Vantaggi dei motori CC senza spazzole (BLDC) nella robotica e nell'automazione
I motori CC senza spazzole (BLDC) offrono numerosi vantaggi rispetto ai motori con spazzole, rendendoli la scelta preferita nelle applicazioni di robotica e automazione. Sebbene i motori BLDC richiedano un sistema di controllo per una regolazione precisa della velocità e della coppia, i loro vantaggi superano la complessità aggiuntiva. I principali vantaggi dei motori BLDC includono:
- Maggiore efficienza: i motori BLDC offrono una maggiore efficienza energetica, un fattore cruciale considerando il notevole consumo globale di elettricità attribuito ai motori elettrici.
- Controllo accurato: i motori BLDC consentono un controllo preciso della velocità e della coppia, consentendo prestazioni ottimizzate in condizioni di carico variabili. Questo livello di controllo è essenziale nella robotica e nell'automazione, dove sono richiesti movimenti e risposte precise.
- Maggiore durata: a differenza dei motori a spazzole che subiscono un degrado delle prestazioni a causa dell'usura delle spazzole e dell'arco, i motori BLDC mantengono le loro prestazioni nel tempo. Questa longevità contribuisce all'affidabilità complessiva e alla durata dei sistemi robotici.
- Funzionamento silenzioso: i motori BLDC funzionano silenziosamente, riducendo al minimo la generazione di rumore nelle applicazioni robotiche. Questa caratteristica è particolarmente importante in ambienti che richiedono livelli di rumorosità ridotti per una migliore esperienza utente o per soddisfare gli standard normativi.
- Interferenza elettromagnetica ridotta (EMI): i motori BLDC producono livelli inferiori di interferenza elettromagnetica, garantendo interruzioni minime ad altri componenti elettronici o sistemi di comunicazione all'interno dei sistemi robotici.
- Design compatto e leggero: i motori BLDC sono progettati per essere compatti e leggeri, rendendoli adatti per applicazioni con spazio limitato o limiti di peso. Questo vantaggio facilita l'integrazione dei motori BLDC in vari sistemi robotici, dai dispositivi su piccola scala alle grandi configurazioni di automazione industriale.
Con la loro efficienza superiore, controllo preciso, durata, funzionamento a bassa rumorosità, EMI ridotta e design compatto, i motori BLDC sono diventati indispensabili in un'ampia gamma di applicazioni. Dai dischi rigidi dei computer ai veicoli elettrici e dalla robotica su piccola scala alla grande automazione industriale, i motori BLDC continuano a guidare i progressi in termini di efficienza e prestazioni nel settore della robotica e dell'automazione.


Uno svantaggio dei motori BLDC è il controllo complesso circuito e il conseguente aumento delle spese. Per la tecnica di commutazione elettronica sono necessari segnali elettrici temporizzati con precisione, che richiedono circuiti di pilotaggio in grado di generarli.
Tuttavia, i progettisti moderni hanno ora il vantaggio di un'ampia disponibilità commerciale di dispositivi di potenza progettati specificamente per i driver dei motori BLDC. Questi dispositivi sono disponibili in forma autonoma o integrati con un microcontrollore (il controller), semplificando il processo di progettazione e riducendo il costo complessivo della soluzione.
I controllori
Oltre a regolare la velocità e la coppia, svolge un ruolo cruciale nell'avviare, arrestare e invertire la rotazione del motore. Può acquisire informazioni sulla posizione del rotore attraverso due metodi: sensore-tipo di controllo, in cui il controllore riceve direttamente questi dati, o controllo sensorless, in cui il controllore deduce la posizione utilizzando opportuni algoritmi implementati a livello di firmware o hardware. I segnali elettrici applicati ai MOSFET di potenza, in termini di ampiezza e durata, sono determinati in base alla posizione del rotore.
I motori BLDC sensorizzati sono comunemente impiegati in applicazioni in cui è richiesto l'avviamento del motore sotto carico poiché la posizione esatta del motore è immediatamente nota. Esistono diversi metodi per determinare la posizione:
- Sensori magnetici ad effetto Hall: questi sensori sono altamente resilienti e possono funzionare efficacemente anche in condizioni difficili, come le applicazioni automobilistiche.
