ロボット工学およびオートメーションにおけるブラシレス DC (BLDC) モーターの利点
ブラシレス DC (BLDC) モーターにはブラシ付きモーターに比べて多くの利点があるため、ロボット工学やオートメーションのアプリケーションで好まれる選択肢となっています。 BLDC モーターには、速度とトルクを正確に調整するための制御システムが必要ですが、その利点は追加の複雑さを上回ります。 BLDC モーターの主な利点は次のとおりです。
- 効率の向上: BLDC モーターはより高いエネルギー効率を実現します。これは、電気モーターによる世界的な電力消費量が大きいことを考慮すると、重要な要素です。
- 正確な制御: BLDC モーターは正確な速度とトルク制御を可能にし、さまざまな負荷条件下で最適なパフォーマンスを実現します。 このレベルの制御は、正確な動きと応答が必要とされるロボット工学やオートメーションでは不可欠です。
- 耐久性の向上: ブラシの磨耗やアーク放電によって性能が低下するブラシ付きモーターとは異なり、BLDC モーターは時間が経っても性能を維持します。 この寿命の長さは、ロボット システムの全体的な信頼性と寿命に貢献します。
- 低騒音動作: BLDC モーターは静かに動作し、ロボット用途での騒音の発生を最小限に抑えます。 この特性は、ユーザー エクスペリエンスを向上させるため、または規制基準を満たすためにノイズ レベルの低減が必要な環境では特に重要です。
- 電磁干渉 (EMI) の低減: BLDC モーターは生成する電磁干渉のレベルが低く、他の電子コンポーネントやロボット システム内の通信システムへの混乱を最小限に抑えます。
- コンパクトで軽量な設計: BLDC モーターはコンパクトで軽量になるように設計されており、スペースや重量制限が限られている用途に適しています。 この利点により、小規模デバイスから大規模な産業オートメーション設定に至るまで、さまざまなロボット システムへの BLDC モーターの統合が容易になります。
BLDC モーターは、優れた効率、正確な制御、耐久性、低ノイズ動作、EMI の低減、コンパクトな設計により、幅広い用途に不可欠なものとなっています。 コンピューターのハードドライブから電気自動車、小規模ロボット工学から大規模な産業オートメーションに至るまで、BLDC モーターはロボット工学およびオートメーション業界全体で効率と性能の進歩を推進し続けています。


BLDC モーターの欠点の XNUMX つは、制御が複雑なことです。 回路 そしてその後の出費の増加。 電子スイッチング技術には正確なタイミングの電気信号が必要であり、それを生成できるドライバー回路が必要です。
それにもかかわらず、現代の設計者は、BLDC モーター ドライバー用に特別に設計されたパワー デバイスを広範囲に市販できるという利点を享受しています。 これらのデバイスはスタンドアロン形式で提供されるか、マイクロコントローラー (コントローラー) と統合されているため、設計プロセスが簡素化され、ソリューション全体のコストが削減されます。
コントローラー
速度とトルクの調整とは別に、モーターの回転の開始、停止、逆転において重要な役割を果たします。 ローターの位置情報は次の XNUMX つの方法で取得できます。 センサーコントローラーがこのデータを直接受信するタイプの制御、またはコントローラーがファームウェアまたはハードウェア レベルで実装された適切なアルゴリズムを使用して位置を推定するセンサーレス制御です。 パワー MOSFET に適用される電気信号は、振幅と持続時間に関して、ローターの位置に基づいて決定されます。
センサー付き BLDC モーターは、モーターの正確な位置がすぐに分かるため、負荷がかかった状態でモーターを始動する必要があるアプリケーションで一般的に使用されます。 位置を決定するにはいくつかの方法があります。
- ホール効果磁気センサー: これらのセンサーは復元力が高く、自動車用途などの過酷な条件でも効果的に動作します。
- ロータリー エンコーダ: これらのデバイスは、機械的な動きを電気インパルスに変換し、位置、速度、方向などの重要なデータを提供します。 状況に応じて、 テクノロジー エンコーダを使用する場合、光学式、容量性、または磁気式のエンコーダを使用できます。
- 可変磁気抵抗センサー: これらのセンサーは、コイルに対する磁気伝導性または透磁性の物体の変位に対応する電気信号を生成します。

