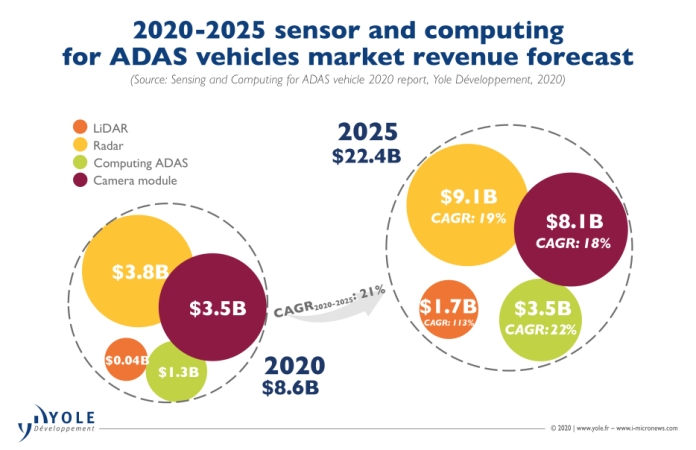
Geavanceerde rijhulpsystemen (ADAS) zijn een grote motor voor groei en innovatie in de sensor markt. De sensormarkt voor ADAS-voertuigen zal naar verwachting in 22.4 $ 2025 miljard bereiken, geleid door radars, volgens Yole ontwikkeling (Yole). In 2025 wordt verwacht dat de inkomsten uit radar $ 9.1 miljard zullen bereiken, en ondanks dat het vandaag een relatief kleine markt is, wordt verwacht dat de LiDAR-inkomsten zullen groeien tot $ 1.7 miljard. Hoewel LiDAR in ADAS in 1.5 slechts 2020% van de automobiel- en industriële LiDAR-markt vertegenwoordigde, wordt verwacht dat het ADAS-aandeel in 41 2026% zal bereiken, aldus Yole.
Over het algemeen werkt radar door een signaal uit te zenden dat van een object terugkaatst om zijn aanwezigheid en bereik te bepalen. Door een signaal op een bepaalde frequentie te sturen, analyseert het systeem vervolgens de retourfrequentie. Voor ADAS bepaalt het verschil tussen beide, inclusief het mogelijke Doppler-effect, de positie, afstand en snelheid van obstakels.
Radar kan ook de omgeving scannen. Daarom is het een kritieke sensor geworden voor toepassingen zoals het vermijden van botsingen, omdat het werkt in het donker en ongunstige weersomstandigheden en relatief goedkoop is.
Op dezelfde manier is LiDAR een detectie technologie wiens hoofdtaak het is om objecten te detecteren en hun afstanden in kaart te brengen. Dit wordt bereikt door een doel te verlichten met een optische puls (waarvan de breedte varieert van enkele nanoseconden tot enkele microseconden) en de kenmerken van het gereflecteerde retoursignaal te meten.
Sleutelfactoren voor het extraheren van nuttige informatie uit geretourneerde lichtsignalen zijn pulsvermogen, retourtijd, faseverschuiving en pulsbreedte. Hoewel er verschillende soorten LiDAR-systemen beschikbaar zijn, kunnen ze worden gegroepeerd in twee categorieën met betrekking tot het type straalbesturing: mechanische en optische LiDAR's.
Een mechanische LiDAR vertrouwt op hoogwaardige optica en een roterend geheel om een breed gezichtsveld (FoV) te creëren, tot wel 360°. De bijbehorende signaal-ruisverhouding is vrij uitstekend over de FoV, maar de oplossing is omvangrijk en zwaar. Solid-state LiDAR's hebben daarentegen geen draaiende mechanische onderdelen, wat een hoge mate van betrouwbaarheid biedt. Hoewel hun FoV is verminderd, is er een manier om deze beperking te overwinnen.
Yole-analisten verwachten dat de ADAS-markt in 60 meer dan $ 2026 miljard zal bereiken, met een samengesteld jaarlijks groeipercentage van 6.5% van 2020 tot 2026, als onderdeel van de automotive connectiviteit, autonoom, delen/abonnement en elektrificatie (CASE)-industrie die is verwacht tegen 318 $ 2035 miljard te bereiken.
Een belangrijke drijfveer voor deze groei is continue innovatie en integratie van nieuwe functionaliteit. Yole zei bijvoorbeeld dat er meer dan 80 LiDAR-bedrijven zijn opgericht sinds Velodyne's 3D realtime LiDAR in 2005 werd geïntroduceerd, en veel van hen zijn gebaseerd op nieuwe technologieën.

