Kelebihan Motor Brushless DC (BLDC) dalam Robotik dan Automasi
Motor DC tanpa berus (BLDC) menawarkan banyak kelebihan berbanding motor berus, menjadikannya pilihan utama dalam aplikasi robotik dan automasi. Walaupun motor BLDC memerlukan sistem kawalan untuk peraturan kelajuan dan tork yang tepat, faedahnya melebihi kerumitan tambahan. Kelebihan utama motor BLDC termasuk:
- Kecekapan Dipertingkat: Motor BLDC memberikan kecekapan tenaga yang lebih tinggi, faktor penting memandangkan penggunaan elektrik global yang ketara disebabkan oleh motor elektrik.
- Kawalan Tepat: Motor BLDC membolehkan kawalan kelajuan dan tork yang tepat, membolehkan prestasi dioptimumkan dalam keadaan beban yang berbeza-beza. Tahap kawalan ini penting dalam robotik dan automasi, di mana pergerakan dan tindak balas yang tepat diperlukan.
- Ketahanan Yang Dipertingkatkan: Tidak seperti motor berus yang mengalami penurunan prestasi akibat kehausan berus dan lengkok, motor BLDC mengekalkan prestasinya dari semasa ke semasa. Panjang umur ini menyumbang kepada kebolehpercayaan keseluruhan dan jangka hayat sistem robotik.
- Operasi Bunyi Rendah: Motor BLDC beroperasi dengan senyap, meminimumkan penjanaan hingar dalam aplikasi robotik. Ciri ini amat penting dalam persekitaran yang memerlukan tahap hingar yang dikurangkan untuk pengalaman pengguna yang lebih baik atau untuk memenuhi piawaian kawal selia.
- Gangguan Elektromagnet Dikurangkan (EMI): Motor BLDC menghasilkan gangguan elektromagnet tahap yang lebih rendah, memastikan gangguan minimum kepada komponen elektronik lain atau sistem komunikasi dalam sistem robotik.
- Reka Bentuk Padat dan Ringan: Motor BLDC direka bentuk padat dan ringan, menjadikannya sesuai untuk aplikasi dengan ruang terhad atau sekatan berat. Kelebihan ini memudahkan penyepaduan motor BLDC dalam pelbagai sistem robotik, daripada peranti berskala kecil kepada persediaan automasi industri yang besar.
Dengan kecekapan unggul, kawalan tepat, ketahanan, operasi hingar yang rendah, pengurangan EMI dan reka bentuk padat, motor BLDC telah menjadi sangat diperlukan dalam pelbagai aplikasi. Daripada pemacu keras komputer kepada kenderaan elektrik dan daripada robotik berskala kecil kepada automasi industri yang besar, motor BLDC terus memacu kemajuan dalam kecekapan dan prestasi merentas industri robotik dan automasi.


Satu kelemahan motor BLDC ialah kawalan yang rumit litar dan kenaikan perbelanjaan seterusnya. Isyarat elektrik bermasa yang tepat diperlukan untuk teknik pensuisan elektronik, yang memerlukan litar pemacu yang boleh menjananya.
Namun begitu, pereka moden kini mempunyai kelebihan ketersediaan komersil yang meluas bagi peranti kuasa yang direka khusus untuk pemandu motor BLDC. Peranti ini datang dalam bentuk kendiri atau disepadukan dengan mikropengawal (pengawal), menjadikan proses reka bentuk lebih mudah dan mengurangkan kos keseluruhan penyelesaian.
Para pengawal
Selain daripada mengawal kelajuan dan tork, memainkan peranan penting dalam memulakan, menghentikan dan menterbalikkan putaran motor. Ia boleh memperoleh maklumat kedudukan rotor melalui dua kaedah: sensor-kawalan jenis, di mana pengawal menerima data ini secara langsung, atau kawalan tanpa sensor, di mana pengawal menyimpulkan kedudukan menggunakan algoritma yang sesuai dilaksanakan pada tahap perisian tegar atau perkakasan. Isyarat elektrik yang digunakan pada MOSFET kuasa, dari segi amplitud dan tempoh, ditentukan berdasarkan kedudukan rotor.
Motor BLDC penderia biasanya digunakan dalam aplikasi di mana menghidupkan motor di bawah beban diperlukan kerana kedudukan sebenar motor diketahui dengan serta-merta. Terdapat beberapa kaedah untuk menentukan kedudukan:
- Penderia magnet kesan dewan: Penderia ini sangat berdaya tahan dan boleh beroperasi dengan berkesan walaupun dalam keadaan yang teruk, seperti aplikasi automotif.
