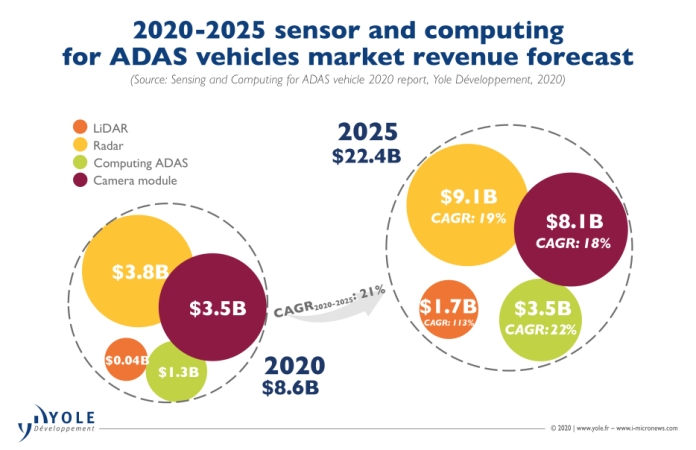
מערכות מתקדמות לסיוע לנהגים (ADAS) הן מניע גדול לצמיחה וחדשנות בתחום חיישן שׁוּק. שוק החיישנים לרכבי ADAS צפוי להגיע ל -22.4 מיליארד דולר בשנת 2025, בראשות מכ"מים, על פי Yole Development (Yole). בשנת 2025, הכנסות המכ"ם צפויות להגיע ל -9.1 מיליארד דולר, ולמרות שהן שוק קטן יחסית כיום, הכנסות LiDAR צפויות לגדול ל -1.7 מיליארד דולר. למרות ש- LiDAR ב- ADAS ייצג 1.5% בלבד משוק ה- LiDAR לרכב והתעשייה בשנת 2020, נתח ADAS צפוי להגיע ל -41% בשנת 2026, על פי Yole.
באופן כללי, המכ"ם פועל על ידי שידור אות שמקפיץ אובייקט כדי לקבוע את נוכחותו וטווחו. על ידי שליחת אות בתדר ספציפי, המערכת מנתחת את תדירות ההחזרה. עבור ADAS, ההבדל בין השניים, כולל אפקט הדופלר האפשרי, קובע את המיקום, המרחק והמהירות של המכשולים.
מכ"ם מסוגל לסרוק גם את הסביבה שמסביב. לכן, הוא הפך לחיישן קריטי ליישומים כמו הימנעות מהתנגשות מכיוון שהוא פועל בתנאי מזג אוויר חשוכים ולא נוחים וזול יחסית.
באופן דומה, LiDAR הוא חישה טֶכנוֹלוֹגִיָה שמשימתו העיקרית היא לזהות עצמים ולמפות את המרחקים שלהם. הדבר מושג על ידי הארת מטרה בפולס אופטי (שרוחבו נע בין כמה ננו-שניות למספר מיקרו-שניות) ומדידת המאפיינים של אות ההחזרה המוחזר.
גורמי מפתח לחילוץ מידע שימושי מאותות אור שהוחזרו הם כוח הדופק, זמן הלוך ושוב, הזזת פאזה ורוחב הדופק. למרות שיש מספר סוגים שונים של מערכות LiDAR, ניתן לחלק אותן לשתי קטגוריות ביחס לסוג ההיגוי הקורה: מכניות LiDAR מכניות ואופטיות.
LiDAR מכני מסתמך על אופטיקה ברמה גבוהה ומכלול מסתובב ליצירת שדה ראייה רחב (FoV), עד 360 °. יחס האות לרעש הקשור הוא די מצוין ביחס ל- FoV, אך הפתרון מגושם וכבד. מצבי LiDAR, לעומת זאת, אינם כוללים חלקים מכניים מסתובבים, המספקים רמה גבוהה של אמינות. למרות שה- FoV שלהם מופחת, יש דרך להתגבר על מגבלה זו.
אנליסטים של Yole צופים כי שוק ADAS יגיע ליותר מ -60 מיליארד דולר בשנת 2026, עם שיעור צמיחה שנתי מורכב של 6.5% מ -2020 עד 2026, כחלק מתעשיית הקישוריות, האוטונומית, השיתוף/המנוי והחשמול (CASE) שהיא צפוי להגיע ל -318 מיליארד דולר עד 2035.
גורם מפתח לצמיחה זו הוא חדשנות מתמשכת ושילוב של פונקציונליות חדשה. כדוגמה, Yole אמר כי יותר מ -80 חברות LiDAR הוקמו מאז הוצגה LiDAR בזמן אמת 3D של וולודי בשנת 2005, ורבות מהן מבוססות על טכנולוגיות חדשות.