Klik voor een grotere afbeelding. (Bron: Yole)
Echte solid-state radar
Een van die innovaties is een solid-state LiDAR-technologie van: XenomatiX, ontworpen voor ADAS en autonoom rijden. Deze nieuwe oplossing heeft een fundamenteel andere benadering met betrekking tot conventionele optische LiDAR's, die sequentiële metingen gebruiken om laserlicht in één richting te sturen, een meting uit te voeren en vervolgens naar de volgende positie te gaan. Ze meten en verwerven stapsgewijs het omringende scenario.
De hele scène kan in "één flits" worden gedetecteerd zonder de beperkingen van een korter bereik of een hoog vermogen, met een bereik van meer dan 200 meter en een normaal stroomverbruik. In tegenstelling tot het scannen van LiDAR's, hebben de puntenwolken met hoge resolutie geen nabehandeling nodig voor tijd-ruimtecorrectie, waardoor een veel hogere framesnelheid en een betere correctie mogelijk is.
Als gevolg hiervan hoeft de LiDAR van XenomatiX niet zo snel te bewegen, zoals conventionele optische systemen met "aanwijzen en meten" doen. Omdat de scène wordt gemeten door alle bundels tegelijkertijd te verzenden zonder enige scan uit te voeren, heeft het systeem meer tijd om het raster van meetpunten met hoge resolutie te verwerken.
Tegenwoordig zijn veel LiDAR-systemen mechanisch, hoewel er een grote trend is in de richting van solid-state-technologieën. Ze gebruiken draaiende koppen, wat resulteert in omvangrijke, zware en dure oplossingen. Om deze beperkingen te overwinnen, zijn technologieën zoals oscillerende spiegels toegepast om de grootte van de oplossing te verkleinen. Het blijft echter nog steeds een enigszins mechanisch apparaat.
XenomatiX, opgericht in 2013 en met hoofdkantoor in Leuven, België, introduceerde de term "true" om solid-state LiDAR-systemen te identificeren die zijn gebouwd met behulp van een Halfgeleider-gebaseerde laserbron en detector en zonder scannende of bewegende delen. De aanpak van het bedrijf is een oplossing voor scannen terwijl u in beweging bent, omdat het de vertragingstijd wegneemt die wordt veroorzaakt door scansensoren terwijl ze door hun scanpatroon bewegen.
Dit concept is zeer geschikt voor toepassingen in de auto-industrie, omdat het niet nodig is om beweging te compenseren: alle bundels worden op exact hetzelfde moment uitgezonden en registreren alle punten tegelijkertijd via een globale sluiter.
Het ontwerp van de XenoLidar-X true-solid-state LiDAR is effectief in alle scenario's waarin licht- en weersomstandigheden sterk kunnen variëren. De XenomatiX solid-state oplossing van de volgende generatie beschikt over 15,000 laserstralen die gelijktijdig projecteren, wat de resolutie verbetert tot een niveau van 0.15° horizontaal en verticaal, in overeenstemming met de meest veeleisende marktvereisten van vandaag.


XenomatiX's XenoLidar-X LiDAR (Bron: XenomatiX)
In zijn solid-state LiDAR's maakt XenomatiX gebruik van verticale-cavity oppervlakte-emitterende lasers (VCSEL's), dit zijn laserbronnen met extreem laag vermogen die een zeer goede duurzaamheid en levensduur bieden, veel beter dan traditionele diodelasers.
De oplossingen van het bedrijf staan bekend als 6D LiDAR's, wat betekent dat ze twee soorten outputs bieden met een perfecte overlay. De eerste is een puntenwolk, een 3D-geometrie die alle gedetecteerde laservlekken omvat. De tweede is een visueel 2D-camerabeeld. Het kan worden gezien als een LiDAR met een ingebouwde camera, of een camera met LiDAR-prestaties en geen parallaxfout. De beschikbaarheid van redundante gegevens maakt sensorfusie mogelijk, wat aanvullende informatie oplevert die veiligheidstoepassingen ondersteunt. De zesde dimensie is de reflectiviteit van objecten, gebaseerd op de hoeveelheid teruggestuurd laserlicht.
De speciaal ontworpen CMOS-detector, die in 2D- of 3D-modus kan werken, maakt gebruik van eigen AI-algoritmen om het visuele beeld of de puntenwolk te verwerken.
