Vantagens dos motores Brushless DC (BLDC) em robótica e automação
Os motores Brushless DC (BLDC) oferecem inúmeras vantagens em relação aos motores com escovas, tornando-os a escolha preferida em aplicações de robótica e automação. Embora os motores BLDC exijam um sistema de controle para regulação precisa de velocidade e torque, seus benefícios superam a complexidade adicional. As principais vantagens dos motores BLDC incluem:
- Eficiência aprimorada: os motores BLDC oferecem maior eficiência energética, um fator crucial considerando o significativo consumo global de eletricidade atribuído aos motores elétricos.
- Controle preciso: os motores BLDC permitem controle preciso de velocidade e torque, permitindo desempenho otimizado sob condições de carga variáveis. Esse nível de controle é essencial em robótica e automação, onde movimentos e respostas precisas são necessários.
- Durabilidade aprimorada: ao contrário dos motores com escovas que sofrem degradação de desempenho devido ao desgaste das escovas e arcos, os motores BLDC mantêm seu desempenho ao longo do tempo. Essa longevidade contribui para a confiabilidade geral e a vida útil dos sistemas robóticos.
- Operação de baixo ruído: Os motores BLDC operam silenciosamente, minimizando a geração de ruído em aplicações robóticas. Essa característica é particularmente importante em ambientes que exigem níveis de ruído reduzidos para melhorar a experiência do usuário ou para atender aos padrões regulamentares.
- Interferência Eletromagnética Reduzida (EMI): Os motores BLDC produzem níveis mais baixos de interferência eletromagnética, garantindo interrupção mínima em outros componentes eletrônicos ou sistemas de comunicação em sistemas robóticos.
- Design compacto e leve: Os motores BLDC são projetados para serem compactos e leves, tornando-os adequados para aplicações com espaço limitado ou restrições de peso. Essa vantagem facilita a integração de motores BLDC em vários sistemas robóticos, desde dispositivos de pequena escala até grandes configurações de automação industrial.
Com sua eficiência superior, controle preciso, durabilidade, operação com baixo ruído, EMI reduzida e design compacto, os motores BLDC tornaram-se indispensáveis em uma ampla gama de aplicações. De discos rígidos de computador a veículos elétricos e de robótica de pequena escala a grande automação industrial, os motores BLDC continuam a impulsionar avanços em eficiência e desempenho na indústria de robótica e automação.


Uma desvantagem dos motores BLDC é o controle intrincado o circuito e o consequente aumento das despesas. Sinais elétricos precisamente cronometrados são necessários para a técnica de comutação eletrônica, necessitando de circuitos de acionamento que possam gerá-los.
No entanto, os projetistas modernos agora têm a vantagem de ampla disponibilidade comercial de dispositivos de energia projetados especificamente para drivers de motor BLDC. Esses dispositivos vêm de forma autônoma ou integrados a um microcontrolador (o controlador), tornando o processo de projeto mais simples e diminuindo o custo total da solução.
os controladores
Além de regular a velocidade e o torque, desempenha um papel crucial na inicialização, parada e reversão da rotação do motor. Ele pode adquirir informações de posição do rotor através de dois métodos: sensor-controle do tipo, onde o controlador recebe diretamente esses dados, ou controle sem sensor, onde o controlador deduz a posição usando algoritmos apropriados implementados no firmware ou nível de hardware. Os sinais elétricos aplicados aos MOSFETs de potência, em termos de amplitude e duração, são determinados com base na posição do rotor.
Os motores BLDC com sensores são comumente empregados em aplicações onde é necessário iniciar o motor sob carga, pois a posição exata do motor é imediatamente conhecida. Existem vários métodos para determinar a posição:
- Sensores magnéticos de efeito Hall: Esses sensores são altamente resilientes e podem operar de forma eficaz mesmo em condições adversas, como aplicações automotivas.