センサレス コントローラは、回転する電機子によって固定子巻線に発生する逆起電力 (EMF) を推定する手法を採用し、回転子の現在位置を検出します。 逆起電力を測定することで、コントローラーはローターの位置を決定できます。逆起電力が高いほど磁石が近いことを示します。
コントローラーの設計または選択は、細心の精度が要求される重要な作業です。 モーター コントローラーによって実行される主な機能は次のとおりです。
- 速度と方向の調整: コントローラーはモーターの速度を調整し、回転方向を制御します。
- トルク調整: 適用された負荷を監視することにより、コントローラーは最適なモーター性能を達成するために適切なトルク値を決定します。
- 開始フェーズと停止フェーズの管理: コントローラーは、正確な加速プロファイルと減速プロファイルに従って、モーターを徐々に開始および停止します。
- 過電圧または過電流に対する保護: コントローラーは、過剰な電圧を検出して応答することでモーターを保護します。 電圧 または現在のレベル。
- モーター効率の最適化: コントローラーはさまざまなエンジンパラメータを管理して、全体の効率を最大化します。
これまで、コントローラーは、制御アルゴリズムを備えたファームウェアを実行するマイクロコントローラーとともに、ディスクリート コンポーネントを使用して構築されていました。 しかし、現在の傾向では、電源機能と制御機能を XNUMX つのチップに統合した高度に統合されたソリューションが好まれています。
BLDC (ブラシレス DC) モーターは幅広い用途に使用されています
BLDC (ブラシレス DC) モーターは、その有利な構造特性により、さまざまな産業やシステムで広範な用途に使用されています。 電流管理の強化、トルクの増加、正確な速度制御、全体的なモーター性能の向上など、電子整流から得られるメリットは、その普及に貢献しています。 BLDC モーターの注目すべき用途には次のようなものがあります。
- 産業用途: BLDC モーターは、ポンプ、コンプレッサー、コンベア、工作機械などの産業用機械や装置に利用され、効率的で信頼性の高い動作を実現します。
- 電気自動車 (EV) と e-モビリティ: BLDC モーターは、その高効率、電力密度、航続距離の向上により、自動車、オートバイ、スクーター、自転車などの電気自動車に不可欠な部品です。
- 無人航空機 (UAV) とドローン: BLDC モーターは、軽量設計、高効率、正確な制御により、安定した飛行と操作性を可能にするため、UAV とドローンで一般的に採用されています。
- ハードドライブ: ハードディスクドライブには BLDC モーターが使用されており、正確で信頼性の高いスピンドルモーター制御を実現し、正確なデータの読み取り/書き込み動作を保証します。
- 家庭用電化製品: BLDC モーターは、扇風機、エアコン、冷蔵庫、洗濯機などのさまざまな家庭用電子機器に使用されており、エネルギー効率、静かな動作、および長寿命を実現します。
- ロボット工学および産業オートメーション: BLDC モーターは、その正確な動作制御、高トルク、耐久性により、ロボット システムやオートメーション機器で広く利用されています。 これらにより、より安全で効率的なプロセスが可能になり、産業の生産性が向上します。
特に産業用ロボット アームは、作業者の安全性を向上させ、生産を加速し、生産性を向上させることにより、製造プロセスに革命をもたらしています。 これらの多用途でプログラム可能なロボット アームは、工場、倉庫、さらには農業現場でも利用されています。 BLDC モーターは、信頼性、耐久性、電磁放射に対する耐性とともに、正確な速度とトルクの調整を提供することで、ロボット アームにおいて重要な役割を果たします。
要約すると、BLDC モーターは正確な速度制御、高トルク、耐久性、電磁干渉に対する耐性を備えているため、産業用機械から電気自動車やロボット工学に至るまで、さまざまな用途に最適です。
設計
BLDC コントローラーの設計には、ハードウェアとソフトウェアの両方の側面に関する専門知識が必要です。 市販の統合ソリューションはほとんどのアプリケーションの要件を満たすことができますが、カスタマイズされたソリューションが必要な場合もあります。
ドライバ: 電子整流を容易にするために、通常、高電圧および高電流に耐えることができるパワー トランジスタが使用されます。 このようなトランジスタの例には、シリコン (Si) MOSFET、 IGBTs、炭化ケイ素(SiC) MOSFET、窒化ガリウム(GaN)HEMT。
BLDC コントローラーの従来のアプローチには、ハーフブリッジ トポロジが含まれます。 このトポロジは XNUMX つのスイッチを利用します。 トランジスタ 完全な H ブリッジ ソリューションとは対照的に、ハイサイドとローサイドに XNUMX つずつ配置されます。 以来 3相 BLDC モーターは、単相または二相タイプと比較して優れた性能と効率を備えているため、ロボット工学や産業オートメーションのアプリケーションで一般的に使用されており、一般的なコントローラー方式は 3 つのハーフブリッジで構成されています。 図 XNUMX は、 3相 高度に統合されたゲートドライバーを採用したドライバー。

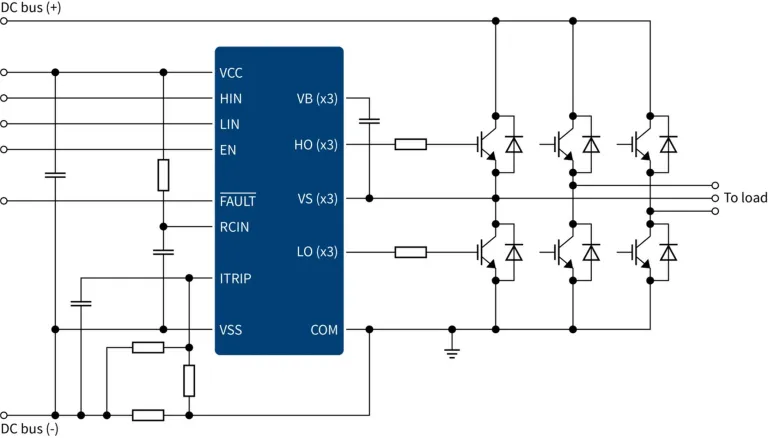
の制御 3相 BLDC モーターには、XNUMX つの固定子巻線すべてに通電するための XNUMX つのステップが含まれ、完全な整流サイクルを構成します。 これは、ハイサイドとローサイドのトランジスタを順番にオン/オフに切り替えることによって実現されます。
ハイサイド スイッチは通常、パルス幅変調 (PWM)テクニック。 PWM は DC 入力を変換します 電圧 変調された駆動電圧に変換することで、特にモーターの起動時に、より効率的な管理が可能になり、速度とトルクの正確な制御が可能になります。
PWM 周波数の選択は重要な考慮事項です。 設計者は多くの場合、高周波でより顕著となるスイッチング損失と、主に低周波で発生するリップル電流との間のバランスを目指します。 GaN (窒化ガリウム) デバイスを使用すると、高周波数であってもスイッチング損失を大幅に低減できます。
PWM 周波数を慎重に最適化し、GaN テクノロジーを活用することで、設計者は三相 BLDC モーターの制御効率と性能を向上させることができます。