- Pengekod berputar: Peranti ini menukar gerakan mekanikal kepada impuls elektrik dan menyediakan data penting seperti kedudukan, kelajuan dan arah. Bergantung kepada teknologi digunakan, pengekod boleh optik, kapasitif, atau magnet.
- Penderia keengganan boleh ubah: Penderia ini menjana isyarat elektrik yang sepadan dengan anjakan objek pengalir magnet atau telap berhubung dengan gegelung.

Pengawal tanpa sensor menggunakan teknik menganggar daya gerak elektrik belakang (EMF) yang dijana dalam belitan stator oleh angker berputar untuk mengesan kedudukan semasa rotor. Dengan mengukur EMF belakang, pengawal boleh menentukan kedudukan rotor, dengan EMF belakang yang lebih tinggi menunjukkan magnet yang lebih dekat.
Reka bentuk atau pemilihan pengawal adalah tugas kritikal yang memerlukan ketepatan yang teliti. Fungsi utama yang dilakukan oleh pengawal motor adalah seperti berikut:
- Peraturan kelajuan dan arah: Pengawal mengawal kelajuan motor dan mengawal arah putarannya.
- Peraturan tork: Dengan memantau beban yang dikenakan, pengawal menentukan nilai tork yang sesuai untuk mencapai prestasi motor yang optimum.
- Pengurusan fasa mula dan henti: Pengawal memulakan dan menghentikan motor secara beransur-ansur, mengikut profil pecutan dan nyahpecutan yang tepat.
- Perlindungan terhadap lebihan voltan atau lebihan arus: Pengawal melindungi motor dengan mengesan dan bertindak balas terhadap berlebihan voltan atau tahap semasa.
- Pengoptimuman kecekapan motor: Pengawal menguruskan pelbagai parameter enjin untuk memaksimumkan kecekapan keseluruhan.
Pada masa lalu, pengawal dibina menggunakan komponen diskret bersama-sama dengan mikropengawal yang melaksanakan perisian tegar dengan algoritma kawalan. Walau bagaimanapun, aliran semasa mengutamakan penyelesaian bersepadu yang menggabungkan kuasa dan fungsi kawalan ke dalam satu cip.
Motor BLDC (Brushless DC) menemui aplikasi yang meluas
Motor BLDC (Brushless DC) mendapat aplikasi yang meluas dalam pelbagai industri dan sistem kerana ciri pembinaannya yang berfaedah. Faedah yang diperoleh daripada pertukaran elektronik, seperti pengurusan semasa yang dipertingkatkan, peningkatan tork, kawalan kelajuan yang tepat dan peningkatan prestasi motor secara keseluruhan, menyumbang kepada penggunaannya yang meluas. Beberapa aplikasi ketara motor BLDC termasuk:
- Aplikasi industri: Motor BLDC digunakan dalam mesin dan peralatan industri, seperti pam, pemampat, penghantar dan alatan mesin, untuk menyediakan operasi yang cekap dan boleh dipercayai.
- Kenderaan elektrik (EV) dan e-mobiliti: Motor BLDC ialah bahagian penting kenderaan elektrik, termasuk kereta, motosikal, skuter dan basikal, kerana kecekapan tinggi, ketumpatan kuasa dan julat yang dipertingkatkan.
- Kenderaan udara tanpa pemandu (UAV) dan dron: Motor BLDC biasanya digunakan dalam UAV dan dron untuk reka bentuk ringan, kecekapan tinggi dan kawalan yang tepat, membolehkan penerbangan dan kebolehgerakan yang stabil.
- Pemacu keras: Motor BLDC digunakan dalam pemacu cakera keras untuk mencapai kawalan motor gelendong yang tepat dan boleh dipercayai, memastikan operasi baca/tulis data yang tepat.
- Elektronik pengguna: Motor BLDC ditemui dalam pelbagai peranti elektronik pengguna seperti kipas, penghawa dingin, peti sejuk dan mesin basuh, menawarkan kecekapan tenaga, operasi yang senyap dan jangka hayat yang dilanjutkan.
- Robotik dan automasi industri: Motor BLDC digunakan secara meluas dalam sistem robotik dan peralatan automasi untuk kawalan gerakan yang tepat, tork tinggi dan ketahanannya. Ia membolehkan proses yang lebih selamat dan cekap, meningkatkan produktiviti dalam industri.