- Codificadores rotativos: Esses dispositivos convertem movimento mecânico em impulsos elétricos e fornecem dados cruciais como posição, velocidade e direção. Dependendo do tecnologia empregados, os codificadores podem ser ópticos, capacitivos ou magnéticos.
- Sensores de relutância variável: Esses sensores geram um sinal elétrico que corresponde ao deslocamento de um objeto magneticamente condutor ou permeável em relação a uma bobina.

O controlador sem sensor emprega uma técnica de estimar a força eletromotriz de retorno (EMF) gerada nos enrolamentos do estator pela armadura rotativa para detectar a posição atual do rotor. Ao medir o EMF traseiro, o controlador pode determinar a posição do rotor, com o EMF traseiro mais alto indicando um ímã mais próximo.
O projeto ou seleção do controlador é uma tarefa crítica que requer precisão meticulosa. As principais funções executadas por um controlador de motor são as seguintes:
- Regulação de velocidade e direção: O controlador regula a velocidade do motor e controla seu sentido de rotação.
- Regulagem de torque: Ao monitorar a carga aplicada, o controlador determina o valor de torque apropriado para atingir o desempenho ideal do motor.
- Gerenciamento das fases de partida e parada: O controlador inicia e para gradualmente o motor, seguindo perfis precisos de aceleração e desaceleração.
- Proteção contra sobretensão ou sobrecorrente: O controlador protege o motor detectando e respondendo a Voltagem ou níveis atuais.
- Otimização da eficiência do motor: O controlador gerencia vários parâmetros do motor para maximizar a eficiência geral.
No passado, os controladores eram construídos usando componentes discretos junto com um microcontrolador que executava o firmware com os algoritmos de controle. No entanto, a tendência atual favorece soluções altamente integradas que combinam funções de potência e controle em um único chip.
Os motores BLDC (Brushless DC) encontram ampla aplicação
Os motores BLDC (Brushless DC) encontram ampla aplicação em vários setores e sistemas devido às suas características de construção vantajosas. Os benefícios derivados da comutação eletrônica, como gerenciamento aprimorado de corrente, aumento de torque, controle preciso de velocidade e melhoria geral do desempenho do motor, contribuem para seu uso generalizado. Algumas das aplicações notáveis dos motores BLDC incluem:
- Aplicações industriais: Os motores BLDC são utilizados em máquinas e equipamentos industriais, como bombas, compressores, transportadores e máquinas-ferramenta, para proporcionar uma operação eficiente e confiável.
- Veículos elétricos (EVs) e mobilidade elétrica: os motores BLDC são parte integrante dos veículos elétricos, incluindo carros, motocicletas, scooters e bicicletas, devido à sua alta eficiência, densidade de potência e alcance aprimorado.
- Veículos aéreos não tripulados (UAVs) e drones: os motores BLDC são comumente empregados em UAVs e drones por seu design leve, alta eficiência e controle preciso, permitindo um voo estável e manobrabilidade.
- Discos rígidos: Os motores BLDC são usados em unidades de disco rígido para obter um controle preciso e confiável do motor do eixo, garantindo operações precisas de leitura/gravação de dados.
- Eletrônicos de consumo: Os motores BLDC são encontrados em vários dispositivos eletrônicos de consumo, como ventiladores, condicionadores de ar, geladeiras e máquinas de lavar, oferecendo eficiência energética, operação silenciosa e vida útil prolongada.
- Robótica e automação industrial: os motores BLDC são amplamente utilizados em sistemas robóticos e equipamentos de automação por seu controle de movimento preciso, alto torque e durabilidade. Eles permitem processos mais seguros e eficientes, aumentando a produtividade nas indústrias.
