pembetulan yang lebih baik.
Akibatnya, LiDAR XenomatiX tidak perlu bergerak sangat cepat, seperti yang dilakukan oleh sistem optik "titik dan ukuran" konvensional. Kerana pemandangan diukur dengan mengirim semua balok pada waktu yang sama tanpa melakukan pengimbasan, sistem memiliki lebih banyak waktu untuk memproses grid titik pengukuran beresolusi tinggi.
Hari ini, banyak sistem LiDAR bersifat mekanikal, walaupun terdapat kecenderungan besar terhadap teknologi keadaan pepejal. Mereka menggunakan kepala berputar, menghasilkan penyelesaian besar, berat, dan mahal. Untuk mengatasi keterbatasan ini, teknologi seperti cermin berayun telah diadopsi untuk menurunkan ukuran solusi. Walau bagaimanapun, ia tetap menjadi alat yang agak mekanikal.
XenomatiX, ditubuhkan pada tahun 2013 dan beribu pejabat di Leuven, Belgium, memperkenalkan istilah "benar" untuk mengenal pasti sistem LiDAR keadaan pepejal yang dibina menggunakan Semikonduktor- sumber dan pengesan laser berdasarkan dan tanpa mengimbas atau menggerakkan bahagian. Pendekatan syarikat adalah penyelesaian untuk mengimbas ketika dalam gerakan, kerana ia dapat menghilangkan kelewatan waktu yang disebabkan oleh sensor imbasan ketika mereka bergerak melalui corak pemindaian mereka.
Konsep ini sangat sesuai untuk aplikasi automotif, kerana menghilangkan keperluan untuk mengimbangi pergerakan: Semua balok dikirim pada waktu yang sama, memperoleh semua titik pada masa yang sama melalui penutup global.
Reka bentuk XenoLidar-X keadaan sebenar-pepejal LiDAR berkesan dalam semua senario di mana keadaan pencahayaan dan cuaca boleh berbeza-beza. Penyelesaian keadaan pepejal generasi seterusnya XenomatiX mempunyai 15,000 pancaran laser, mengunjurkan secara serentak, yang meningkatkan resolusi hingga tahap 0.15 ° mendatar dan menegak, sesuai dengan kehendak pasaran yang paling menuntut sekarang.


XenatiLidar-X LiDAR XenomatiX (Sumber: XenomatiX)
Dalam LiDAR keadaan pepejal, XenomatiX menggunakan laser pemancar permukaan rongga menegak (VCSEL), yang merupakan sumber laser berkuasa rendah yang memberikan ketahanan dan jangka hayat yang sangat baik, jauh lebih baik daripada laser dioda tradisional.
Penyelesaian syarikat dikenali sebagai 6D LiDAR, yang bermaksud mereka menyediakan dua jenis output dengan overlay yang sempurna. Yang pertama adalah titik titik, geometri 3D yang merangkumi semua titik laser yang dikesan. Yang kedua adalah gambar kamera 2D visual. Ia dapat dilihat sebagai LiDAR dengan kamera yang disertakan secara semula jadi, atau kamera dengan prestasi LiDAR dan tidak ada kesalahan paralaks. Ketersediaan data yang berlebihan memungkinkan penyatuan sensor, memberikan maklumat pelengkap yang menyokong aplikasi keselamatan. Dimensi keenam adalah pantulan objek, berdasarkan jumlah sinar laser yang dikembalikan.
Pengesan CMOS yang direka khas, yang dapat beroperasi dalam mod 2D atau 3D, menggunakan algoritma AI proprietari untuk memproses gambar visual atau titik titik.
XenomatiX menyebutnya AI empat dimensi, yang bermaksud ia melakukan pengecaman corak di ruang 4D, di mana koordinat x, y, dan z digabungkan dengan intensiti sinar laser yang dipantulkan. Sensor ini dirancang untuk berfungsi juga sebagai pengesan dalam mod 2D ketika laser dimatikan. Sekiranya laser dihidupkan, sistem dapat menggunakan piksel yang sama untuk melakukan pengukuran 3D dan menghasilkan awan titik 3D.
