Una mejora clave se encuentra dentro de los circuitos integrados receptores de luz del fotomultiplicador de silicio (SiPM) que tienen células receptoras de luz controladas por transistores.
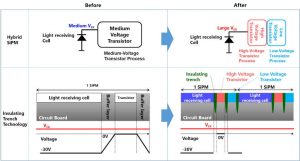

Los nuevos chips tienen Transistor módulos, reemplace las capas de búfer que protegen los transistores con trincheras aislantes recientemente desarrolladas entre los transistores y las celdas receptoras de luz (diagrama a la derecha).
Para recuperar la sensibilidad perdida al usar transistores más pequeños, una alta resistencia voltaje Se ha agregado una sección para aumentar la entrada de voltaje a los receptores de luz.
“Hemos desarrollado tecnologías esenciales para una solución lidar de estado sólido compacta, de alta resolución y largo alcance [200 m] que es robusta y fácil de implementar”, según el científico de Toshiba Akihide Sai. "La demanda de una solución de este tipo se anticipa tanto en las aplicaciones de supervisión de la infraestructura de transporte como en la conducción autónoma".


En general, el fotomultiplicador de silicio es un 75% y un 50% más sensible que el demostrador de Toshiba de julio de 2020. Con más circuitos integrados uno al lado del otro, la resolución es 4x hasta 1200 x 80.
Con el empaquetado mejorado de los componentes, el tamaño total del proyector y receptor lidar se ha reducido a 350 cm.3 (izquierda).
Trabajando hacia el uso al aire libre en todo clima, se ha agregado un mecanismo de compensación de temperatura ajustando automáticamente el voltaje aplicado a las celdas receptoras de luz.
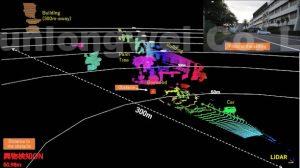

En una demostración (Derecho) se detectaron obstáculos al aire libre en un día soleado. El lidar identificó un objetivo (una caja de cartón) y midió su rabia a 50.98 m (figura inferior izquierda). El rango de detección máximo fue de ~ 300 m. La prueba se realizó a 1 hora / s con un ángulo fijo.
Las aplicaciones están previstas en el lado de la carretera advirtiendo de hundimientos, deslizamientos de tierra, capa de nieve u objetos en la calzada. “Los métodos actuales para monitorear la infraestructura de transporte se basan en cámaras, pero su rendimiento se ve degradado por los bajos niveles de luz y las condiciones climáticas adversas”, dijo la compañía.
Hay dos videos de detección:
Tres obstáculos por la noche (1 fotograma / s, ángulo fijo, detección de ~ 200 m)
Detección de día soleado de un coche aparcado a 20 my un edificio a 300 m (20 fotogramas / s)