Une amélioration clé se trouve dans les circuits intégrés photomultiplicateurs au silicium (SiPM) recevant la lumière qui ont des cellules réceptrices de lumière contrôlées par des transistors.
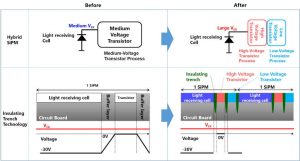

Les nouvelles puces ont de plus petites Transistor modules, remplacer les couches tampons protégeant les transistors par des tranchées isolantes nouvellement développées entre les transistors et les cellules photoréceptrices (diagramme à droite).
Pour récupérer la sensibilité perdue en utilisant des transistors plus petits, un Tension a été ajoutée pour augmenter la tension d'entrée des récepteurs de lumière.
« Nous avons développé des technologies essentielles pour une solution lidar à semi-conducteurs compacte, haute résolution et longue portée [200 m], robuste et simple à mettre en œuvre », selon le scientifique de Toshiba Akihide Sai. « La demande pour une telle solution est prévue à la fois dans les applications de conduite autonome et de surveillance des infrastructures de transport. »


Dans l'ensemble, le photomultiplicateur en silicium est 75 % et 50 % plus sensible que le démonstrateur Toshiba de juillet 2020, avec plus de circuits intégrés côte à côte, la résolution est de 4x à 1200 x 80.
Avec un emballage de composants amélioré, la taille globale du projecteur et du récepteur lidar est réduite à 350 cm3 (à gauche).
Travaillant vers une utilisation en extérieur par tous les temps, un mécanisme de compensation de température a été ajouté en ajustant automatiquement la tension appliquée aux cellules photoréceptrices.
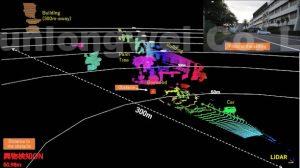

Dans une manifestation (bon) des obstacles ont été détectés à l'extérieur par une journée ensoleillée. Le lidar a identifié une cible (une boîte en carton) et mesuré sa rage à 50.98 m (figure en bas à gauche). La portée de détection maximale était d'environ 300 m. Le test était à 1feame/s avec un angle fixe.
Des applications sont prévues au bord de la route pour avertir des affaissements, des glissements de terrain, de la couverture neigeuse ou des objets sur la chaussée. « Les méthodes actuelles de surveillance des infrastructures de transport reposent sur des caméras, mais leurs performances sont dégradées par les faibles niveaux de luminosité et les conditions météorologiques défavorables », a déclaré la société.
Il y a deux vidéos de détection :
Trois obstacles la nuit (1 image/s, angle fixe, détection ~200m)
Détection de jour ensoleillé d'une voiture garée à 20m et d'un immeuble à 300m (20frame/s)