Senjata robot industri, khususnya, sedang merevolusikan proses pembuatan dengan meningkatkan keselamatan pekerja, mempercepatkan pengeluaran dan meningkatkan produktiviti. Lengan robot yang serba boleh dan boleh diprogramkan ini digunakan di kilang, gudang, dan juga tetapan pertanian. Motor BLDC memainkan peranan penting dalam lengan robot dengan menyediakan kelajuan dan peraturan tork yang tepat, di samping kebolehpercayaan, ketahanan dan imuniti kepada sinaran elektromagnet.
Secara ringkasnya, keupayaan motor BLDC untuk menawarkan kawalan kelajuan yang tepat, tork yang tinggi, ketahanan dan imuniti kepada gangguan elektromagnet menjadikannya sangat sesuai untuk pelbagai aplikasi, daripada jentera perindustrian kepada kenderaan elektrik dan robotik.
Merekabentuk
Mereka bentuk pengawal BLDC memerlukan kepakaran dalam kedua-dua aspek perkakasan dan perisian. Walaupun penyelesaian bersepadu yang tersedia secara komersial boleh memenuhi keperluan kebanyakan aplikasi, terdapat kes di mana penyelesaian tersuai mungkin diperlukan.
Pemandu: Untuk memudahkan pertukaran elektronik, transistor kuasa yang mampu menahan voltan tinggi dan arus biasanya digunakan. Contoh transistor tersebut termasuk MOSFET silikon (Si), IGBTs, silikon karbida (SiC) MOSFETs, dan gallium nitride (GaN) HEMTs.
Pendekatan konvensional untuk pengawal BLDC melibatkan topologi separuh jambatan. Topologi ini menggunakan dua suis, dengan satu Transistor di bahagian tinggi dan satu di bahagian bawah, berbanding dengan penyelesaian jambatan H penuh. Sejak Tiga Fasa Motor BLDC biasanya digunakan dalam aplikasi robotik dan automasi industri kerana prestasi dan kecekapannya yang unggul berbanding dengan varian fasa tunggal atau dwi-fasa, skim pengawal biasa terdiri daripada tiga jambatan separuh. Rajah 3 menggambarkan rajah a Tiga Fasa pemandu yang menggunakan pemandu pintu berintegrasi tinggi.

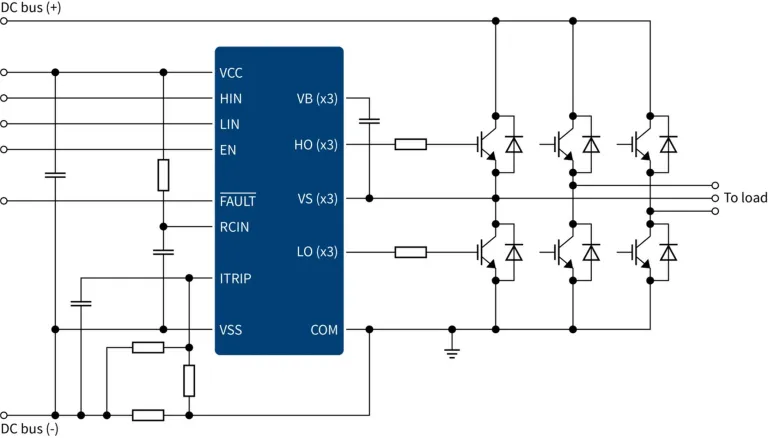
Kawalan a tiga fasa Motor BLDC melibatkan enam langkah, yang membentuk kitaran pertukaran yang lengkap, untuk memberi tenaga kepada ketiga-tiga belitan stator. Ini dicapai dengan menghidupkan dan mematikan transistor sisi tinggi dan sisi rendah secara berurutan.
Suis sisi tinggi biasanya dikawal menggunakan modulasi lebar denyut (PWM) teknik. PWM menukar input DC voltan menjadi voltan pemacu termodulat, membolehkan pengurusan yang lebih cekap, terutamanya semasa permulaan motor, dan membolehkan kawalan kelajuan dan tork yang tepat.
Pemilihan frekuensi PWM adalah pertimbangan kritikal. Pereka bentuk sering menyasarkan keseimbangan antara kehilangan pensuisan, yang lebih ketara pada frekuensi tinggi, dan arus riak, yang dijana terutamanya pada frekuensi rendah. Penggunaan peranti GaN (gallium nitride) boleh mengurangkan kehilangan pensuisan dengan ketara, walaupun pada frekuensi tinggi.
Dengan mengoptimumkan frekuensi PWM dengan teliti dan memanfaatkan teknologi GaN, pereka boleh mencapai kecekapan dan prestasi yang lebih baik dalam mengawal motor BLDC tiga fasa.