Ventajas de los motores CC sin escobillas (BLDC) en robótica y automatización
Los motores de CC sin escobillas (BLDC) ofrecen numerosas ventajas sobre los motores con escobillas, lo que los convierte en la opción preferida en aplicaciones de robótica y automatización. Si bien los motores BLDC requieren un sistema de control para una regulación precisa de la velocidad y el par, sus beneficios superan la complejidad adicional. Las principales ventajas de los motores BLDC incluyen:
- Eficiencia mejorada: los motores BLDC ofrecen una mayor eficiencia energética, un factor crucial considerando el importante consumo global de electricidad atribuido a los motores eléctricos.
- Control preciso: los motores BLDC permiten un control preciso de la velocidad y el par, lo que permite un rendimiento optimizado en condiciones de carga variables. Este nivel de control es esencial en robótica y automatización, donde se requieren movimientos y respuestas precisos.
- Durabilidad mejorada: a diferencia de los motores con escobillas que experimentan una degradación del rendimiento debido al desgaste de las escobillas y la formación de arcos, los motores BLDC mantienen su rendimiento a lo largo del tiempo. Esta longevidad contribuye a la confiabilidad general y la vida útil de los sistemas robóticos.
- Operación con bajo nivel de ruido: los motores BLDC funcionan silenciosamente, lo que minimiza la generación de ruido en aplicaciones robóticas. Esta característica es particularmente importante en entornos que requieren niveles de ruido reducidos para mejorar la experiencia del usuario o para cumplir con los estándares normativos.
- Interferencia electromagnética reducida (EMI): los motores BLDC producen niveles más bajos de interferencia electromagnética, lo que garantiza una interrupción mínima de otros componentes electrónicos o sistemas de comunicación dentro de los sistemas robóticos.
- Diseño compacto y liviano: los motores BLDC están diseñados para ser compactos y livianos, lo que los hace adecuados para aplicaciones con restricciones de peso o espacio limitado. Esta ventaja facilita la integración de motores BLDC en varios sistemas robóticos, desde dispositivos a pequeña escala hasta grandes configuraciones de automatización industrial.
Con su eficiencia superior, control preciso, durabilidad, operación de bajo ruido, EMI reducido y diseño compacto, los motores BLDC se han vuelto indispensables en una amplia gama de aplicaciones. Desde discos duros de computadora hasta vehículos eléctricos y desde robótica a pequeña escala hasta gran automatización industrial, los motores BLDC continúan impulsando avances en eficiencia y rendimiento en la industria de la robótica y la automatización.


Una desventaja de los motores BLDC es el intrincado control circuito y el consiguiente aumento de los gastos. Las señales eléctricas sincronizadas con precisión son necesarias para la técnica de conmutación electrónica, lo que requiere circuitos impulsores que puedan generarlas.
Sin embargo, los diseñadores modernos ahora tienen la ventaja de una amplia disponibilidad comercial de dispositivos de potencia diseñados específicamente para controladores de motor BLDC. Estos dispositivos vienen en forma independiente o integrados con un microcontrolador (el controlador), lo que simplifica el proceso de diseño y reduce el costo total de la solución.
los controladores
Además de regular la velocidad y el par, juega un papel crucial en el inicio, la detención y la inversión de la rotación del motor. Puede adquirir información de la posición del rotor a través de dos métodos: sensorcontrol de tipo, donde el controlador recibe directamente estos datos, o control sin sensor, donde el controlador deduce la posición usando algoritmos apropiados implementados a nivel de firmware o hardware. Las señales eléctricas aplicadas a los MOSFET de potencia, en términos de amplitud y duración, se determinan en función de la posición del rotor.
Los motores BLDC con sensor se emplean comúnmente en aplicaciones donde se requiere arrancar el motor bajo carga, ya que la posición exacta del motor se conoce de inmediato. Hay varios métodos para determinar la posición:
- Sensores magnéticos de efecto Hall: estos sensores son muy resistentes y pueden funcionar de manera efectiva incluso en condiciones adversas, como las aplicaciones automotrices.