לחץ לתמונה גדולה יותר. (מקור: Yole)
מכ"ם אמיתי של מצב מוצק
אחד החידושים הוא טכנולוגיית LiDAR ממצב מוצק XenomatiX, המיועד ל ADAS ולנהיגה אוטונומית. פתרון חדש זה נוקט בגישה שונה מהותית ביחס ל- LiDAR אופטי קונבנציונאלי, שמשתמשים במדידות עוקבות כדי לשלוח אור לייזר בכיוון אחד, לבצע מדידה ולאחר מכן לעבור למיקום הבא. הם מודדים ורוכשים את התרחיש שמסביב באופן צעד אחר צעד.
ניתן לזהות את כל הסצנה ב"הבזק אחד "ללא מגבלות של טווח קצר יותר או הספק גבוה, עם טווחים שמעבר ל -200 מטרים וצריכת חשמל רגילה. שלא כמו סריקת LiDAR, ענני הנקודות ברזולוציה גבוהה אינן זקוקות לאחר טיפול לתיקון מרחב-זמן, המאפשרות קצב מסגרות גבוה בהרבה ומתן תיקון טוב יותר.
כתוצאה מכך, ה- LiDAR של XenomatiX לא צריך לנוע מהר במיוחד, כפי שעושות מערכות אופטיות "נקודה ומדידה" רגילות. מכיוון שהסצנה נמדדת על ידי שליחת כל הקורות בו זמנית מבלי לבצע כל סריקה, למערכת יש יותר זמן לעבד את רשת נקודות המדידה ברזולוציה גבוהה.
כיום, מערכות LiDAR רבות הן מכניות, אם כי יש מגמה גדולה לטכנולוגיות מצב מוצק. הם משתמשים בראשים מסתובבים, וכתוצאה מכך פתרונות מגושמים, כבדים ויקרים. כדי להתגבר על מגבלות אלה, אומצו טכנולוגיות כגון מראות מתנדנדות כדי להקטין את גודל הפתרון. עם זאת, הוא עדיין נשאר מכשיר מעט מכני.
XenomatiX, שנוסדה בשנת 2013 ובסיסה בלובן, בלגיה, הציגה את המונח "נכון" לזיהוי מערכות LiDAR במצב מוצק שנבנות באמצעות סמיקונדקטור-מקור גלאי ולייזר מבוסס וללא סריקה או חלקים נעים. גישת החברה היא פתרון לסריקה תוך כדי תנועה, מכיוון שהיא מסירה את זמן ההשהיה הנגרם על ידי חיישני סריקה כשהם עוברים דרך תבנית הסריקה שלהם.
רעיון זה מתאים היטב ליישומי רכב, מכיוון שהוא מבטל את הצורך לפצות על תנועה: כל הקורות נשלחות החוצה באותו הזמן בדיוק, ורוכשות את כל הנקודות בו זמנית באמצעות תריס עולמי.
העיצוב של ה- LiDAR של מצב XenoLidar-X אמיתי מוצק יעיל בכל התרחישים בהם תנאי התאורה ומזג האוויר יכולים להשתנות במידה רבה. פתרון הדור הבא של מצב ה- XenomatiX כולל 15,000 קרני לייזר המוקרנות במקביל, מה שמשפר את הרזולוציה לרמה של 0.15 ° אופקי ואנכי, בהתאם לדרישות השוק התובעניות ביותר כיום.


XenoLidar-X LiDAR של XenomatiX (מקור: XenomatiX)
במצבי LiDAR של מצב מוצק, XenomatiX משתמשת בלייזר פולט פני שטח חלל אנכי (VCSEL), שהם מקורות לייזר בעלי הספק נמוך במיוחד המספקים עמידות וחיים טובים מאוד, הרבה יותר טובים מאשר לייזרים דיודות מסורתיות.
הפתרונות של החברה ידועים בשם 6D LiDARs, כלומר הם מספקים שני סוגים של יציאות עם כיסוי מושלם. הראשון הוא ענן נקודה, גיאומטריה תלת -ממדית הכוללת את כל כתמי הלייזר שזוהו. השנייה היא תמונת מצלמה דו -ממדית חזותית. אפשר לראות את זה כ- LiDAR עם מצלמה משולבת מטבעה, או מצלמה עם ביצועי LiDAR וללא שגיאה במקביל. זמינות הנתונים המיותרים מאפשרת מיזוג חיישנים, ומספקת מידע משלים התומך ביישומי בטיחות. הממד השישי הוא רפלקטיביות של אובייקטים, המבוססת על כמות אור הלייזר המוחזר.
גלאי ה- CMOS שתוכנן במיוחד, שיכול לפעול במצבי 2D או 3D, משתמש באלגוריתמים AI קנייניים לעיבוד התמונה החזותית או ענן הנקודות.