LiDAR keadaan pepejal juga memberikan kebolehpercayaan yang sangat baik, yang merupakan faktor utama dalam aplikasi automotif. Waktu min antara kegagalan sebenarnya, sangat baik kerana ketiadaan bahagian yang bergerak, penggunaan VCSEL (yang merupakan laser dengan jangka hayat yang panjang), dan kematangan teknologi CMOS.
Selain aplikasi automotif, teknologi LiDAR dapat digunakan untuk pemetaan udara 3D dan geografi, sistem keselamatan di kilang, peluru pintar, dan analisis gas.
Cip radar pengimejan 4D
Meningkatkan "mata" ADAS melampaui LiDAR untuk memasukkan sensor baru yang mampu menangani senario pemanduan yang kompleks, atau apa yang disebut Tahap 4, atau automasi tinggi.
Antara pembangunnya ialah Pengimejan Vayyar, pakar sensor Israel. Platform XRR syarikat untuk ADAS adalah cip radar pencitraan 4D tunggal dengan jarak hingga 300 meter. Cip radar juga menyediakan 180V FoV, beroperasi tanpa memerlukan pemproses luaran.
Ciri 4D merujuk kepada keupayaan cip untuk mengukur jarak dan halaju relatif bersama dengan azimuth objek dan ketinggiannya berbanding dengan permukaan jalan.
Susunan MIMO 48-antena menyokong platform baru, yang juga memenuhi syarat AEC-Q100 dan patuh ASIL-B. RFIC dikatakan dapat menghilangkan keperluan untuk peranti luaran seperti sensor LiDAR, mengurangi biaya pemasangan kabel, penggunaan tenaga, dan upaya integrasi.
Cip pelbagai jarak XRR beroperasi di jalur radar 76- hingga 81-GHz dan dapat membezakan antara halangan statik seperti pembahagi, pengekang, dan kenderaan yang diparkir bersama dengan kenderaan bergerak dan bahaya lain.
Dalam persekitaran berkelajuan rendah seperti tempat letak kereta, cip ini mengimbas sekitar pejalan kaki dan halangan menggunakan pengesanan pencitraan radar jarak pendek dan jarak pendek. Pada jarak yang lebih jauh, cip radar membolehkan aplikasi ADAS seperti kawalan pelayaran adaptif, pengesanan buta, peringatan perlanggaran, amaran lalu lintas silang, dan brek kecemasan autonomi.


Papan dengan cip XRR Vayyar (Sumber: Pengimejan Vayyar)
Radar pencitraan 4D menyediakan hampir 500 saluran maya (berbanding satu saluran dalam radar tradisional). Tidak seperti kamera dan LiDAR, radar pencitraan 4D berfungsi dalam semua keadaan, termasuk kabus, hujan lebat, dan pada waktu malam. Jangkauannya yang lebih panjang memenuhi keperluan untuk automasi kenderaan yang lebih tinggi. Radar juga menangkap pergeseran Doppler, yang mengesan sama ada objek bergerak ke arah kenderaan atau pergi.
Juga, tidak seperti kamera dan LiDAR, radar pencitraan 4D menggunakan echolocation dan prinsip pengukuran waktu penerbangan untuk mengimbas sekelilingnya. Seiring dengan jarak 300 meter, radar juga berfungsi dengan baik dalam ribut salji, ketika pengimejan sangat sukar.
Sensor 4D menggunakan pemboleh ubah masa untuk menganalisis persekitaran 3D untuk ketinggian. Ini dapat membantu mengesan dan mengenal pasti objek pegun di sepanjang jalan raya.
Dengan dapat mengimbas persekitaran pinggir jalan di sekitar kenderaan dengan peningkatan ketepatan dan definisi akan membolehkan elektronik dalam pesawat menafsirkan jumlah data yang lebih besar, memerlukan kelajuan pemprosesan yang lebih tinggi untuk aplikasi ADAS. Hasilnya, kata Vayyar, adalah kebolehpercayaan yang lebih besar.
Radar-on-chip syarikat juga menggabungkan DSP dan MCU dalaman untuk pemprosesan isyarat masa nyata tanpa memerlukan CPU luaran.