Vorteile von bürstenlosen Gleichstrommotoren (BLDC) in der Robotik und Automatisierung
Bürstenlose Gleichstrommotoren (BLDC) bieten zahlreiche Vorteile gegenüber Bürstenmotoren, was sie zu einer bevorzugten Wahl in Robotik- und Automatisierungsanwendungen macht. Während BLDC-Motoren ein Steuerungssystem zur präzisen Drehzahl- und Drehmomentregelung erfordern, überwiegen ihre Vorteile die zusätzliche Komplexität. Zu den Hauptvorteilen von BLDC-Motoren gehören:
- Verbesserte Effizienz: BLDC-Motoren bieten eine höhere Energieeffizienz, ein entscheidender Faktor angesichts des erheblichen weltweiten Stromverbrauchs von Elektromotoren.
- Präzise Steuerung: BLDC-Motoren ermöglichen eine präzise Drehzahl- und Drehmomentsteuerung und ermöglichen so eine optimierte Leistung unter wechselnden Lastbedingungen. Dieses Maß an Kontrolle ist in der Robotik und Automatisierung von entscheidender Bedeutung, wo präzise Bewegungen und Reaktionen erforderlich sind.
- Verbesserte Haltbarkeit: Im Gegensatz zu Bürstenmotoren, bei denen aufgrund von Bürstenverschleiß und Lichtbogenbildung ein Leistungsabfall auftritt, behalten BLDC-Motoren ihre Leistung im Laufe der Zeit bei. Diese Langlebigkeit trägt zur Gesamtzuverlässigkeit und Lebensdauer von Robotersystemen bei.
- Geräuscharmer Betrieb: BLDC-Motoren arbeiten leise und minimieren so die Geräuschentwicklung bei Roboteranwendungen. Diese Eigenschaft ist besonders wichtig in Umgebungen, in denen eine Reduzierung des Geräuschpegels für ein verbessertes Benutzererlebnis oder zur Einhaltung gesetzlicher Standards erforderlich ist.
- Reduzierte elektromagnetische Interferenzen (EMI): BLDC-Motoren erzeugen geringere elektromagnetische Interferenzen und sorgen so für minimale Störungen anderer elektronischer Komponenten oder Kommunikationssysteme innerhalb von Robotersystemen.
- Kompaktes und leichtes Design: BLDC-Motoren sind kompakt und leicht und eignen sich daher für Anwendungen mit begrenztem Platz oder Gewichtsbeschränkungen. Dieser Vorteil erleichtert die Integration von BLDC-Motoren in verschiedene Robotersysteme, von kleinen Geräten bis hin zu großen industriellen Automatisierungsanlagen.
Aufgrund ihrer überlegenen Effizienz, präzisen Steuerung, Langlebigkeit, ihres geräuscharmen Betriebs, ihrer reduzierten elektromagnetischen Störungen und ihres kompakten Designs sind BLDC-Motoren in einer Vielzahl von Anwendungen unverzichtbar geworden. Von Computerfestplatten bis hin zu Elektrofahrzeugen und von der kleinen Robotik bis hin zur großen industriellen Automatisierung treiben BLDC-Motoren weiterhin Fortschritte in Bezug auf Effizienz und Leistung in der gesamten Robotik- und Automatisierungsbranche voran.


Ein Nachteil von BLDC-Motoren ist die komplizierte Steuerung Schaltung und der damit einhergehende Kostenanstieg. Für die elektronische Schalttechnik sind präzise getaktete elektrische Signale erforderlich, die Treiberschaltungen erfordern, die diese erzeugen können.
Dennoch haben moderne Entwickler heute den Vorteil, dass Leistungsgeräte, die speziell für BLDC-Motortreiber entwickelt wurden, in großem Umfang kommerziell verfügbar sind. Diese Geräte gibt es in eigenständiger Form oder integriert mit einem Mikrocontroller (dem Controller), was den Designprozess vereinfacht und die Gesamtkosten der Lösung senkt.
Die Controller
Neben der Regulierung von Geschwindigkeit und Drehmoment spielt es eine entscheidende Rolle beim Einleiten, Anhalten und Umkehren der Motordrehung. Es kann Rotorpositionsinformationen auf zwei Arten erfassen: Sensor-Typ-Steuerung, bei der der Controller diese Daten direkt empfängt, oder sensorlose Steuerung, bei der der Controller die Position mithilfe geeigneter Algorithmen ableitet, die auf Firmware- oder Hardware-Ebene implementiert sind. Die an die Leistungs-MOSFETs angelegten elektrischen Signale werden hinsichtlich Amplitude und Dauer anhand der Rotorposition bestimmt.
Sensorgesteuerte BLDC-Motoren werden häufig in Anwendungen eingesetzt, bei denen ein Starten des Motors unter Last erforderlich ist, da die genaue Position des Motors sofort bekannt ist. Für die Positionsbestimmung gibt es mehrere Methoden:
- Hall-Effekt-Magnetsensoren: Diese Sensoren sind äußerst belastbar und können auch unter rauen Bedingungen, wie z. B. bei Automobilanwendungen, effektiv arbeiten.
