Eine entscheidende Verbesserung liegt in den integrierten Lichtempfangsschaltungen aus Silizium-Photomultiplier (SiPM), die durch Transistoren gesteuerte Lichtempfangszellen aufweisen.
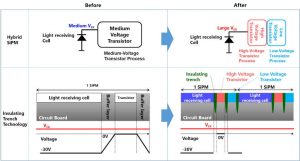

Die neuen Chips haben kleinere Transistor Module, ersetzen Pufferschichten zum Schutz der Transistoren durch neu entwickelte Isoliergräben zwischen den Transistoren und den Lichtempfangszellen (Diagramm rechts).
Um den Empfindlichkeitsverlust bei der Verwendung kleinerer Transistoren wiederherzustellen, muss ein hoher Widerstand Spannung Abschnitt wurde hinzugefügt, um den Spannungseingang zu den Lichtempfängern zu erhöhen.
„Wir haben Technologien entwickelt, die für eine kompakte, hochauflösende und weitreichende [200 m] Solid-State-Lidar-Lösung unerlässlich sind, die robust und einfach zu implementieren ist“, so der Toshiba-Wissenschaftler Akihide Sai. „Die Nachfrage nach einer solchen Lösung wird sowohl in den Anwendungen für autonomes Fahren als auch für die Überwachung der Verkehrsinfrastruktur erwartet.“


Insgesamt ist der Silizium-Photomultipier 75 % und 50 % empfindlicher als der Demonstrator von Toshiba vom Juli 2020. Mit mehr ICs nebeneinander ist die Auflösung 4x bis 1200 x 80.
Dank verbesserter Komponentenverpackung beträgt die Gesamtgröße des Lidar-Projektors und -Empfängers nur 350 cm3 (links).
Für den wetterunabhängigen Einsatz im Freien wurde ein Temperaturausgleichsmechanismus hinzugefügt, der die an die Lichtempfangszellen angelegte Spannung automatisch anpasst.
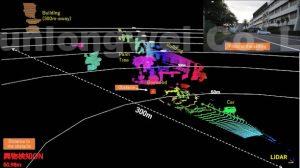

Bei einer Demonstration (Recht) Hindernisse wurden an einem sonnigen Tag im Freien erkannt. Das Lidar identifizierte ein Ziel (einen Karton) und maß seine Wut auf 50.98 m (Abbildung unten links). Die maximale Erkennungsreichweite betrug ~300 m. Der Test war bei 1feame/s mit einem festen Winkel.
Anwendungen sind bei der straßenseitigen Warnung vor Setzungen, Erdrutschen, Schneebedeckung oder Gegenständen auf der Fahrbahn vorgesehen. „Aktuelle Methoden zur Überwachung der Verkehrsinfrastruktur basieren auf Kameras, aber ihre Leistung wird durch schwache Lichtverhältnisse und widrige Wetterbedingungen beeinträchtigt“, sagte das Unternehmen.
Es gibt zwei Erkennungsvideos:
Drei Hindernisse bei Nacht (1 Frame/s, fester Winkel, ~200 m Erkennung)
Sonnige Tagerkennung eines auf 20 m geparkten Autos und eines Gebäudes auf 300 m (20 Bilder/s)