Os braços robóticos industriais, em particular, estão revolucionando os processos de fabricação, melhorando a segurança do trabalhador, acelerando a produção e aumentando a produtividade. Esses braços robóticos versáteis e programáveis são utilizados em fábricas, armazéns e até mesmo em ambientes agrícolas. Os motores BLDC desempenham um papel vital nos braços robóticos, fornecendo velocidade precisa e regulação de torque, além de confiabilidade, durabilidade e imunidade à radiação eletromagnética.
Em resumo, a capacidade dos motores BLDC de oferecer controle de velocidade preciso, alto torque, durabilidade e imunidade à interferência eletromagnética os torna adequados para várias aplicações, desde máquinas industriais até veículos elétricos e robótica.
Desenho
Projetar um controlador BLDC requer experiência em aspectos de hardware e software. Embora as soluções integradas disponíveis comercialmente possam atender aos requisitos da maioria das aplicações, há casos em que uma solução personalizada pode ser necessária.
Dirigir: Para facilitar a comutação eletrônica, normalmente são empregados transistores de potência capazes de suportar altas tensões e correntes. Exemplos de tais transistores incluem MOSFETs de silício (Si), IGBTs, carboneto de silício (SiC) MOSFETs, e nitreto de gálio (GaN) HEMTs.
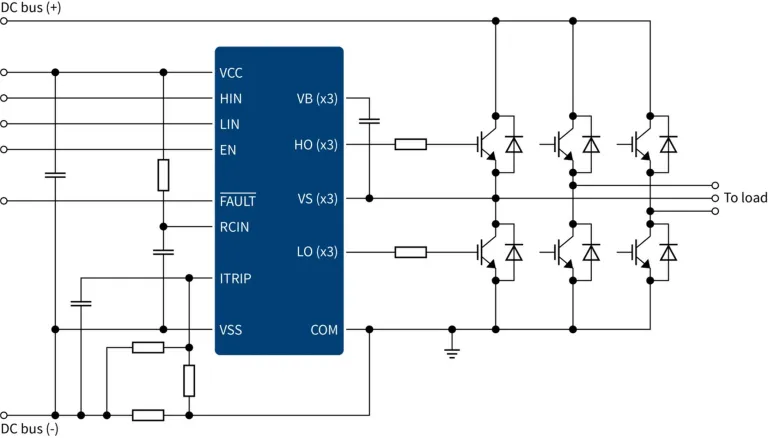
A abordagem convencional para um controlador BLDC envolve uma topologia de meia ponte. Esta topologia utiliza dois switches, com um Transistor no lado alto e outro no lado baixo, ao contrário de uma solução de ponte H completa. Desde Trifásico Os motores BLDC são comumente usados em aplicações de robótica e automação industrial devido ao seu desempenho e eficiência superiores em comparação com variantes monofásicas ou bifásicas, um esquema de controlador típico consiste em três meias pontes. A Figura 3 ilustra o diagrama de um Trifásico motorista que emprega um driver de portão altamente integrado.

O controle de um trifásico O motor BLDC envolve seis etapas, que compõem um ciclo de comutação completo, para energizar todos os três enrolamentos do estator. Isso é obtido ligando e desligando sequencialmente os transistores do lado alto e do lado baixo.
Os interruptores do lado alto são comumente controlados usando a modulação por largura de pulso (PWM) técnica. PWM converte a entrada DC Voltagem em uma tensão de acionamento modulada, permitindo um gerenciamento mais eficiente, principalmente durante a partida do motor, e permitindo o controle preciso de velocidade e torque.
A seleção da frequência PWM é uma consideração crítica. Os projetistas geralmente visam um equilíbrio entre as perdas de comutação, que são mais pronunciadas em altas frequências, e as correntes de ondulação, que são geradas principalmente em baixas frequências. O uso de dispositivos GaN (nitreto de gálio) pode reduzir significativamente as perdas de comutação, mesmo em altas frequências.
Ao otimizar cuidadosamente a frequência PWM e aproveitar a tecnologia GaN, os projetistas podem obter maior eficiência e desempenho no controle do motor BLDC trifásico.