Avantages des moteurs CC sans balais (BLDC) dans la robotique et l'automatisation
Les moteurs CC sans balais (BLDC) offrent de nombreux avantages par rapport aux moteurs à balais, ce qui en fait un choix privilégié dans les applications de robotique et d'automatisation. Alors que les moteurs BLDC nécessitent un système de contrôle pour une régulation précise de la vitesse et du couple, leurs avantages l'emportent sur la complexité supplémentaire. Les principaux avantages des moteurs BLDC incluent :
- Efficacité améliorée : les moteurs BLDC offrent une efficacité énergétique supérieure, un facteur crucial compte tenu de l'importante consommation mondiale d'électricité attribuée aux moteurs électriques.
- Contrôle précis : les moteurs BLDC permettent un contrôle précis de la vitesse et du couple, permettant des performances optimisées dans des conditions de charge variables. Ce niveau de contrôle est essentiel dans la robotique et l'automatisation, où des mouvements et des réponses précis sont nécessaires.
- Durabilité améliorée : contrairement aux moteurs à balais qui subissent une dégradation des performances en raison de l'usure des balais et des arcs électriques, les moteurs BLDC conservent leurs performances dans le temps. Cette longévité contribue à la fiabilité globale et à la durée de vie des systèmes robotiques.
- Fonctionnement à faible bruit : les moteurs BLDC fonctionnent silencieusement, minimisant la génération de bruit dans les applications robotiques. Cette caractéristique est particulièrement importante dans les environnements qui nécessitent des niveaux de bruit réduits pour une meilleure expérience utilisateur ou pour répondre aux normes réglementaires.
- Interférences électromagnétiques réduites (EMI) : les moteurs BLDC produisent des niveaux inférieurs d'interférences électromagnétiques, assurant une perturbation minimale des autres composants électroniques ou des systèmes de communication au sein des systèmes robotiques.
- Conception compacte et légère : Les moteurs BLDC sont conçus pour être compacts et légers, ce qui les rend adaptés aux applications avec des restrictions d'espace ou de poids limitées. Cet avantage facilite l'intégration des moteurs BLDC dans divers systèmes robotiques, des appareils à petite échelle aux grandes configurations d'automatisation industrielle.
Avec leur efficacité supérieure, leur contrôle précis, leur durabilité, leur fonctionnement silencieux, leurs EMI réduites et leur conception compacte, les moteurs BLDC sont devenus indispensables dans une large gamme d'applications. Des disques durs d'ordinateur aux véhicules électriques et de la robotique à petite échelle à l'automatisation industrielle à grande échelle, les moteurs BLDC continuent de faire progresser l'efficacité et les performances dans l'industrie de la robotique et de l'automatisation.


Un inconvénient des moteurs BLDC est le contrôle complexe circuit et l'augmentation subséquente des dépenses. Des signaux électriques synchronisés avec précision sont nécessaires pour la technique de commutation électronique, nécessitant des circuits de commande capables de les générer.
Néanmoins, les concepteurs modernes ont désormais l'avantage d'une large disponibilité commerciale de dispositifs d'alimentation spécialement conçus pour les pilotes de moteur BLDC. Ces appareils se présentent sous forme autonome ou intégrés à un microcontrôleur (le contrôleur), ce qui simplifie le processus de conception et diminue le coût global de la solution.
Les contrôleurs
Outre la régulation de la vitesse et du couple, joue un rôle crucial dans le démarrage, l'arrêt et l'inversion de la rotation du moteur. Il peut acquérir des informations sur la position du rotor par deux méthodes : capteur- type contrôle, où le contrôleur reçoit directement ces données, ou contrôle sans capteur, où le contrôleur déduit la position à l'aide d'algorithmes appropriés implémentés au niveau du micrologiciel ou du matériel. Les signaux électriques appliqués aux MOSFET de puissance, en termes d'amplitude et de durée, sont déterminés en fonction de la position du rotor.
Les moteurs BLDC à capteur sont couramment utilisés dans les applications où le démarrage du moteur sous charge est nécessaire puisque la position exacte du moteur est immédiatement connue. Il existe plusieurs méthodes pour déterminer la position:
- Capteurs magnétiques à effet Hall : ces capteurs sont très résistants et peuvent fonctionner efficacement même dans des conditions difficiles, telles que les applications automobiles.
