

新しいコントローラーは BLH2D と呼ばれます (写真右).
オリエンタルモーターは、「モーター制御方式としてベクトル制御を採用することで、BLH2D は電流位相を制御することができます」と述べています。 「これにより、回生電力やトルク制限の処理が可能」「BLH2Dは、可聴周波数20Hz~20kHzの振動を従来機に比べ低減できる」
以前の BLH はブレーキが効きませんでしたが、BLH2D での制御は XNUMX 象限です: 両方の回転方向でのアクティブな加速とアクティブなブレーキングです。
積極的にブレーキをかけると、モーターは発電機として機能し、コントローラーはこの回生電力を XNUMX つの事前設定可能な方法で処理できます。

モーターが余分な熱に耐えられない場合は、フリーラン停止が可能です。 ブレーキングは弱く、以前のモデルを使用した減速に似ています。
モーターが余分な熱を処理できず、強力なブレーキが必要な場合、またはエネルギーを上流のバッテリーに戻す必要がある場合は、完全な回生ブレーキも利用できます。
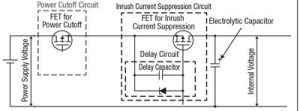
古いタイプとは異なり、突入電流制限が提供され (左上の図も参照)、突入電流を 95% も削減します。
モデルに応じて、次の XNUMX つのインターフェイス オプションを使用できます。
後方互換性のあるアナログ制御バージョンで、ポテンショメータまたは外部電圧からの速度制御が可能です。 「電源ケーブル、IOケーブル、モーターケーブルは従来の【BLH】モデルと互換性があります。 従来モデルと同様、減速動作は惰性で停止しています」とオリエンタル氏。
同社が情報をほとんど公開していないデジタルタイプがあります。 少なくとも PWM 経由で制御でき、「アナログ速度調整はまだ可能です」と同社は述べています。 PC上で動作する同社の「MEXE02」ソフトウェアを使用して、USB経由でセットアップできます。 算出した負荷率はMEXE02ソフトのステータスモニター機能で表示・確認できます。 異常が検出された場合は、予知保全を開始できます。」
さらにデジタル バージョンでは、デジタル バージョンでできることすべてに RS-485 インターフェイスが追加されます。 これは、アナログ タイプと同様のケーブル接続で機能しますが、同一ではありません。 システムをアップグレードし、既存の BLH モデルを置き換えるために使用できます」とオリエンタル氏は述べています。