- Encoder rotativi: questi dispositivi convertono il movimento meccanico in impulsi elettrici e forniscono dati cruciali come posizione, velocità e direzione. Dipende da la tecnologia impiegati, gli encoder possono essere ottici, capacitivi o magnetici.
- Sensori a riluttanza variabile: questi sensori generano un segnale elettrico che corrisponde allo spostamento di un oggetto magneticamente conduttivo o permeabile rispetto a una bobina.

Il controller sensorless impiega una tecnica di stima della forza controelettromotrice (EMF) generata negli avvolgimenti dello statore dall'armatura rotante per rilevare la posizione attuale del rotore. Misurando la forza controelettromotrice, il controller può determinare la posizione del rotore, con una controforza maggiore che indica un magnete più vicino.
La progettazione o la selezione del controller è un'attività critica che richiede una precisione meticolosa. Le funzioni principali svolte da un controllore motore sono le seguenti:
- Regolazione della velocità e della direzione: il controller regola la velocità del motore e ne controlla il senso di rotazione.
- Regolazione della coppia: monitorando il carico applicato, il controller determina il valore di coppia appropriato per ottenere prestazioni ottimali del motore.
- Gestione delle fasi di avviamento e arresto: Il controllore avvia e arresta gradualmente il motore, seguendo precisi profili di accelerazione e decelerazione.
- Protezione da sovratensione o sovracorrente: il controller salvaguarda il motore rilevando e reagendo a un eccesso voltaggio o livelli attuali.
- Ottimizzazione dell'efficienza del motore: il controller gestisce vari parametri del motore per massimizzare l'efficienza complessiva.
In passato, i controller venivano costruiti utilizzando componenti discreti insieme a un microcontrollore che eseguiva il firmware con gli algoritmi di controllo. Tuttavia, la tendenza attuale favorisce soluzioni altamente integrate che combinano funzioni di alimentazione e controllo in un unico chip.
I motori BLDC (Brushless DC) trovano ampia applicazione
I motori BLDC (Brushless DC) trovano ampia applicazione in svariati settori e sistemi grazie alle loro vantaggiose caratteristiche costruttive. I vantaggi derivanti dalla commutazione elettronica, come una migliore gestione della corrente, un aumento della coppia, un controllo preciso della velocità e un miglioramento delle prestazioni complessive del motore, contribuiscono al loro uso diffuso. Alcune delle principali applicazioni dei motori BLDC includono:
- Applicazioni industriali: i motori BLDC sono utilizzati in macchinari e attrezzature industriali, come pompe, compressori, nastri trasportatori e macchine utensili, per garantire un funzionamento efficiente e affidabile.
- Veicoli elettrici (EV) e mobilità elettrica: i motori BLDC sono parte integrante dei veicoli elettrici, tra cui auto, moto, scooter e biciclette, grazie alla loro elevata efficienza, densità di potenza e autonomia migliorata.
- Veicoli aerei senza equipaggio (UAV) e droni: i motori BLDC sono comunemente impiegati negli UAV e nei droni per il loro design leggero, l'elevata efficienza e il controllo preciso, che consentono volo stabile e manovrabilità.
- Dischi rigidi: i motori BLDC sono utilizzati nelle unità disco rigido per ottenere un controllo del motore del mandrino preciso e affidabile, garantendo operazioni di lettura/scrittura accurate dei dati.
- Elettronica di consumo: i motori BLDC si trovano in vari dispositivi elettronici di consumo come ventole, condizionatori d'aria, frigoriferi e lavatrici, offrendo efficienza energetica, funzionamento silenzioso e durata prolungata.
- Robotica e automazione industriale: i motori BLDC sono ampiamente utilizzati nei sistemi robotici e nelle apparecchiature di automazione per il loro preciso controllo del movimento, la coppia elevata e la durata. Consentono processi più sicuri ed efficienti, migliorando la produttività nelle industrie.