- Codeurs rotatifs : ces appareils convertissent le mouvement mécanique en impulsions électriques et fournissent des données cruciales telles que la position, la vitesse et la direction. En fonction de la sans souci utilisés, les codeurs peuvent être optiques, capacitifs ou magnétiques.
- Capteurs à réluctance variable : Ces capteurs génèrent un signal électrique qui correspond au déplacement d'un objet magnétiquement conducteur ou perméable par rapport à une bobine.

Le contrôleur sans capteur utilise une technique d'estimation de la force contre-électromotrice (EMF) générée dans les enroulements du stator par l'armature rotative pour détecter la position actuelle du rotor. En mesurant la force contre-électromotrice, le contrôleur peut déterminer la position du rotor, une force contre-électromotrice plus élevée indiquant un aimant plus proche.
La conception ou la sélection du contrôleur est une tâche critique qui nécessite une précision méticuleuse. Les principales fonctions exécutées par un contrôleur de moteur sont les suivantes :
- Régulation de la vitesse et du sens : Le contrôleur régule la vitesse du moteur et contrôle son sens de rotation.
- Régulation du couple : en surveillant la charge appliquée, le contrôleur détermine la valeur de couple appropriée pour obtenir des performances optimales du moteur.
- Gestion des phases de démarrage et d'arrêt : Le contrôleur démarre et arrête progressivement le moteur en suivant des profils d'accélération et de décélération précis.
- Protection contre les surtensions ou les surintensités : le contrôleur protège le moteur en détectant et en réagissant aux Tension ou les niveaux actuels.
- Optimisation de l'efficacité du moteur : Le contrôleur gère divers paramètres du moteur pour maximiser l'efficacité globale.
Dans le passé, les contrôleurs étaient construits à l'aide de composants discrets avec un microcontrôleur qui exécutait le micrologiciel avec les algorithmes de contrôle. Cependant, la tendance actuelle favorise les solutions hautement intégrées qui combinent les fonctions d'alimentation et de contrôle dans une seule puce.
Les moteurs BLDC (Brushless DC) trouvent une application étendue
Les moteurs BLDC (Brushless DC) trouvent une application étendue dans diverses industries et systèmes en raison de leurs caractéristiques de construction avantageuses. Les avantages dérivés de la commutation électronique, tels qu'une meilleure gestion du courant, un couple accru, un contrôle précis de la vitesse et une amélioration globale des performances du moteur, contribuent à leur utilisation généralisée. Certaines des applications notables des moteurs BLDC incluent :
- Applications industrielles : les moteurs BLDC sont utilisés dans les machines et équipements industriels, tels que les pompes, les compresseurs, les convoyeurs et les machines-outils, pour assurer un fonctionnement efficace et fiable.
- Véhicules électriques (VE) et mobilité électrique : les moteurs BLDC font partie intégrante des véhicules électriques, y compris les voitures, les motos, les scooters et les vélos, en raison de leur rendement élevé, de leur densité de puissance et de leur autonomie améliorée.
- Véhicules aériens sans pilote (UAV) et drones : les moteurs BLDC sont couramment utilisés dans les UAV et les drones pour leur conception légère, leur haute efficacité et leur contrôle précis, permettant un vol et une maniabilité stables.
- Disques durs : les moteurs BLDC sont utilisés dans les disques durs pour obtenir un contrôle précis et fiable du moteur de broche, garantissant des opérations de lecture/écriture de données précises.
- Électronique grand public : les moteurs BLDC se trouvent dans divers appareils électroniques grand public tels que les ventilateurs, les climatiseurs, les réfrigérateurs et les machines à laver, offrant une efficacité énergétique, un fonctionnement silencieux et une durée de vie prolongée.
- Robotique et automatisation industrielle : les moteurs BLDC sont largement utilisés dans les systèmes robotiques et les équipements d'automatisation pour leur contrôle de mouvement précis, leur couple élevé et leur durabilité. Ils permettent des processus plus sûrs et plus efficaces, améliorant la productivité dans les industries.