- Drehgeber: Diese Geräte wandeln mechanische Bewegungen in elektrische Impulse um und liefern wichtige Daten wie Position, Geschwindigkeit und Richtung. Abhängig von Technologie Encoder können optisch, kapazitiv oder magnetisch sein.
- Sensoren mit variabler Reluktanz: Diese Sensoren erzeugen ein elektrisches Signal, das der Verschiebung eines magnetisch leitenden oder permeablen Objekts relativ zu einer Spule entspricht.

Der sensorlose Controller verwendet eine Technik zur Schätzung der gegenelektromotorischen Kraft (EMF), die in den Statorwicklungen durch den rotierenden Anker erzeugt wird, um die aktuelle Position des Rotors zu erfassen. Durch Messung der Gegen-EMK kann der Controller die Position des Rotors bestimmen, wobei eine höhere Gegen-EMK auf einen näheren Magneten hinweist.
Der Entwurf bzw. die Auswahl des Controllers ist eine kritische Aufgabe, die äußerste Genauigkeit erfordert. Die Hauptfunktionen eines Motorcontrollers sind folgende:
- Geschwindigkeits- und Richtungsregelung: Der Controller regelt die Geschwindigkeit des Motors und steuert seine Drehrichtung.
- Drehmomentregelung: Durch Überwachung der angelegten Last ermittelt die Steuerung den geeigneten Drehmomentwert, um eine optimale Motorleistung zu erzielen.
- Verwaltung der Start- und Stoppphasen: Die Steuerung startet und stoppt den Motor schrittweise und folgt dabei präzisen Beschleunigungs- und Verzögerungsprofilen.
- Schutz vor Überspannung oder Überstrom: Der Controller schützt den Motor, indem er Überspannungen erkennt und darauf reagiert Spannung oder aktuelle Niveaus.
- Optimierung der Motoreffizienz: Der Controller verwaltet verschiedene Motorparameter, um die Gesamteffizienz zu maximieren.
In der Vergangenheit wurden Controller aus diskreten Komponenten zusammen mit einem Mikrocontroller gebaut, der die Firmware mit den Steueralgorithmen ausführte. Der aktuelle Trend geht jedoch zu hochintegrierten Lösungen, die Leistungs- und Steuerungsfunktionen in einem einzigen Chip vereinen.
BLDC-Motoren (bürstenloser Gleichstrom) finden breite Anwendung
BLDC-Motoren (Bürstenloser Gleichstrom) finden aufgrund ihrer vorteilhaften Konstruktionseigenschaften breite Anwendung in verschiedenen Branchen und Systemen. Die Vorteile der elektronischen Kommutierung, wie verbessertes Strommanagement, erhöhtes Drehmoment, präzise Drehzahlregelung und allgemeine Verbesserung der Motorleistung, tragen zu ihrer weiten Verbreitung bei. Zu den bemerkenswerten Anwendungen von BLDC-Motoren gehören:
- Industrielle Anwendungen: BLDC-Motoren werden in Industriemaschinen und -geräten wie Pumpen, Kompressoren, Förderbändern und Werkzeugmaschinen eingesetzt, um einen effizienten und zuverlässigen Betrieb zu gewährleisten.
- Elektrofahrzeuge (EVs) und E-Mobilität: BLDC-Motoren sind aufgrund ihrer hohen Effizienz, Leistungsdichte und verbesserten Reichweite ein integraler Bestandteil von Elektrofahrzeugen, einschließlich Autos, Motorrädern, Rollern und Fahrrädern.
- Unbemannte Luftfahrzeuge (UAVs) und Drohnen: BLDC-Motoren werden aufgrund ihres leichten Designs, ihrer hohen Effizienz und präzisen Steuerung häufig in UAVs und Drohnen eingesetzt und ermöglichen einen stabilen Flug und Manövrierfähigkeit.
- Festplatten: BLDC-Motoren werden in Festplattenlaufwerken verwendet, um eine präzise und zuverlässige Steuerung des Spindelmotors zu erreichen und so genaue Lese-/Schreibvorgänge für Daten sicherzustellen.
- Unterhaltungselektronik: BLDC-Motoren sind in verschiedenen Unterhaltungselektronikgeräten wie Ventilatoren, Klimaanlagen, Kühlschränken und Waschmaschinen zu finden und bieten Energieeffizienz, leisen Betrieb und eine längere Lebensdauer.
- Robotik und industrielle Automatisierung: BLDC-Motoren werden aufgrund ihrer präzisen Bewegungssteuerung, ihres hohen Drehmoments und ihrer Haltbarkeit häufig in Robotersystemen und Automatisierungsgeräten eingesetzt. Sie ermöglichen sicherere und effizientere Prozesse und steigern die Produktivität in der Industrie.