- Codificadores rotativos: estos dispositivos convierten el movimiento mecánico en impulsos eléctricos y proporcionan datos cruciales como la posición, la velocidad y la dirección. Dependiendo de la tecnología Empleados, los codificadores pueden ser ópticos, capacitivos o magnéticos.
- Sensores de reluctancia variable: Estos sensores generan una señal eléctrica que corresponde al desplazamiento de un objeto magnéticamente conductor o permeable en relación a una bobina.

El controlador sin sensor emplea una técnica de estimación de la fuerza contraelectromotriz (EMF) generada en los devanados del estator por la armadura giratoria para detectar la posición actual del rotor. Al medir la EMF trasera, el controlador puede determinar la posición del rotor, con una EMF trasera más alta que indica un imán más cercano.
El diseño o la selección del controlador es una tarea crítica que requiere una precisión meticulosa. Las funciones principales realizadas por un controlador de motor son las siguientes:
- Regulación de velocidad y sentido: El controlador regula la velocidad del motor y controla su sentido de giro.
- Regulación de par: al monitorear la carga aplicada, el controlador determina el valor de par apropiado para lograr un rendimiento óptimo del motor.
- Gestión de las fases de arranque y parada: El controlador inicia y detiene gradualmente el motor, siguiendo perfiles precisos de aceleración y desaceleración.
- Protección contra sobrevoltaje o sobrecorriente: El controlador protege el motor detectando y respondiendo a un exceso voltaje o niveles actuales.
- Optimización de la eficiencia del motor: el controlador gestiona varios parámetros del motor para maximizar la eficiencia general.
En el pasado, los controladores se construían usando componentes discretos junto con un microcontrolador que ejecutaba el firmware con los algoritmos de control. Sin embargo, la tendencia actual favorece las soluciones altamente integradas que combinan funciones de control y potencia en un solo chip.
Los motores BLDC (DC sin escobillas) encuentran una amplia aplicación
Los motores BLDC (DC sin escobillas) encuentran una amplia aplicación en diversas industrias y sistemas debido a sus ventajosas características de construcción. Los beneficios derivados de la conmutación electrónica, como la gestión mejorada de la corriente, el aumento del par, el control preciso de la velocidad y la mejora general del rendimiento del motor, contribuyen a su uso generalizado. Algunas de las aplicaciones notables de los motores BLDC incluyen:
- Aplicaciones industriales: los motores BLDC se utilizan en maquinaria y equipos industriales, como bombas, compresores, transportadores y máquinas herramienta, para brindar un funcionamiento eficiente y confiable.
- Vehículos eléctricos (EV) y movilidad eléctrica: los motores BLDC son una parte integral de los vehículos eléctricos, incluidos automóviles, motocicletas, scooters y bicicletas, debido a su alta eficiencia, densidad de potencia y rango mejorado.
- Vehículos aéreos no tripulados (UAV) y drones: los motores BLDC se emplean comúnmente en UAV y drones por su diseño liviano, alta eficiencia y control preciso, lo que permite un vuelo y una maniobrabilidad estables.
- Discos duros: los motores BLDC se utilizan en unidades de disco duro para lograr un control preciso y confiable del motor del eje, lo que garantiza operaciones precisas de lectura/escritura de datos.
- Electrónica de consumo: los motores BLDC se encuentran en varios dispositivos electrónicos de consumo, como ventiladores, acondicionadores de aire, refrigeradores y lavadoras, y ofrecen eficiencia energética, funcionamiento silencioso y vida útil prolongada.
- Robótica y automatización industrial: los motores BLDC se utilizan ampliamente en sistemas robóticos y equipos de automatización por su control de movimiento preciso, alto par y durabilidad. Permiten procesos más seguros y eficientes, mejorando la productividad en las industrias.