Les bras robotiques industriels, en particulier, révolutionnent les processus de fabrication en améliorant la sécurité des travailleurs, en accélérant la production et en augmentant la productivité. Ces bras robotiques polyvalents et programmables sont utilisés dans les usines, les entrepôts et même en milieu agricole. Les moteurs BLDC jouent un rôle vital dans les bras robotiques en fournissant une régulation précise de la vitesse et du couple, ainsi que la fiabilité, la durabilité et l'immunité aux rayonnements électromagnétiques.
En résumé, la capacité des moteurs BLDC à offrir un contrôle précis de la vitesse, un couple élevé, une durabilité et une immunité aux interférences électromagnétiques les rend bien adaptés à diverses applications, allant des machines industrielles aux véhicules électriques et à la robotique.
Conception
La conception d'un contrôleur BLDC nécessite une expertise à la fois matérielle et logicielle. Alors que les solutions intégrées disponibles dans le commerce peuvent répondre aux exigences de la plupart des applications, il existe des cas où une solution personnalisée peut être nécessaire.
Tournevis: Pour faciliter la commutation électronique, des transistors de puissance capables de résister à des tensions et des courants élevés sont généralement utilisés. Des exemples de tels transistors comprennent les MOSFET au silicium (Si), IGBTs, carbure de silicium (SiC) MOSFETs, et HEMT de nitrure de gallium (GaN).
L'approche conventionnelle pour un contrôleur BLDC implique une topologie en demi-pont. Cette topologie utilise deux commutateurs, avec un Transistor sur le côté haut et un sur le côté bas, par opposition à une solution complète de pont en H. Depuis Trois phases Les moteurs BLDC sont couramment utilisés dans les applications de robotique et d'automatisation industrielle en raison de leurs performances et de leur efficacité supérieures par rapport aux variantes monophasées ou biphasées, un schéma de contrôleur typique se compose de trois demi-ponts. La figure 3 illustre le schéma d'un Trois phases pilote employant un pilote de porte hautement intégré.

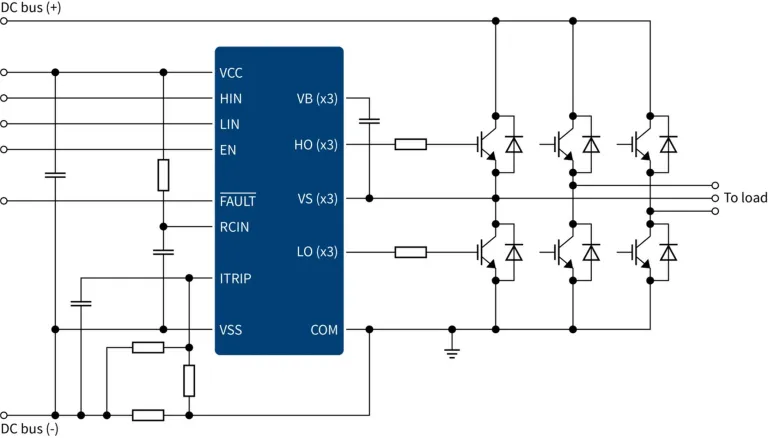
Le contrôle d'un trois phases Le moteur BLDC implique six étapes, qui constituent un cycle de commutation complet, pour alimenter les trois enroulements du stator. Ceci est réalisé en activant et désactivant séquentiellement les transistors côté haut et côté bas.
Les commutateurs côté haut sont généralement contrôlés à l'aide de la modulation de largeur d'impulsion (PWM) technique. PWM convertit l'entrée CC Tension en une tension d'entraînement modulée, permettant une gestion plus efficace, notamment lors du démarrage du moteur, et permettant un contrôle précis de la vitesse et du couple.
La sélection de la fréquence PWM est une considération critique. Les concepteurs visent souvent un équilibre entre les pertes de commutation, qui sont plus prononcées aux hautes fréquences, et les courants d'ondulation, qui sont principalement générés aux basses fréquences. L'utilisation de dispositifs GaN (nitrure de gallium) peut réduire considérablement les pertes de commutation, même à des fréquences élevées.
En optimisant soigneusement la fréquence PWM et en tirant parti de la technologie GaN, les concepteurs peuvent améliorer l'efficacité et les performances du contrôle du moteur BLDC triphasé.