Insbesondere industrielle Roboterarme revolutionieren Fertigungsprozesse, indem sie die Arbeitssicherheit verbessern, die Produktion beschleunigen und die Produktivität steigern. Diese vielseitigen und programmierbaren Roboterarme werden in Fabriken, Lagerhäusern und sogar in der Landwirtschaft eingesetzt. BLDC-Motoren spielen eine wichtige Rolle in Roboterarmen, da sie neben Zuverlässigkeit, Haltbarkeit und Immunität gegenüber elektromagnetischer Strahlung auch eine genaue Geschwindigkeits- und Drehmomentregelung bieten.
Zusammenfassend lässt sich sagen, dass BLDC-Motoren aufgrund ihrer Fähigkeit, eine präzise Drehzahlregelung, ein hohes Drehmoment, eine lange Lebensdauer und Immunität gegenüber elektromagnetischen Störungen zu bieten, für verschiedene Anwendungen geeignet sind, die von Industriemaschinen bis hin zu Elektrofahrzeugen und Robotik reichen.
Entwerfen
Der Entwurf eines BLDC-Controllers erfordert Fachwissen sowohl in Hardware- als auch in Softwareaspekten. Während im Handel erhältliche integrierte Lösungen die Anforderungen der meisten Anwendungen erfüllen können, gibt es Fälle, in denen eine kundenspezifische Lösung erforderlich sein kann.
LED Treiber: Um die elektronische Kommutierung zu erleichtern, werden typischerweise Leistungstransistoren eingesetzt, die hohen Spannungen und Strömen standhalten können. Beispiele für solche Transistoren sind Silizium (Si)-MOSFETs, IGBTs, Siliziumkarbid (SiC) MOSFETsund Galliumnitrid (GaN) HEMTs.
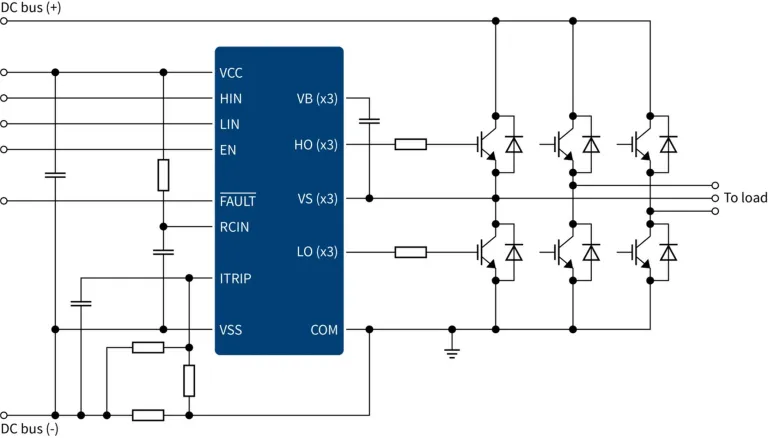
Der herkömmliche Ansatz für einen BLDC-Controller beinhaltet eine Halbbrückentopologie. Diese Topologie verwendet zwei Switches, einen davon Transistor auf der High-Side und eine auf der Low-Side, im Gegensatz zu einer vollständigen H-Brückenlösung. Seit Drei Phasen BLDC-Motoren werden aufgrund ihrer überlegenen Leistung und Effizienz im Vergleich zu ein- oder zweiphasigen Varianten häufig in Robotik- und industriellen Automatisierungsanwendungen eingesetzt. Ein typisches Steuerungsschema besteht aus drei Halbbrücken. Abbildung 3 zeigt das Diagramm von a Drei Phasen Treiber, der einen hochintegrierten Gate-Treiber verwendet.

Die Kontrolle eines Drei Phasen Ein BLDC-Motor umfasst sechs Schritte, die einen vollständigen Kommutierungszyklus bilden, um alle drei Statorwicklungen mit Strom zu versorgen. Dies wird erreicht, indem die High-Side- und Low-Side-Transistoren nacheinander ein- und ausgeschaltet werden.
Die High-Side-Schalter werden üblicherweise mit der Pulsweitenmodulation gesteuert (PWM) Technik. PWM wandelt den DC-Eingang um Spannung in eine modulierte Antriebsspannung umzuwandeln, was ein effizienteres Management, insbesondere beim Motorstart, und eine präzise Steuerung von Drehzahl und Drehmoment ermöglicht.
Die Auswahl der PWM-Frequenz ist ein entscheidender Gesichtspunkt. Entwickler streben oft nach einem Gleichgewicht zwischen Schaltverlusten, die bei hohen Frequenzen ausgeprägter sind, und Welligkeitsströmen, die hauptsächlich bei niedrigen Frequenzen erzeugt werden. Durch den Einsatz von GaN-Geräten (Galliumnitrid) können Schaltverluste selbst bei hohen Frequenzen deutlich reduziert werden.
Durch sorgfältige Optimierung der PWM-Frequenz und Nutzung der GaN-Technologie können Entwickler eine verbesserte Effizienz und Leistung bei der Steuerung des dreiphasigen BLDC-Motors erreichen.