Los brazos robóticos industriales, en particular, están revolucionando los procesos de fabricación al mejorar la seguridad de los trabajadores, acelerar la producción y aumentar la productividad. Estos brazos robóticos versátiles y programables se utilizan en fábricas, almacenes e incluso entornos agrícolas. Los motores BLDC desempeñan un papel vital en los brazos robóticos al proporcionar una regulación precisa de la velocidad y el par, además de confiabilidad, durabilidad e inmunidad a la radiación electromagnética.
En resumen, la capacidad de los motores BLDC para ofrecer un control de velocidad preciso, un alto par, durabilidad e inmunidad a las interferencias electromagnéticas los hace ideales para diversas aplicaciones, desde maquinaria industrial hasta vehículos eléctricos y robótica.
Diseño
El diseño de un controlador BLDC requiere experiencia tanto en aspectos de hardware como de software. Si bien las soluciones integradas disponibles comercialmente pueden cumplir con los requisitos de la mayoría de las aplicaciones, hay casos en los que puede ser necesaria una solución personalizada.
Destornillador: Para facilitar la conmutación electrónica, normalmente se emplean transistores de potencia capaces de soportar altos voltajes y corrientes. Ejemplos de tales transistores incluyen MOSFET de silicio (Si), IGBTs, carburo de silicio (SiC) MOSFETy HEMT de nitruro de galio (GaN).
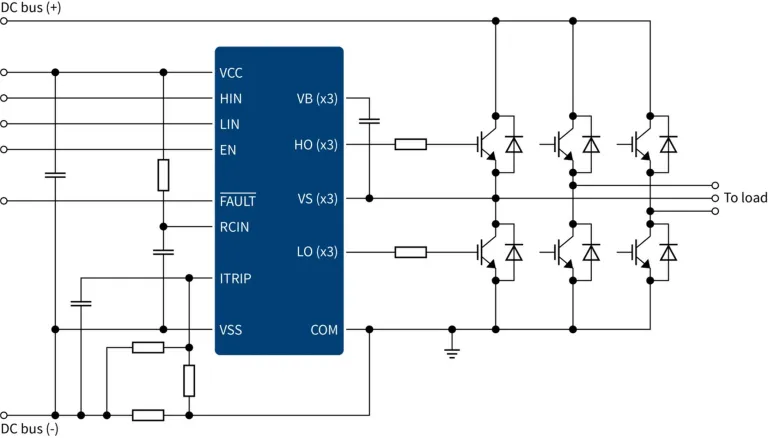
El enfoque convencional para un controlador BLDC implica una topología de medio puente. Esta topología utiliza dos conmutadores, con uno Transistor en el lado alto y uno en el lado bajo, a diferencia de una solución de puente H completa. Desde Tres fases Los motores BLDC se usan comúnmente en aplicaciones de robótica y automatización industrial debido a su rendimiento y eficiencia superiores en comparación con las variantes monofásicas o bifásicas, un esquema de controlador típico consta de tres medios puentes. La Figura 3 ilustra el diagrama de un Tres fases controlador que emplea un controlador de puerta altamente integrado.

el mando de un tres fases El motor BLDC implica seis pasos, que constituyen un ciclo de conmutación completo, para energizar los tres devanados del estator. Esto se logra encendiendo y apagando secuencialmente los transistores del lado alto y del lado bajo.
Los interruptores del lado alto se controlan comúnmente mediante la modulación de ancho de pulso (PWM) técnica. PWM convierte la entrada de CC voltaje en un voltaje de accionamiento modulado, lo que permite una gestión más eficiente, especialmente durante el arranque del motor, y permite un control preciso de la velocidad y el par.
La selección de la frecuencia PWM es una consideración crítica. Los diseñadores a menudo buscan un equilibrio entre las pérdidas de conmutación, que son más pronunciadas a altas frecuencias, y las corrientes de ondulación, que se generan principalmente a bajas frecuencias. El uso de dispositivos de GaN (nitruro de galio) puede reducir significativamente las pérdidas por conmutación, incluso a altas frecuencias.
Al optimizar cuidadosamente la frecuencia PWM y aprovechar la tecnología GaN, los diseñadores pueden lograr una mayor eficiencia y rendimiento en el control del motor trifásico BLDC.