XenomatiX מכנה אותו AI בתלת מימד, כלומר מבצע זיהוי תבניות במרחב 4D, שבו קואורדינטות x, y ו- z משולבות עם עוצמת קרן הלייזר המוחזרת. החיישן נועד לפעול גם כגלאי במצב דו -ממדי כאשר הלייזר כבוי. אם הלייזר מופעל, המערכת יכולה להשתמש באותם הפיקסלים לביצוע מדידות תלת -ממדיות וליצור ענן הנקודות התלת -ממדי.
מצבי LiDAR גם מספקים אמינות מצוינת, המהווה גורם מפתח ביישומי רכב. הזמן הממוצע בין כישלון הוא למעשה טוב מאוד בשל היעדר חלקים נעים, השימוש ב- VCSEL (שהם לייזרים עם אורך חיים ארוך) ובגרות טכנולוגיית ה- CMOS.
בנוסף ליישומי רכב, ניתן להשתמש בטכנולוגיית LiDAR למיפוי תלת -ממדי אווירי וגיאוגרפי, מערכות בטיחות במפעלים, תחמושת חכמה וניתוח גז.
שבב מכ"ם הדמיה 4D
שיפור "העיניים" של ADAS חורג מעבר ל- LiDAR כדי לכלול חיישנים חדשים המסוגלים להתמודד עם תרחישי נהיגה מורכבים, או מה שנקרא רמה 4, או אוטומציה גבוהה.
בין המפתחים נמצא וייאר הדמיה, מומחה חיישנים ישראלי. פלטפורמת ה- XRR של החברה ל- ADAS היא שבב מכ"ם הדמיה 4D עם טווח של עד 300 מטרים. שבב המכ"ם מספק גם 180 ˚ FoV, הפועל ללא צורך במעבד חיצוני.
תכונת 4D מתייחסת ליכולת השבב למדוד מרחק ומהירות יחסית יחד עם אזימוט של עצמים וגובהם ביחס למפלס הכביש.
מערך MIMO עם 48 אנטנות תומך בפלטפורמה החדשה, שגם היא תואמת AEC-Q100 ותואמת ASIL-B. אומרים כי ה- RFIC מבטל את הצורך בהתקנים חיצוניים כגון חיישני LiDAR, הפחתת עלויות הכבלים, צריכת החשמל ומאמצי האינטגרציה.
שבב ה- XRR רב-טווח פועל ברצועות המכ"ם של 76 עד 81 גיגה-הרץ ויכול להבדיל בין מכשולים סטטיים כגון מפרידים, מדרכות ורכבים חונים יחד עם כלי רכב נעים וסכנות אחרות.
בסביבות מהירות נמוכה כמו חניונים, השבב סורק את הסביבה לאיתור הולכי רגל ומכשולים באמצעות זיהוי הדמיית מכ"ם קצר במיוחד וקצר. בטווחים ארוכים יותר, שבב המכ"ם מאפשר יישומי ADAS כגון בקרת שיוט אדפטיבית, זיהוי כתמים עיוורים, התרעת התנגשות, התראות צולבות ובלמים חירום אוטונומיים.


לוח עם שבב ה- XRR של Vayyar (מקור: Vayyar Imaging)
מכ"ם הדמיה 4D מספק כמעט 500 ערוצים וירטואליים (בניגוד לערוץ אחד במכ"ם המסורתי). שלא כמו מצלמות ומצלמות LiDAR, מכ"ם הדמיה 4D פועל בכל התנאים, כולל ערפל, גשם כבד ובלילה. הטווח הארוך יותר שלו עומד בדרישות לרמות גבוהות יותר של אוטומציה לרכב. מכ"ם לוכד גם משמרות דופלר, שמזהות אם עצם נע לכיוון הרכב או משם.
כמו כן, בניגוד למצלמות ומצלמות LiDAR, מכ"ם הדמיה 4D משתמש באקולוקציה ובעיקרון מדידת זמן הטיסה כדי לסרוק את סביבתו. יחד עם טווח של 300 מטר, המכ"ם מתפקד היטב גם בסופות שלג, כאשר ההדמיה קשה מאוד.
חיישן 4D משתמש במשתני זמן לניתוח סביבות תלת מימד לגובה. זה יכול לעזור לזהות ולזהות עצמים נייחים לאורך הכביש.
היכולת לסרוק את סביבת הכביש סביב הרכב עם דיוק והגדרה הולכים וגוברים תאפשר לאלקטרוניקה המשולבת לפרש כמויות נתונים גדולות יותר, הדורשות מהירות עיבוד גבוהות יותר ליישום ADAS. התוצאה, אמרה ויאר, היא אמינות רבה יותר.
המכ"ם-על-שבב של החברה משלב גם DSP פנימי ו- MCU לעיבוד אותות בזמן אמת ללא צורך במעבד חיצוני.