XenomatiX noemt het vierdimensionale AI, wat betekent dat het patroonherkenning uitvoert in een 4D-ruimte, waar x-, y- en z-coördinaten worden gecombineerd met de intensiteit van de gereflecteerde laserstraal. De sensor is ontworpen om ook te werken als een detector in een 2D-modus wanneer de laser is uitgeschakeld. Als de laser is ingeschakeld, kan het systeem dezelfde pixels gebruiken om 3D-metingen te doen en de 3D-puntenwolk te genereren.
Solid-state LiDAR's bieden ook uitstekende betrouwbaarheid, wat een sleutelfactor is in automobieltoepassingen. De gemiddelde tijd tussen storingen is in feite zeer goed vanwege de afwezigheid van bewegende delen, het gebruik van VCSEL's (dit zijn lasers met een lange levensduur) en de volwassenheid van de CMOS-technologie.
Naast autotoepassingen kan de LiDAR-technologie worden gebruikt voor 3D-lucht- en geografische kaarten, veiligheidssystemen in fabrieken, slimme munitie en gasanalyse.
4D-beeldvormingsradarchip
Het verbeteren van de "ogen" van ADAS gaat verder dan LiDAR en omvat nieuwe sensoren die in staat zijn om complexe rijscenario's aan te kunnen, of wat Level 4 wordt genoemd, of hoge automatisering.
Onder de ontwikkelaars is Vayyar-beeldvorming, een Israëlische sensorspecialist. Het XRR-platform van het bedrijf voor ADAS is een enkele 4D-beeldradarchip met een bereik tot 300 meter. De radarchip biedt ook een FoV van 180˚ en werkt zonder dat een externe processor nodig is.
De 4D-functie verwijst naar het vermogen van de chip om afstand en relatieve snelheid te meten, samen met het azimut van objecten en hun hoogte ten opzichte van het wegniveau.
Een MIMO-array met 48 antennes ondersteunt het nieuwe platform, dat ook AEC-Q100-gekwalificeerd en ASIL-B-compatibel is. De RFIC elimineert de noodzaak voor externe apparaten zoals LiDAR-sensoren, waardoor de bekabelingskosten, het stroomverbruik en de integratie-inspanningen worden verminderd.
De multi-range XRR-chip werkt in de 76- tot 81-GHz radarbanden en kan onderscheid maken tussen statische obstakels zoals scheidingswanden, stoepranden en geparkeerde voertuigen, evenals bewegende voertuigen en andere gevaren.
In omgevingen met lage snelheden, zoals parkeerplaatsen, scant de chip de omgeving op voetgangers en obstakels met behulp van ultrakorte en korteafstandsradarbeelddetectie. Op grotere afstanden maakt de radarchip ADAS-toepassingen mogelijk, zoals adaptieve cruisecontrol, dodehoekdetectie, botsingswaarschuwing, kruisverkeerswaarschuwingen en autonoom noodremmen.


Bord met Vayyar's XRR-chip (Bron: Vayyar Imaging)
De 4D-beeldradar biedt bijna 500 virtuele kanalen (in tegenstelling tot één kanaal in traditionele radar). In tegenstelling tot camera's en LiDAR's werkt 4D-beeldradar onder alle omstandigheden, inclusief mist, hevige regen en 's nachts. Het grotere bereik voldoet aan de eisen voor hogere niveaus van voertuigautomatisering. Radar legt ook Doppler-verschuivingen vast, die detecteren of een object naar het voertuig toe of weg beweegt.
Ook gebruikt 4D-beeldradar, in tegenstelling tot camera's en LiDAR's, echolocatie en het principe van time-of-flight-meting om de omgeving te scannen. Naast een bereik van 300 meter presteert radar ook goed in sneeuwstormen, wanneer beeldvorming erg moeilijk is.
De 4D-sensor gebruikt tijdvariabelen om 3D-omgevingen te analyseren op hoogte. Dit kan helpen bij het detecteren en identificeren van stilstaande objecten langs de rijbaan.
Door de omgeving langs de weg rond het voertuig met toenemende precisie en definitie te kunnen scannen, zou de ingebouwde elektronica grotere hoeveelheden gegevens kunnen interpreteren, wat hogere verwerkingssnelheden vereist voor ADAS-toepassing. Het resultaat, zei Vayyar, is een grotere betrouwbaarheid.
De radar-op-chip van het bedrijf bevat ook een interne DSP en MCU voor realtime signaalverwerking zonder dat een externe CPU nodig is.