Un miglioramento chiave è all'interno dei circuiti integrati di ricezione della luce fotomoltiplicatori al silicio (SiPM) che hanno celle di ricezione della luce controllate da transistor.
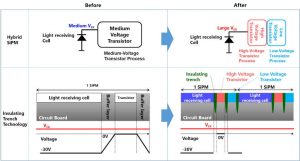

I nuovi chip sono più piccoli Transistor moduli, sostituire gli strati tampone che proteggono i transistor con trincee isolanti di nuova concezione tra i transistor e le celle riceventi la luce (diagramma a destra).
Per recuperare la sensibilità persa nell'uso di transistor più piccoli, un'alta resistenza voltaggio è stata aggiunta una sezione per aumentare la tensione in ingresso ai ricevitori di luce.
"Abbiamo sviluppato tecnologie essenziali per una soluzione lidar a stato solido compatta, ad alta risoluzione e a lungo raggio [200 m], robusta e semplice da implementare", secondo lo scienziato Toshiba Akihide Sai. "La richiesta di tale soluzione è prevista sia nelle applicazioni di guida autonoma che di monitoraggio delle infrastrutture di trasporto".


Nel complesso, il fotomoltiplicatore al silicio è del 75% e del 50% più sensibile rispetto al dimostratore Toshiba di luglio 2020, con più circuiti integrati affiancati, la risoluzione è da 4x a 1200 x 80.
Con una migliore confezione dei componenti, la dimensione complessiva del proiettore e del ricevitore lidar è ridotta a 350 cm3 (a sinistra).
Lavorando per un uso esterno per tutte le stagioni, è stato aggiunto un meccanismo di compensazione della temperatura regolando automaticamente la tensione applicata alle celle di ricezione della luce.
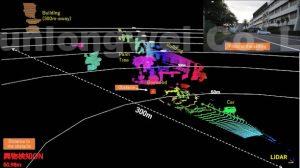

In una manifestazione (destra) sono stati rilevati ostacoli all'aperto in una giornata di sole. Il lidar ha identificato un bersaglio (una scatola di cartone) e ha misurato la sua rabbia a 50.98 m (figura in basso a sinistra). Il raggio di rilevamento massimo era ~ 300 m. Il test era a 1feame/s con un angolo fisso.
Sono previste applicazioni a bordo strada di segnalazione di cedimenti, smottamenti, manto nevoso o oggetti presenti in carreggiata. "Gli attuali metodi per monitorare le infrastrutture di trasporto si basano su telecamere, ma le loro prestazioni sono degradate da bassi livelli di luce e condizioni meteorologiche avverse", ha affermato la società.
Ci sono due video di rilevamento:
Tre ostacoli di notte (1 fotogramma/s, angolo fisso, rilevamento ~200 m)
Rilevamento in giornata di sole di un'auto parcheggiata a 20 m e di un edificio a 300 m (20 frame/s)