I bracci robotici industriali, in particolare, stanno rivoluzionando i processi di produzione migliorando la sicurezza dei lavoratori, accelerando la produzione e aumentando la produttività. Questi bracci robotici versatili e programmabili sono utilizzati in fabbriche, magazzini e persino in ambienti agricoli. I motori BLDC svolgono un ruolo fondamentale nei bracci robotici fornendo un'accurata regolazione della velocità e della coppia, oltre ad affidabilità, durata e immunità alle radiazioni elettromagnetiche.
In sintesi, la capacità dei motori BLDC di offrire un controllo preciso della velocità, coppia elevata, durata e immunità alle interferenze elettromagnetiche li rende adatti a varie applicazioni, dai macchinari industriali ai veicoli elettrici e alla robotica.
Progettazione
La progettazione di un controller BLDC richiede esperienza sia negli aspetti hardware che software. Mentre le soluzioni integrate disponibili in commercio possono soddisfare i requisiti della maggior parte delle applicazioni, ci sono casi in cui può essere necessaria una soluzione personalizzata.
Guidatore: Per facilitare la commutazione elettronica, vengono generalmente utilizzati transistor di potenza in grado di resistere a tensioni e correnti elevate. Esempi di tali transistor includono MOSFET al silicio (Si), IGBTs, carburo di silicio (SiC) MOSFETe HEMT al nitruro di gallio (GaN).
L'approccio convenzionale per un controller BLDC prevede una topologia a mezzo ponte. Questa topologia utilizza due switch, con uno Transistor sul lato alto e uno sul lato basso, al contrario di una soluzione full H-bridge. Da Trifase I motori BLDC sono comunemente utilizzati nelle applicazioni di robotica e automazione industriale grazie alle loro prestazioni ed efficienza superiori rispetto alle varianti monofase o bifase, un tipico schema di controller è costituito da tre semiponti. La figura 3 illustra lo schema di a Trifase driver che utilizza un gate driver altamente integrato.

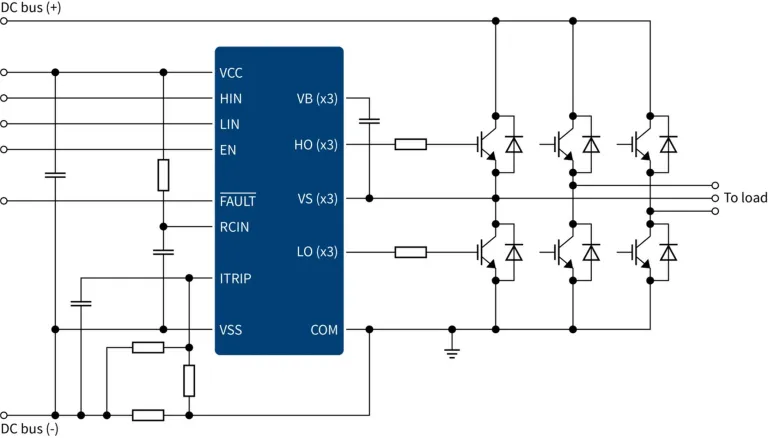
Il controllo dell'a trifase Il motore BLDC prevede sei fasi, che costituiscono un ciclo di commutazione completo, per eccitare tutti e tre gli avvolgimenti dello statore. Ciò si ottiene accendendo e spegnendo in sequenza i transistor high-side e low-side.
Gli interruttori high-side sono comunemente controllati utilizzando la modulazione di larghezza di impulso (%PWM) tecnica. PWM converte l'ingresso CC voltaggio in una tensione di azionamento modulata, consentendo una gestione più efficiente, in particolare durante l'avvio del motore, e consentendo un controllo preciso della velocità e della coppia.
La selezione della frequenza PWM è una considerazione critica. I progettisti spesso mirano a un equilibrio tra le perdite di commutazione, che sono più pronunciate alle alte frequenze, e le correnti di ripple, generate principalmente alle basse frequenze. L'uso di dispositivi GaN (nitruro di gallio) può ridurre significativamente le perdite di commutazione, anche ad alte frequenze.
Ottimizzando attentamente la frequenza PWM e sfruttando la tecnologia GaN, i progettisti possono ottenere una migliore efficienza e prestazioni nel controllo del motore BLDC trifase.